1.本发明涉及无植保人机领域,尤其涉及一种无人机风送静电离心式喷雾喷头、系统及控制方法。
背景技术:
2.无人植保机近年在国内得到了广泛的应用,它能够在复杂地形起降并且在作物上空进行农药喷洒作业。对于降低农民的劳动强度,提升农药的利用效率发挥了很大的作用。与此同时,无人机植保在自然环境风速比较大的情况下,雾滴漂移是比较严重的问题。目前采取的方式,一般是增加沉降剂或多次喷洒,增加了成本和化学药剂的增加使用,不符合农业绿色高质量发展要求。
3.现有无人植保机主要使用三种喷头:液力式喷头、离心喷头、静电喷头。
4.液力式喷头直接通过压力泵作用将液体泵出,结构简单,使用方便,但存在液滴分布不均,农药喷洒效果不好的缺点。
5.离心喷头通过高速旋转的转盘,产生离心力作用,将雾滴雾化成更小的雾滴颗粒,雾滴直径也更加均匀,相比液力式喷头具有更好的雾化效果,且具有不易堵塞的优点。但同时,离心喷头存在雾滴漂移严重、雾滴在作物表面沉积效果不好的缺点。
6.静电喷雾技术通过在喷头和被施药靶标间建立静电场,使得雾滴在静电力和重力的双重作用下,朝靶标运动,相比与其他两种喷头,其农药沉积效果良好,能够更好地细分雾滴,增加雾滴的均匀性。但现有静电喷雾的喷幅依然受离心转盘转速影响,转速越大,喷幅越大,当喷幅过大时,会造成雾滴漂移的问题,农药不能有效喷洒。
7.因此,设计既能增加雾滴均匀性和沉积效果,且能解决雾滴漂移影响,使农药准确喷洒至作物,是无人机植保喷雾技术亟需解决的难题。
技术实现要素:
8.本发明提供了一种无人机风送静电离心式喷雾喷头、系统及控制方法,以解决现有的喷雾技术在提高雾滴均匀性的同时难以解决雾滴飘移的问题。
9.第一方面,提供了一种无人机风送静电离心式喷雾喷头,包括送风系统和静电喷头系统;
10.所述送风系统包括涵道风机、送风筒、导流罩;所述涵道风机设置于所述送风筒内且位于所述送风筒的中段;所述导流罩设置于所述送风筒内且位于所述送风筒的下段,所述导流罩上设置有电机接线口;所述送风筒上设置有接线出口和进液口;
11.所述静电喷头系统包括连接环、静电发生环、电机、离心转盘;所述连接环与所述送风筒底部连接,所述静电发生环设置于所述连接环中间位置;所述电机设置于所述导流罩内,所述电机的输出轴穿过所述连接环与所述离心转盘连接;
12.所述静电喷头系统用于将液滴离心成均匀的雾滴,并使雾滴带上静电;所述送风系统用于提供向下的风力,并将雾滴抑制在一定范围内。
13.工作时,药液经进液口送入离心转盘上方,药液在离心转盘离心力的作用下沿着转盘甩出先形成液膜,此时液膜与静电发生环产生感应带电;液膜到达离心转盘边缘后分裂成液丝,再呈点状抛甩出,与空气撞击后形成雾滴,雾滴具有水平方向的初速度,在涵道风机、重力、空气阻力影响下,液滴由水平方向运动开始朝着斜下方运动。通过送风系统与静电喷头系统的结合,静电喷头系统将药液离心成均匀的雾滴,并使雾滴带上静电,提高了雾滴均匀性及沉积水平;由送风系统提供向下的风力将静电喷头系统产生的雾滴抑制在一定的半径范围内,可有效防止雾滴的飘移。
14.进一步地,所述送风筒的下段为喇叭状。该结构设计加速了空气的流出,利于送风系统的工作。
15.进一步地,所述送风筒的底部朝外且向上翘起;所述连接环的边缘向上翘起,且与所述送风筒底部结构匹配。该结构设计可避免液滴从离心转盘甩出后撞击在连接环上,从而造成药液的损失。
16.进一步地,所述导流罩为半椭球状。该结构设计的目的是将空气快速且平均地导流至离心转盘边缘。
17.进一步地,所述连接环中部设置有静电发生环固定环,所述静电发生环安装于所述静电发生环固定环上,且所述静电发生环底部设置有绝缘层。在静电发生环底部设置有绝缘层,可避免雾滴直接接触静电发生环。
18.进一步地,所述静电发生环、静电发生环固定环形状相同,且均设置有便于所述进液口导入药液至所述离心转盘的缺口。
19.进一步地,所述离心转盘为圆锥状,其内部分布有若干细凹槽。内部有细凹槽能加速药液的流出和雾化。雾滴在离心力的作用下高速甩出,在离心转盘边缘雾化。
20.进一步地,所述送风筒顶部设置有连接角件;且所述送风筒上段设置有进风缺口。连接角件用于将该喷头固定在无人机机架上;进风缺口有利于外部空气进入,确保涵道风机提供的风力的稳定性。
21.进一步地,所述涵道风机转速与所述电机转速的平方呈正比变化,以将雾滴抑制在一定范围不变。涵道风机的转速随着电机的转速的增大而增大,或随着电机的转速的减小而减小,以应对不同喷幅条件下对雾滴漂移的抑制,从而保证了施药半径抑制在一定范围不变,防止雾滴飘移。
22.第二方面,提供了一种无人机风送静电离心式喷雾系统,包括控制器、电源、静电发生器、水泵及两个如上所述的无人机风送静电离心式喷雾喷头;所述电源与所述静电发生器电连接,所述静电发生器的正负两个极性输出端分别与所述两个无人机风送静电离心式喷雾喷头的静电发生环电连接;所述水泵的输入端连通至水箱,其输出端连通至两个所述无人机风送静电离心式喷雾喷头;所述无人机风送静电离心式喷雾喷头内的涵道风机、电机及水泵均与所述控制器电连接;所述控制器用于获取无人机飞行速度及所处环境风速、风向数据,并基于获取的数据控制涵道风机转速、电机转速及水泵压力,以将雾滴抑制在一定范围内。
23.第三方面,提供了如上所述的无人机风送静电离心式喷雾系统的控制方法,包括:
24.控制器用于获取无人机飞行速度及所处环境风速、风向数据;
25.第一无人机飞行速度超过第一预设速度的情况下:当无人机加速时,会导致雾滴
向后漂移,此时控制器控制电机及涵道风机的转速相应增大,同时控制水泵压力增大;当无人机减速时,控制器控制电机及涵道风机的转速相应减小,同时控制水泵压力减小;从而可保持在无人机加减速过程中防止液滴飘移的同时保证施药量不变,从而更好地保障施药质量;
26.当无人机飞行速度低于第二预设速度的情况下:控制器控制水泵压力减少,并控制涵道风机和电机的转速不变,以保持喷幅不变且防止过量喷洒;
27.当无人机飞行速度处于第一预设速度和第二预设速度之间且无侧风的情况下,涵道风机转速、电机转速及水泵压力不随无人机飞行速度变化而变化;此时,涵道风机转速保持低转速以应对无人机下旋风场带来的漂移影响;
28.当检测到发生侧风情况时,控制器控制靠近侧风向的无人机风送静电离心式喷雾喷头的电机和涵道风机转速增大,远离侧风向的无人机风送静电离心式喷雾喷头的电机和涵道风机转速减小。可实现调整后的系统所喷液滴在侧风的影响下与预定喷洒轨迹接近。
29.有益效果
30.本发明提出了一种无人机风送静电离心式喷雾喷头、系统及控制方法,将风送技术与静电喷雾技术应用在离心喷头上,改善了传统喷头容易产生雾滴漂移与均匀性不够的缺点,使雾滴加速坠落,并带电,提高了雾滴沉积水平。在设计细节上,将送风筒下端设计为喇叭状,加大了空气的流出量,有利于送风系统的工作;离心转盘内部设计为细凹槽,可以加速药液的流出和雾化;连接环设置为向上开口的锥形,避免了离心转盘甩出的药滴撞击在连接环上;静电发生环采用缺口设计,方便了进水口的进水。通过涵道风机与离心转盘的转速相适应调节,同时保证了飞行过程中的施药量与施药半径不变,从而更好地保障施药质量。
附图说明
31.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
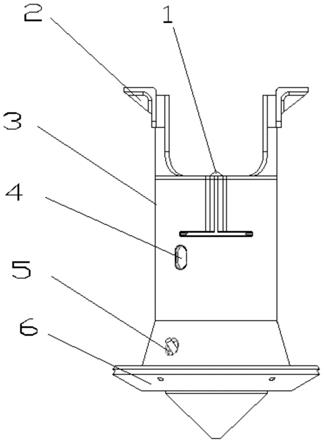
32.图1是本发明实施例提供的无人机风送静电离心式喷雾喷头整体结构示意图;
33.图2是本发明实施例提供的无人机风送静电离心式喷雾喷头剖视图;
34.图3是本发明实施例提供的连接环结构示意图;
35.图4是本发明实施例提供的静电发生环结构示意图;
36.图5是本发明实施例提供的无人机风送静电离心式喷雾系统结构示意图;
37.图6是本发明实施例提供的涵道风机与离心转盘转速相适应调节的程序流程图。
38.图中:1、涵道风机;2、连接角件;3、送风筒;4、接线出口1;5、进液口;6、连接环;7、紧固口;8、导流罩;9、离心转盘;10、静电发生环;11、水箱;12、水泵;13、电源;14、软管;15、静电发生器;16、无人机风送静电离心式喷雾喷头;61、螺孔;62、缺口;63、出风口;64、静电发生环固定环;81、电机接线口。
具体实施方式
39.为使本发明的目的、技术方案和优点更加清楚,下面将对本发明的技术方案进行详细的描述。显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所得到的所有其它实施方式,都属于本发明所保护的范围。
40.在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”、“中心”、“纵向”、“横向”、“竖直”、“水平”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
41.如图1至图4所示,本发明实施例提供了一种无人机风送静电离心式喷雾喷头,包括送风系统和静电喷头系统;
42.所述送风系统包括涵道风机1、送风筒3、导流罩8;所述涵道风机1设置于所述送风筒3内且位于所述送风筒3的中段;所述导流罩8设置于所述送风筒3内且位于所述送风筒3的下段,所述导流罩8上设置有电机接线口81;所述送风筒3上设置有接线出口4和进液口5;
43.所述静电喷头系统包括连接环6、静电发生环10、电机、离心转盘9;所述连接环6与所述送风筒3底部连接,所述静电发生环10设置于所述连接环6中间位置;所述电机设置于所述导流罩8内,所述电机的输出轴穿过所述连接环6与所述离心转盘9连接;
44.所述静电喷头系统用于将液滴离心成均匀的雾滴,并使雾滴带上静电;所述送风系统用于提供向下的风力,并将雾滴抑制在一定范围内。
45.工作时,药液经进液口5送入离心转盘9上方,药液在离心转盘9离心力的作用下沿着转盘甩出先形成液膜,此时液膜与静电发生环10产生感应带电;液膜到达离心转盘9边缘后分裂成液丝,再呈点状抛甩出,与空气撞击后形成雾滴,雾滴具有水平方向的初速度,在涵道风机1、重力、空气阻力影响下,液滴由水平方向运动开始朝着斜下方运动。通过送风系统与静电喷头系统的结合,静电喷头系统将药液离心成均匀的雾滴,并使雾滴带上静电,提高了雾滴均匀性及沉积水平;由送风系统提供向下的风力将静电喷头系统产生的雾滴抑制在一定的半径范围内,可有效防止雾滴的飘移。
46.优选地,所述送风筒3的下段为喇叭状。所述送风筒3的底部朝外且向上翘起;所述连接环6的边缘向上翘起,且与所述送风筒3底部结构匹配。将送风筒3下端设计为喇叭状加速了空气的流出,利于送风系统的工作。送风筒3和连接环6均向上翘起,呈向上开口的锥形,该结构可避免液滴从离心转盘9甩出后撞击在连接环6上,从而造成药液的损失。
47.如图3、图4所示,更具体的,连接环6四周分布有若干螺孔61,连接环通过螺孔61连接送风筒3。连接环6中部设置有静电发生环固定环64,所述静电发生环10安装于所述静电发生环固定环64上,通过螺孔安装固定。所述静电发生环10、静电发生环固定环64形状相同,且均设置有便于所述进液口5导入药液至所述离心转盘9的缺口62;连接环6与静电发生环固定环64之间形成多个出风口63。所述静电发生环底部设置有绝缘层,在静电发生环底部设置有绝缘层,可避免雾滴直接接触静电发生环。
48.本实施例中,所述导流罩8为半椭球状。该结构设计的目的是将空气快速且平均地导流至离心转盘9边缘。
49.本实施例中,所述离心转盘9为圆锥状,其内部分布有若干细凹槽。内部有细凹槽能加速药液的流出和雾化。雾滴在离心力的作用下高速甩出,在离心转盘9边缘雾化。离心转盘9中心带有螺纹孔,其与导流罩8内部的电机螺纹连接,由电机电动离心转盘9转动。
50.本实施例中,所述送风筒3顶部设置有连接角件2;且所述送风筒3上段设置有进风缺口。连接角件2用于将该喷头固定在无人机机架上;进风缺口有利于外部空气进入,确保涵道风机1提供的风力的稳定性。接线出口4设置于送风筒3的中段,进液口5设置于送风筒3的下段。送风筒3中段两侧设置有一体成型的紧固扣7,作用是固定涵道风机1。
51.优选地,所述涵道风机1转速与所述电机(或离心转盘9)转速的平方呈正比变化,以将雾滴抑制在一定范围不变。涵道风机1的转速随着离心转盘9的转速的增大而增大,或随着离心转盘9的转速的减小而减小,以应对不同喷幅条件下对雾滴漂移的抑制,从而保证了施药半径抑制在一定范围不变,防止雾滴飘移。具体实施时,涵道风机1和控制离心转盘9转动的电机均由无人机的中控系统控制。事先通过模拟实验模拟出涵道风机1转速与电机(或离心转盘9)转速的平方对应的正比变化关系,然后根据此关系对涵道风机1转速与电机转速进行控制。
52.如图5所示,本发明实施例还提供了一种无人机风送静电离心式喷雾系统,包括控制器、电源13、静电发生器15、水泵12及两个如上所述的无人机风送静电离心式喷雾喷头16;所述电源13与所述静电发生器16电连接,采用双极性静电喷雾连接方式,即所述静电发生器15的正负两个极性输出端分别与所述两个无人机风送静电离心式喷雾喷头16的静电发生环10电连接,因此可使两个无人机风送静电离心式喷雾喷头16带有正负相反的高压静电;所述水泵12的输入端通过软管14连通至水箱11,其输出端通过软管连通至两个所述无人机风送静电离心式喷雾喷头16;所述无人机风送静电离心式喷雾喷头内的涵道风机1、电机及水泵12均与所述控制器电连接;控制器可用无人机的中控系统实现,电源13为控制器、静电发生器15、涵道风机1、电机、水泵12供电;还包括与所述控制器电连接的风速风向传感器,用于检测风向和风速;所述控制器用于获取无人机飞行速度及所处环境风速、风向数据,并基于获取的数据控制涵道风机转速、电机转速及水泵压力,以将雾滴抑制在一定范围内。
53.实施时,无人机上水泵12将水箱11内的药液通过软管14经进液口5泵送至离心转盘9上方,涵道风机1、电机及水泵12均与控制器(无人机的中控系统)电连接,无人机中控系统控制涵道风机1和电机的转速,以及水泵12的压力大小。
54.更具体地,无人机风送静电离心式喷雾系统工作流程如下:
55.首先,涵道风机1启动,向下制造强劲的风力,风经过整流罩8与送风筒下段的喇叭状开口,向斜下方吹出。离心转盘9在整流罩内电机的带动下,高速旋转。
56.其次,无人机上水泵12将药液由软管14经过进水口5泵入离心转盘9上方,药液到达高速旋转离心转盘9后,在离心力的作用下沿着离心转盘9甩出先形成液膜,此时液膜与静电发生环10产生感应带电。液膜到达离心转盘9边缘后分裂成液丝,再呈点状抛甩出,与空气撞击后形成雾滴,雾滴具有水平方向的初速度。
57.在函道风机风力、重力、空气阻力影响下,液滴由水平方运动开始向朝着斜下方运动;通过送风系统与静电喷头系统的结合,静电喷头系统将药液离心成均匀的雾滴,并使雾滴带上静电,提高了雾滴均匀性及沉积水平;由送风系统提供向下的风力将静电喷头系统
产生的雾滴抑制在一定的半径范围内,可有效防止雾滴的飘移。
58.如图6所示,基于上述无人机风送静电离心式喷雾系统,本发明实施例还提供了一种无人机风送静电离心式喷雾系统的控制方法,包括:
59.控制器用于获取无人机飞行速度及所处环境风速、风向数据;
60.第一无人机飞行速度超过第一预设速度的情况下:当无人机加速时,会导致雾滴向后漂移,此时控制器控制电机及涵道风机的转速相应增大,同时控制水泵压力增大;当无人机减速时,控制器控制电机及涵道风机的转速相应减小,同时控制水泵压力减小;从而可保持在无人机加减速过程中防止液滴飘移的同时保证施药量不变,从而更好地保障施药质量;
61.当无人机飞行速度低于第二预设速度的情况下:控制器控制水泵压力减少,并控制涵道风机和电机的转速不变,以保持喷幅不变且防止过量喷洒;
62.当无人机飞行速度处于第一预设速度和第二预设速度之间且无侧风的情况下,涵道风机转速、电机转速及水泵压力不随无人机飞行速度变化而变化;此时,涵道风机转速保持低转速以应对无人机下旋风场带来的漂移影响;
63.当检测到发生侧风情况时,控制器控制靠近侧风向的无人机风送静电离心式喷雾喷头的电机和涵道风机转速增大,远离侧风向的无人机风送静电离心式喷雾喷头的电机和涵道风机转速减小。可实现调整后的系统所喷液滴在侧风的影响下与预定喷洒轨迹接近。可事先通过模拟实验得到侧风风速与分别与两侧电机和涵道风机转速的变化关系曲线,然后在实施时根据该变化关系曲线及实时侧风风速控制两侧电机和涵道风机转速,通过该控制方案可实现调整后的系统所喷液滴在侧风的影响下与预定喷洒轨迹接近。
64.以上控制过程中,涵道风机1转速与电机(或离心转盘9)转速的平方对应的正比变化关系。
65.可以理解的是,上述各实施例中相同或相似部分可以相互参考,在一些实施例中未详细说明的内容可以参见其他实施例中相同或相似的内容。
66.流程图中或在此以其他方式描述的任何过程或方法描述可以被理解为,表示包括一个或更多个用于实现特定逻辑功能或过程的步骤的可执行指令的代码的模块、片段或部分,并且本发明的优选实施方式的范围包括另外的实现,其中可以不按所示出或讨论的顺序,包括根据所涉及的功能按基本同时的方式或按相反的顺序,来执行功能,这应被本发明的实施例所属技术领域的技术人员所理解。
67.尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。