1.本发明属于自动控制领域,具体涉及一种光电转塔对雷达识别目标区域的搜索扫描控制方法。
背景技术:
2.目前使用光电转塔配合雷达协同工作,是实现对空中区域目标进行昼夜搜索、跟踪、监视、识别的有效方式。光电转塔可以对准雷达探测的目标区域,探测雷达难以探测到的目标的轮廓特征和形态信息。
3.然而由于雷达给出的是目标可能出现的区域范围,这个范围往往不够精确。目前光电转塔的传感器长焦视场都非常小,难以覆盖整个目标区域范围,经常出现对准目标区域中心点后无法找到目标,因此现有的搜索方法是在光电转塔对准目标区域中心后如果未发现目标使用人工手动搜索方法继续在周边区域人工手动寻找目标,这样不但自动化程度低,耗费时间,而且由于目标位置是变化的,常常难以发现目标。
4.需要一种光电转塔对雷达识别目标区域的搜索扫描控制方法,可以根据转塔传感器的视场大小和雷达给出的目标可能范围自动计算扫描搜索扫描方式和搜索扫描参数,实现全自动搜索扫描,无需人为干预,可以保证雷达给出的整个目标可能出现区域范围都可以被扫描到。从而提高效率,减小错过目标的概率。
技术实现要素:
5.要解决的技术问题:
6.为了避免现有技术的不足之处,本发明提出一种光电转塔对雷达识别目标区域的搜索扫描控制方法,可以根据转塔传感器的视场大小和雷达给出的目标可能范围自动计算扫描搜索方式和搜索范围,实现全自动搜索扫描,无需人为干预。在雷达给出的目标区域范围不够精确时也能找到目标,可以保证雷达给出的整个目标区域范围都可以被扫描到。从而大大提高了效率,并减小了错过目标的概率。
7.本发明的技术方案是:一种光电转塔对雷达识别目标区域的搜索扫描控制方法,其特征在于具体步骤如下:
8.步骤一:当雷达发现目标后,将目标区域范围信息传输至光电转塔;
9.其中,雷达给出目标可能出现的区域中心点所对应的光电转塔方位角是θ
yaw
,光电转塔俯仰角为θ
pitch
;雷达给出的目标可能出现的区域的范围为方位方向为俯仰方向为当前的光电转塔的传感器的方位视场角η
yaw
和俯仰视场角η
pitch
;
10.步骤二:开始区域搜索扫描过程,需要根据雷达给出的目标区域范围和当前传感器视场范围切换扫描模式;并计算扫描参数,从而保证在目标区域不断变化的情况下也能保证整个目标区域范围都可以被扫描到。
11.本发明的进一步技术方案是:所述步骤一中,在雷达开始工作前需将光电转塔和雷达的角度进行对准和校正,把雷达给出的角度和光电转塔的光轴角度对应起来。
12.本发明的进一步技术方案是:所述步骤二中,扫描模式包括以下四种:
13.扫描模式一,雷达给出的目标区域范围小于光电转塔当前传感器视场,即且此时,光电转塔的方位俯仰角从动雷达给出的区域中心点所对应的方位俯仰角和即可;
14.扫描模式二,雷达给出的目标区域方位范围小于光电转塔当前传感器方位视场角大小,但目标区域俯仰范围大于光电转塔当前传感器俯仰视场角大小,即大小,但目标区域俯仰范围大于光电转塔当前传感器俯仰视场角大小,即光电转塔的方位角需要从动雷达给出的区域中心点所对应的方位角,光电转塔的俯仰方向需要进行扫描;
15.扫描模式三,雷达给出的目标区域俯仰范围小于光电转塔当前传感器俯仰视场角大小,但目标区域方位范围大于光电转塔当前传感器方位视场角大小,即大小,但目标区域方位范围大于光电转塔当前传感器方位视场角大小,即光电转塔的俯仰角需要从动雷达给出的区域中心点所对应的俯仰角,光电转塔的方位方向需要进行扫描;
16.扫描模式四,雷达给出的目标区域方位范围和俯仰范围均大于光电转塔当前传感器视场角大小即时,需要对目标区域采用区域逐行扫描方法。
17.本发明的进一步技术方案是:所述扫描模式二中,扫描的范围为至的区间,由于这个范围会随着目标位置变化而实时更新,扫描时需要实时计算扫描的边界值,光电转塔俯仰角触碰到边界值折返便可。
18.本发明的进一步技术方案是:所述扫描模式三中,扫描的范围为至的区间,这个范围会随着目标位置变化而实时更新,扫描时需要实时计算扫描的边界值,光电转塔俯仰角触碰到边界值折返便可。
19.本发明的进一步技术方案是:所述扫描模式二、扫描模式三中,扫描的初始方向根据雷达给出的目标运动方向而确定,从而提高发现目标速度。
20.本发明的进一步技术方案是:所述步骤二中,区域搜索扫描过程具体为:
21.步骤1:控制光电转塔方位角度对准θ
yaw
,俯仰角度对准
22.步骤2:开始在俯仰方向上进行扫描,向上扫描至俯仰角度再根据雷达给出的目标运动方向改变方位对准的角度为θ
yaw
0.8η
yaw
或θ
yaw-0.8η
yaw
;能够保证两次行扫描的视场有一定交叉范围,从而保证扫描到目标,且能够保证先扫描目标更可能出现的区域;
23.步骤3:转塔俯仰继续在到的范围内扫描,在俯仰扫描到俯仰范围的边界时,需要改变方位对准的角度,扫描过程中的方位对准的角度为:
24.ξ
yaw
=θ
yaw
0.8nη
yaw
25.其中n为整数,在触碰或超过到俯仰扫描边界时会发生变化。
26.本发明的进一步技术方案是:所述步骤3扫描过程中,要不断判断范围方位对准的角度是否超过雷达给出的目标区域方位的边界值,当时需要改变n的变化由增加改为变小,当需要改变n的变化由变小改为增加,这样能保证扫描区域略大于整个目标区域范围。
27.有益效果
28.本发明的有益效果在于:本发明用途是可以在雷达的配合下,控制光电转塔自动完成对低小慢目标的发现、自动跟踪监视、识别,实现全自动工作,无需手动操作,实现全天时、全天候、自动化的低小慢监视能力。
29.本发明可以根据转塔传感器的视场大小和雷达给出的目标可能范围,自动计算扫描搜索方式和搜索范围,扫描过程中通过扫描范围和方位对准角度的设定,实现了全自动搜索扫描,整个流程无需人为干预,可以保证雷达给出的整个目标可能出现区域都可以被扫描到。从而大大提高了效率,并减小了错过目标的概率。实际试验也证明,加快了目标的寻找速度,在雷达给出的目标范围不够精确时也能找到目标,并减小了错过目标的概率。这种方法解决了现有的人工手动搜索方法自动化程度低,耗费时间,经常错过目标的问题。
附图说明
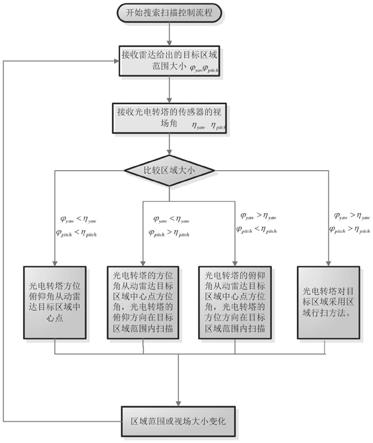
30.图1是本发明光电转塔光电转塔区域搜索扫描控制模式切换流程图;
31.图2是本发明光电转塔目标区域逐行扫描示意图。
具体实施方式
32.下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
33.参照图1、2所示,本发明一种光电转塔对雷达识别目标区域的搜索扫描控制方法如下:
34.在雷达的配合下,实现光电转塔对雷达识别目标区域的搜索扫描。首先光电转塔和雷达的角度需要进行对准和校正,把雷达给出的角度和光电转塔的光轴角度对应起来。然后光电转塔在雷达发现目标后接收雷达给出的目标区域范围信息。
35.雷达给出目标可能出现的区域中心点所对应的光电转塔方位角是θ
yaw
,光电转塔俯仰角为θ
pitch
;雷达给出的目标可能出现的区域的范围为方位方向为俯仰方向为还需要知道当前的光电转塔的传感器的方位视场角η
yaw
和俯仰视场角η
pitch
。
36.下面开始区域搜索扫描过程,需要根据雷达给出的目标区域范围和当前传感器视场范围切换扫描模式。
37.如果雷达给出的目标区域范围小于光电转塔当前传感器视场,即且时,此时光电转塔的方位俯仰角从动雷达给出的区域中心点所对应的方位俯仰
角和即可。
38.如果雷达给出的目标区域方位范围小于光电转塔当前传感器方位视场角大小,但目标区域俯仰范围大于光电转塔当前传感器俯仰视场角大小。即时。光电转塔的方位角需要从动雷达给出的区域中心点所对应的方位角,光电转塔的俯仰方向需要进行扫描,扫描的范围为至的区间,由于这个范围会随着目标位置变化而实时更新,扫描时需要实时计算扫描的边界值,光电转塔俯仰角触碰到边界值折返便可。扫描的初始方向可根据雷达给出的目标运动方向而确定,从而提高发现目标速度。
39.如果雷达给出的目标区域俯仰范围小于光电转塔当前传感器俯仰视场角大小,但目标区域方位范围大于光电转塔当前传感器方位视场角大小。即时。光电转塔的俯仰角需要从动雷达给出的区域中心点所对应的俯仰角,光电转塔的方位方向需要进行扫描,扫描的范围为至的区间,这个范围会随着目标位置变化而实时更新,扫描时需要实时计算扫描的边界值,光电转塔俯仰角触碰到边界值折返便可,扫描的初始方向可根据雷达给出的目标运动方向而确定,从而提高发现目标速度。
40.如果雷达给出的目标区域方位范围和俯仰范围均大于光电转塔当前传感器视场角大小即时,需要对目标区域采用区域逐行扫描方法。
41.首先,控制光电转塔方位角度对准θ
yaw
,俯仰角度对准然后开始在俯仰方向上进行扫描,向上扫描至俯仰角度之后需要根据雷达给出的目标运动方向改变方位对准的角度为θ
yaw
0.8η
yaw
或θ
yaw-0.8η
yaw
。这样能保证两次行扫描的视场有一定的交叉范围,从而保证能扫描到目标,且可以保证先扫描目标更可能出现的区域。之后转塔俯仰继续在到的范围内扫描,在俯仰扫描到俯仰范围的边界时,需要改变方位对准的角度,扫描过程中的方位对准的角度为:
42.ξ
yaw
=θ
yaw
0.8nη
yaw
43.其中n为整数且在触碰或超过到俯仰扫描边界时会发生变化。扫描过程中要不断判断范围方位对准的角度是否超过雷达给出的目标区域方位的边界值,当时需要改变n的变化由增加改为变小,当需要改变n的变化由变小改为增加,从而实现方位以合适的间隔逐行扫描。这个间隔需要略小于当前的传感器视场方位角(如当前的传感器视场方位角的0.8倍),从而保证两次行扫描的视场有一定的交叉范围,从而保证能扫描到目标。在俯仰对准值触碰或超过到俯仰扫描边界需要改变方位对准的角度增加或者减少的方向,这样保证扫描区域略大于整个目标可能出现的区域范围。
44.采用此种区域搜索扫描控制方法可以根据转塔传感器的视场大小和雷达给出的
目标可能范围自动计算扫描搜索模式和搜索范围参数,实现全自动搜索扫描,无需人为干预,可以保证雷达给出的整个目标可能出现区域都可以被扫描到。从而大大提高了目标搜索速度和效率,并减小了错过目标的概率。
45.尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在不脱离本发明的原理和宗旨的情况下在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。