1.本实用新型涉及一种纸箱的定位识别装置,具体涉及一种能够对于多层放置的纸箱板的凹口部位进行快速准确识别以方便用于后续进一步机械操作的装置结构。
背景技术:
2.纸箱是应用非常广泛的一种包装制品,按照材质的类型不同,可以分为瓦楞纸箱、单层纸板箱等,有各种规格和型号。
3.为了对于饮料、食品等物体进行盛装、存储和运输,一般需要把这些物品装入到纸箱内。而在纸箱的大批量的加工过程中,纸箱一般为压缩的平板结构,多层纸箱形成的平板结构为一组,然后一组平板结构的纸箱通过机械抓手、传送带的传送过程而进行移动、位置摆放、装运等工序。
4.如图1所示,在托盘6上放置了多层纸箱板1,每一层纸箱板1由多个纸箱板叠加而成,纸箱板1上具有多个缺口部位7,且上层纸箱板3相对于下层纸箱板4转动了180度之后进行重合放置,即上层纸箱板3与下层纸箱板4进行反向交叉放置会比较稳定。下层纸箱板4的缺口部位7由于在上层纸箱板3的压制遮蔽作用下就形成了凹口位2。为了完成上层纸箱3和下层纸箱板4之间的分离,通过机械手上设置的挑动件能够对于凹口位2进行挑动而使得上层纸箱板3与下层纸箱板4进行分离,这样后续就能更好地对于上层纸箱板3进行抓紧固定。然而,对于凹口位2的精准识别定位是一个较为困难的问题,机械手能够按照固定的运动路径把挑动件移动至凹口位2进行挑动操作,但是当托盘6上的多层纸箱板1放置的位置发生偏差后会造成凹口位2的位置发生偏差,因此就容易使得挑动件无法很好地插入到凹口位2内。
技术实现要素:
5.为解决上述技术中存在的问题,本实用新型提供一种能够对于凹口位进行精确位置识别定位的装置。
6.本实用新型提供的一种上箱机器人的多层纸箱板的凹口位识别定位装置,其包括固定块和移动组件;
7.所述固定块上设置有第一传感器、第二传感器和第三传感器,所述第一传感器在上侧,所述第二传感器和第三传感器在下侧,且所述第二传感器和第三传感器位于同一高度上,所述第二传感器和第三传感器之间形成间隔区域,所述间隔区域的正上方设置所述第一传感器。
8.上述方案的有益效果为:通过传感器的设置,能够对于凹口位进行精确的位置识别定位,当对于凹口位进行识别定位后就能够通过插头对于凹口位进行插入并且进行挑起操作,这样就能使得上层纸箱板和下层纸箱板进行分离,以便于对于上层纸箱板的夹紧动作。
9.所述移动组件与所述固定块连接,所述移动组件用于带动所述固定块进行位置移
动。
10.一个优选的方案是,所述间隔区域内设置插入头,所述插入头用于插入到识别的凹口位的内部。
11.一个优选的方案是,所述移动组件包括竖直方向的运动单元和水平方向的运动单元,所述竖直方向的运动单元和水平方向上的运动单元使得所述移动组件在三维空间内进行运动。
12.一个优选的方案是,所述竖直方向的运动单元为丝杆驱动的运动单元或者气缸驱动的运动单元,所述竖直方向的运动单元为丝杆驱动的运动单元或者气缸驱动的运动单元。
13.一个优选的方案是,所述第一传感器、第二传感器和第三传感器为雷达传感器、超声波传感器、激光距离触感器、反射式光电传感器、红外传感器。
附图说明
14.图1是现有技术中的托盘上放置有多层的纸箱板的结构示意图。
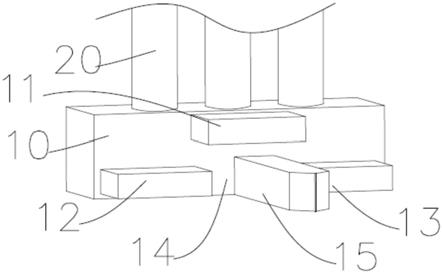
15.图2是本实用新型的上箱机器人的多层纸箱板的凹口位识别定位装置结构示意图。
16.图3是本实用新型的上箱机器人的多层纸箱板的凹口位识别定位装置结构示意图。
17.图4是本实用新型的上箱机器人的多层纸箱板的凹口位识别定位装置的传感器在对于凹口位进行位置识别过程中的示意图。
具体实施方式
18.第一实施例:
19.如图2至图4所示,本实施例的一种上箱机器人的多层纸箱板的凹口位识别定位装置,其包括固定块10和移动组件20。
20.固定块10上设置有第一传感器11、第二传感器12和第三传感器13,第一传感器11在上侧,第二传感器12和第三传感器13在下侧,且第二传感器12和第三传感器13位于同一高度上,第二传感器12和第三传感器13之间形成间隔区域14,间隔区域14的正上方设置第一传感器11。
21.移动组件20与固定块10连接,移动组件20用于带动固定块10进行位置移动。
22.在具体的识别过程中,移动组件20首先带动固定块10进行位置移动,使得移动组件20带动固定块10移动至两层纸箱板之间的位置,并且保持固定块10基本与某个凹口位2进行对齐,此时凹口位2与间隔区域14大致呈相对放置状态。然后进行距离微调,即通过移动组件20带动固定块10在凹口位2的左右进行轻微距离调整,当第二传感器12和第三传感器13移动至凹口位2的时候则探测到的信号会发生明显的变化,根据这种信号的明显的变化来精确判断凹口位2在水平方向上的精确位置,然后对于固定块10进行位置移动,进而使得间隔区域14与凹口位2进行精确对准。在竖直方向上,如图4所示,通过移动组件20带动固定块10和第一传感器11进行微小距离的上下移动,并且当第一传感器11移动至于凹口位2相对的位置的时候会发生探测信号的明显的变化,根据这种信号的明显的变化来准确判断
凹口位2的竖直方向的准确位置,根据竖直方向的准确位置对于固定块10进行竖直方向上的位置移动,进而使得间隔区域14和凹口位2进行竖直方向上的精确对准。
23.第二实施例:
24.优选地,本实施例的间隔区域14内设置插入头15,插入头15用于插入到识别的凹口位2的内部。当插入头15插入到凹口位2内并且进行挑起操作之后,则通过另外一个插头移送至挑起的上层纸箱板3的底部进行托起支撑,并且随后通过压紧板对于上层纸箱板3进行压紧固定,然后移送至其它的位置。
25.移动组件20包括竖直方向的运动单元和水平方向的运动单元,竖直方向的运动单元和水平方向上的运动单元使得移动组件20在三维空间内进行运动。竖直方向的运动单元为丝杆驱动的运动单元或者气缸驱动的运动单元,竖直方向的运动单元为丝杆驱动的运动单元或者气缸驱动的运动单元。
26.第一传感器11、第二传感器12和第三传感器13为雷达传感器、超声波传感器、激光距离触感器、反射式光电传感器、红外传感器。
技术特征:
1.一种上箱机器人的多层纸箱板的凹口位识别定位装置,其特征在于,包括:固定块,所述固定块上设置有第一传感器、第二传感器和第三传感器,所述第一传感器在上侧,所述第二传感器和第三传感器在下侧,且所述第二传感器和第三传感器位于同一高度上,所述第二传感器和第三传感器之间形成间隔区域,所述间隔区域的正上方设置所述第一传感器;移动组件,所述移动组件与所述固定块连接,所述移动组件用于带动所述固定块进行位置移动。2.根据权利要求1所述的上箱机器人的多层纸箱板的凹口位识别定位装置,其特征在于,所述间隔区域内设置插入头,所述插入头用于插入到识别的凹口位的内部。3.根据权利要求1所述的上箱机器人的多层纸箱板的凹口位识别定位装置,其特征在于,所述移动组件包括竖直方向的运动单元和水平方向的运动单元,所述竖直方向的运动单元和水平方向上的运动单元使得所述移动组件在三维空间内进行运动。4.根据权利要求3所述的上箱机器人的多层纸箱板的凹口位识别定位装置,其特征在于,所述竖直方向的运动单元为丝杆驱动的运动单元或者气缸驱动的运动单元。5.根据权利要求1所述的上箱机器人的多层纸箱板的凹口位识别定位装置,其特征在于,所述第一传感器、第二传感器和第三传感器为雷达传感器、超声波传感器、激光距离触感器、反射式光电传感器、红外传感器。
技术总结
本实用新型提供一种上箱机器人的多层纸箱板的凹口位识别定位装置,其包括固定块和移动组件;所述固定块上设置有第一传感器、第二传感器和第三传感器,所述第一传感器在上侧,所述第二传感器和第三传感器在下侧,且所述第二传感器和第三传感器位于同一高度上,所述第二传感器和第三传感器之间形成间隔区域,所述间隔区域的正上方设置所述第一传感器。通过传感器的设置,能够对于凹口位进行精确的位置识别定位,当对于凹口位进行识别定位后就能够通过插头对于凹口位进行插入并且进行挑起操作,这样就能使得上层纸箱板和下层纸箱板进行分离,以便于对于上层纸箱板的夹紧动作。以便于对于上层纸箱板的夹紧动作。以便于对于上层纸箱板的夹紧动作。
技术研发人员:刘方超 周炼军 周亚波 雷齐国 徐立民
受保护的技术使用者:可口可乐装瓶商生产(石家庄)有限公司
技术研发日:2021.09.23
技术公布日:2022/3/1
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。