1.本发明是有关于一种压缩机,且特别是有关于一种可变转速多级压缩机及其控制方法。
背景技术:
2.喘振现象是压缩机流体的流量减少到一定程度时所产生的一种周期性气流振荡现象。当喘振现象发生时,压缩机会产生振动,影响压缩机运作的稳定性,严重时可能会造成叶轮、轴承或其他元件的破损,导致压缩机发生不可逆的损害。
3.然而,传统上的防喘振判断技术,难以判断多级压缩机的哪一级叶轮即将发生喘振。此外,一般针对定频压缩机的控制方式虽然较为广用,但由于变频压缩机的各级性能数据变化较为复杂,若将一般定频压缩机的控制方式套用于可变转速多级压缩机中,控制器须投入数倍的计算时间及控制成本,在实务上可行性极低。而且,定频压缩机于低负载状态时无法降低转速,仅能靠容调机构降低流体流量,防喘振的调控效率较差。
技术实现要素:
4.本发明提出一种可变转速多级压缩机的控制方法及其压缩机,改善先前技术的问题。
5.本发明所提出的一种可变转速多级压缩机的控制方法包括:执行一信息预存步骤,将一压缩机的一第一级叶轮及一第二级叶轮的多个喘振安全裕度线信息预先储存于一控制器中;启动压缩机,控制器透过一变频驱动器控制压缩机运转;以及执行一工况判断步骤,控制器根据第一级叶轮及第二级叶轮的流量参数与压力参数计算出第一级叶轮及第二级叶轮的各一工作点和各工作点与对应的各一喘振安全裕度线之间的距离;其中,当侦测到第一级叶轮及第二级叶轮之中的任一工作点与对应的喘振安全裕度线之间的距离小于或等于零时,控制器启动一防喘振控制模式,控制器优先针对第一级叶轮或第二级叶轮进行一调节步骤,使工作点远离对应的喘振安全裕度线,移往稳定区。
6.在本发明的一实施例中,工况判断步骤之前,还包括执行一取得最适基准信息步骤,侦测第一级叶轮及第二级叶轮的各至少一流量调节装置的开度及压缩机的一转轴的转速;及控制器根据各流量调节装置的各开度与转轴的转速,计算出各一喘振线并获得其对应的各喘振安全裕度线。
7.在本发明的一实施例中,当控制器执行工况判断步骤后,则重新回到取得最适基准信息步骤。
8.在本发明的一实施例中,工况判断步骤还包括:当侦测到第一级叶轮及第二级叶轮中的各工作点与对应的各喘振安全裕度线之间的距离均大于零时,则重新回到取得最适基准信息步骤。
9.在本发明的一实施例中,工况判断步骤还包括:当侦测到第一级叶轮及第二级叶轮中的各工作点与对应的各喘振安全裕度线之间的距离均大于零时,则重新回到工况判断
步骤。
10.在本发明的一实施例中,流量参数为一冷媒的流量、蒸发温度、冷凝温度、过冷度、过热度、饱和温度、压缩机的制冷能力、负载温度或负载温差,而压力参数为压缩机的压比、第一级叶轮的压比或第二级叶轮的压比。
11.在本发明的一实施例中,调节步骤还包括:控制器调节第一级叶轮或第二级叶轮中对应的流量调节装置的开度及/或转轴的转速。
12.在本发明的一实施例中,调节步骤还包括:控制器调节至少一中压调节装置的开度,以调节压缩机和第二级叶轮的压比;其中,中压调节装置与控制器电性连接并且连通压缩机。
13.在本发明的一实施例中,调节步骤还包括:控制器调节至少一热气旁通装置的开度,以调节压缩机的压比、第一级叶轮的压比及第二级叶轮的压比,其中,热气旁通装置与控制器电性连接并且连通压缩机。
14.在本发明的一实施例中,压缩机还包括一马达,马达套设于转轴上,变频驱动器电性连接马达并控制马达和转轴的转速。
15.在本发明的一实施例中,第一级叶轮和第二级叶轮分别套设于转轴上,马达设置于第一级叶轮和第二级叶轮之间。
16.在本发明的一实施例中,该些流量调节装置包括:多个进气导叶,各进气导叶沿转轴长轴方向离设于马达且分别与第一级叶轮和第二级叶轮对应设置;及至少一扩压导叶,各扩压导叶沿转轴的径向方向与第一级叶轮及/或第二级叶轮对应设置。
17.在本发明的一实施例中,第一级叶轮和第二级叶轮分别套设于转轴上,第一级叶轮和第二级叶轮设置于马达的相同侧,且第二级叶轮设置于第一级叶轮和马达之间。
18.在本发明的一实施例中,该些流量调节装置包括:一进气导叶,进气导叶沿转轴长轴方向离设于马达且与第一级叶轮对应设置;至少一扩压导叶,扩压导叶沿转轴的径向方向与第一级叶轮对应设置;及至少一回流导叶,回流导叶沿转轴的径向方向与第二级叶轮对应设置。
19.本发明所提出的一种可变转速多级压缩机,包括一变频驱动器;一压缩机,包括一马达、一转轴、一第一级叶轮、一第二级叶轮及多个流量调节装置,马达与变频驱动器电性连接,马达、第一级叶轮和第二级叶轮分别套设于转轴上,该些流量调节装置分别配置于第一级叶轮和第二级叶轮邻近处;以及一控制器,与变频驱动器和该些流量调节装置电性连接,控制器透过变频驱动器来控制压缩机的马达运转;其中,控制器预先储存第一级叶轮及第二级叶轮的多个喘振安全裕度线信息,当启动压缩机时,控制器根据第一级叶轮及第二级叶轮的流量参数与压力参数计算出第一级叶轮及第二级叶轮的各一工作点和各工作点与对应的各喘振安全裕度线之间的距离,当侦测到第一级叶轮及第二级叶轮之中的任一工作点与对应的喘振安全裕度线之间的距离小于或等于零时,控制器启动一防喘振控制模式,控制器优先针对第一级叶轮或第二级叶轮进行调节,使工作点远离对应的喘振安全裕度线,移往稳定区。
20.在本发明的一实施例中,马达设置于第一级叶轮和第二级叶轮之间。
21.在本发明的一实施例中,该些流量调节装置包括多个进气导叶,各进气导叶沿转轴长轴方向离设于马达且分别与第一级叶轮和第二级叶轮对应设置;及至少一扩压导叶,
各扩压导叶沿转轴的径向方向与第一级叶轮及/或第二级叶轮对应设置。
22.在本发明的一实施例中,第一级叶轮和第二级叶轮设置于马达的相同侧,且第二级叶轮设置于第一级叶轮和马达之间。
23.在本发明的一实施例中,该些流量调节装置包括一进气导叶,进气导叶沿转轴长轴方向离设于马达且与第一级叶轮对应设置;至少一扩压导叶,扩压导叶沿转轴的径向方向与第一级叶轮对应设置;及至少一回流导叶,回流导叶沿转轴的径向方向与第二级叶轮对应设置。
24.在本发明的一实施例中,流量参数为一冷媒的流量、蒸发温度、冷凝温度、过冷度、过热度、饱和温度、压缩机的制冷能力、负载温度或负载温差,而压力参数为压缩机的压比、第一级叶轮的压比或第二级叶轮的压比。
25.在本发明的一实施例中,至少一中压调节装置,与控制器电性连接并且连通压缩机,其中,当控制器启动防喘振控制模式时,控制器调节中压调节装置的开度,以调节压缩机和第二级叶轮的压比。
26.在本发明的一实施例中,至少一热气旁通装置,与控制器电性连接并且连通压缩机,其中,当控制器启动防喘振控制模式时,控制器调节热气旁通装置的开度,以调节压缩机的压比、第一级叶轮的压比及第二级叶轮的压比。
27.综上所述,本发明的可变转速多级压缩机的控制方法是通过预存各级叶轮的多个喘振安全裕度线信息于控制器中,再依据实际侦测数据选出各级叶轮的最适基准信息,再依序比对并判断各级叶轮的实际工况状态,准确判断应优先对哪一级叶轮进行调整,进而提升多级压缩机的防喘振控制的效率及准确性。
附图说明
28.为让本发明的上述和其他目的、特征、优点与实施例能更明显易懂,所附附图的说明如下:
29.图1为本发明一实施例的可变转速多级压缩机的系统示意图;
30.图2a~2d为本发明一实施例所绘示的第一级叶轮及第二级叶轮的性能曲线与喘振线;
31.图3为本发明一实施例的可变转速多级压缩机的剖面图;
32.图4为本发明另一实施例的可变转速多级压缩机的剖面图;
33.图5为本发明一实施例的可变转速多级压缩机的控制方法的流程图;以及
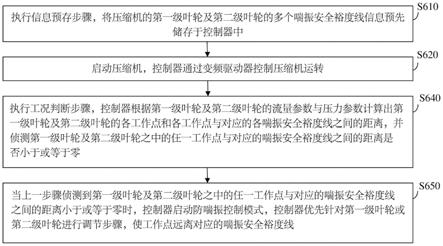
34.图6为本发明一实施例的可变转速多级压缩机的控制方法的流程图。
35.【符号说明】
36.为让本发明的上述和其他目的、特征、优点与实施例能更明显易懂,所附符号的说明如下:
37.1:压缩机
38.2:变频驱动器
39.3:控制器
40.4:冷凝器
41.5:蒸发器
42.6:节能器
43.7、10:膨胀装置
44.8:中压调节装置
45.9:热气旁通装置
46.11:第一级叶轮
47.12:第二级叶轮
48.13:马达
49.14:转轴
50.15:流量调节装置
51.210、210’:工作点
52.220、220’:喘振区
53.230、230’:稳定区
54.151:进气导叶
55.152:进气导叶
56.153:扩压导叶
57.154:扩压导叶
58.156:回流导叶
59.s610、s620、s630、s631、s632、s640、s641、s642、s643、s650、s651、
60.s652、s660:步骤
61.a、b、c、d:喘振线
62.a’、b’、c’、d’:喘振线
63.a1:喘振安全裕度线
64.a1’:喘振安全裕度线
65.m:可变转速多级压缩机
具体实施方式
66.图1为本发明一实施例的可变转速多级压缩机m的系统示意图;图3为本发明一实施例的可变转速多级压缩机m的剖面图;图4为本发明另一实施例的可变转速多级压缩机m的剖面图。
67.如图1所示,本发明一实施例的一种可变转速多级压缩机m的系统是由压缩机1、冷凝器4、膨胀装置7、10(如:膨胀阀或孔口板)及蒸发器5形成一冷媒循环系统。其中,冷凝器4与蒸发器5之间可设有一节能器6,使进入蒸发器5之前的高压气态冷媒的温度降低,达到提高冷媒的过冷度、增加蒸发器5的冷却能力。此外,冷媒循环系统的流路中,还可设置中压调节装置8及热气旁通装置9,用以调节行经的冷媒流量。
68.以下将详细介绍本发明的一种可变转速多级压缩机m的详细构造,请同时参照图1、图3及图4。可变转速多级压缩机m包括变频驱动器2、压缩机1以及控制器3。压缩机1包括马达13、转轴14、第一级叶轮11、第二级叶轮12及多个流量调节装置15。其中,马达13、第一级叶轮11和第二级叶轮12分别套设于转轴14上,且该些流量调节装置15分别配置于第一级叶轮11和第二级叶轮12邻近处。实际上,因应各种机型的设计需求,可改变第一级叶轮和第
二级叶轮与马达的位置关系。此外,马达13与变频驱动器2电性连接,控制器3与变频驱动器2和该些流量调节装置5电性连接,使控制器3可透过变频驱动器2来控制压缩机1的马达13运转,亦可使控制器3直接控制该些流量调节装置15的开度,以控制冷媒流量及压缩机1的性能及压比,进而达到压缩机1即时防喘振的需求。
69.请同时参照图1及图3,本实施例的可变转速多级压缩机m,马达13、第一级叶轮11和第二级叶轮12分别套设于转轴14上,且马达13设置于第一级叶轮11和第二级叶轮12之间。此外,本实施例的流量调节装置15分别配置于第一级叶轮11和第二级叶轮12邻近处。更进一步说明,流量调节装置15包括多个进气导叶151、152及至少一扩压导叶153、154,各进气导叶153、154沿转轴14长轴方向离设于马达13,且进气导叶151与第一级叶轮11对应设置,进气导叶152与第二级叶轮12对应设置。相对应的,各扩压导叶153沿转轴14的径向方向与第一级叶轮11对应设置,及/或扩压导叶154沿转轴14的径向方向与第二级叶轮12对应设置。实际上,因应不同的流场需求,可设计一组或多组扩压导叶153、154位于各级叶轮11、12的相对应处。
70.接续请参照图4,图4为另一实施例的可变转速多级压缩机m,其中马达13、第一级叶轮11和第二级叶轮12分别套设于转轴14上,且第一级叶轮11和第二级叶轮12设置于马达13的相同侧,第二级叶轮12设置于第一级叶轮11和马达13之间。此外,本实施例的流量调节装置15分别配置于第一级叶轮11和第二级叶轮12邻近处。更进一步说明,本实施例的流量调节装置15包括一进气导叶151、至少一扩压导叶153及至少一回流导叶156。其中,进气导叶151沿转轴14长轴方向离设于马达13且与第一级叶轮11对应设置,扩压导叶153沿转轴14的径向方向与第一级叶轮11对应设置,而回流导叶156沿转轴的径向方向与第二级叶轮12对应设置。实际上,因应不同的流场需求,可设计一组或多组扩压导叶153及/或回流导叶156位于各级叶轮11、12的相对应处。
71.上述二者实施例的可变转速多级压缩机m,为达到防喘振的目的,须于压缩机1运转前,控制器3预先储存第一级叶轮11及第二级叶轮12的多个喘振安全裕度线信息。实务上,各级叶轮11、12的多个喘振安全裕度线信息会以各至少一喘振安全裕度3d曲面信息的形式,将各级叶轮在不同工况时的各种喘振安全裕度线信息完整地储存于控制器中。
72.当启动压缩机1时,控制器3根据第一级叶轮11及第二级叶轮12的流量参数与压力参数计算出第一级叶轮11及第二级叶轮12的各一工作点和各工作点与对应的各一喘振安全裕度线之间的距离。其中,当侦测到第一级叶轮11及第二级叶轮12之中的任一工作点与对应的喘振安全裕度线之间的距离小于或等于零时,控制器3启动防喘振控制模式,控制器优先针对第一级叶轮11或第二级叶轮12进行调节,使工作点远离对应的喘振安全裕度线。
73.上述流量参数为冷媒的流量、蒸发温度、冷凝温度、过冷度、过热度、饱和温度、压缩机的制冷能力、负载温度或负载温差,而压力参数为压缩机的压比、第一级叶轮的压比或第二级叶轮的压比。
74.除此之外,为达到更优越的防喘振效果,可变转速多级压缩机m还包括至少一中压调节装置8与控制器3电性连接并且连通压缩机1,且中压调节装置8设置并连通于节能器6与第二级叶轮12的进气口之间。其中,当控制器3启动防喘振控制模式时,控制器3调节中压调节装置8的开度,以调节压缩机1和第二级叶轮12的压比。更进一步说明,控制器3可调节中压调节装置8的开度大小,当冷媒中压压力偏高时,控制器3缩小中压调节装置8的开度、
降低第一级叶轮11与第二级叶轮12之间的气态冷媒流量,进而达到降低压力的效果;同样地,若冷媒中压压力偏低,则控制器3增大中压调节装置8的开度,增加第一级叶轮11与第二级叶轮12之间的气态冷媒流量,进而达到增加压力的效果。其中,冷媒中压压力是指经第一级叶轮11压缩后且尚未进入第二级叶轮12及进气导叶152的冷媒压力。
75.同样地,可变转速多级压缩机m还包括至少一热气旁通装置9与控制器3电性连接并且连通压缩机1,且热气旁通装置设置9并连通于冷凝器4与蒸发器5之间。其中,当控制器3启动防喘振控制模式时,控制器3调节热气旁通装置9的开度,以调节压缩机的压比、第一级叶轮11的压比及第二级叶轮12的压比。更进一步说明,控制器3可调节热气旁通装置9的开度,当冷凝压力过高或蒸发压力过低时,控制器3开启热气旁通装置9的开度,使冷凝器4部分高压气态冷媒经由热气旁通装置9流回蒸发器5,使冷凝压力下降、蒸发压力上升,以达到减小压缩机1压比的效果。
76.值得注意的是,为了对喘振安全裕度线做更进一步的阐述,请同时参照图1、2a~2d,图2a~2d是依照本发明一实施例所绘示的第一级叶轮11及第二级叶轮12的性能曲线与喘振线。压缩机1根据实际测试数据计算出第一级叶轮11的性能曲线与喘振线a~d及第二级叶轮12的性能曲线与喘振线a’~d’,再根据各级喘振线a~d、a’~d’往各级稳定区230、230’平移安全裕度,产生喘振安全裕度线。实务上,不同进气导叶151、152开度会有不同的喘振线a~d、a’~d’。
77.接续,将各级喘振安全裕度线的方程序输入控制器3,压缩机1运转时,持续定时侦测各级流量参数(x轴)与压力参数(y轴),控制器3计算出各级工作点210、210’碰触对应的各级喘振安全裕度线时a1、a1’,即执行防喘振控制模式,调整转轴14的转速、冷媒流量(如:调整流量调节装置15中的进气导叶151、152、扩压导叶153、154或回流导叶156)、压比(如:控制中压调节装置8),使工作点210、210’离开喘振安全裕度线a1、a1’,往各级稳定区230、230’移动,避免落于各级喘振区220、220’。前述控制仍无法使工作点210、210’移至稳定区230、230’时,则控制装器3调控热气旁通装置9的开度以防止喘振发生。
78.请同时再参照图5及图6,将更进一步详述本发明的一种可变转速多级压缩机m的控制方法,其中该控制方法为适用于上述描述的可变转速多级压缩机m的任一实施例中,详细的结构在此不赘述。此外,在本实施例中所提及的步骤,除特别叙明其顺序者外,均可依实际需要调整其前后顺序,甚至可同时或部分同时执行。
79.步骤s610,于压缩机1运转前执行信息预存步骤,将压缩机的第一级叶轮11及第二级叶轮12的多个喘振安全裕度线信息预先储存于控制器3中;在实务上,各级叶轮11、12的多个喘振安全裕度线信息会以各至少一喘振安全裕度3d曲面信息的形式,将各级叶轮在不同工况时的各种喘振安全裕度线信息完整地储存于控制器3中。
80.步骤s620,启动压缩机1,使控制器3透过变频驱动器2控制压缩机1开始运转。
81.当压缩机1开始运转后,执行步骤s630,控制器3执行取得最适基准信息步骤,先侦测第一级叶轮11及第二级叶轮12的各至少一流量调节装置15的开度及压缩机1的转轴14的转速;接续,控制器3根据各流量调节装置15的各开度与转轴14的转速,计算出各一喘振线a、a’并获得其对应的各喘振安全裕度线a1、a1’。
82.更进一步说明,在执行步骤s630控制器执行取得最适基准信息步骤时,须先执行步骤s631,侦测第一级叶轮11的各至少一进气导叶151的开度,其中进气导叶151的开度会
影响进入第一级叶轮11中的流冷媒量;以及侦测第二级叶轮12的各至少一进气导叶152的开度,其中进气导叶152的开度会影响进入第二级叶轮12中的流冷媒量;同时或接续,再侦测压缩机1的转轴14的转速。
83.接续执行步骤s632,控制器3根据进气导叶151的开度与转轴14的转速,计算出与第一级叶轮11实际工况相对应的一喘振线a(或如图2a中喘振线a~d其中之一,本实施例以其简化后的图2c中喘振线a为例),并获得与喘振线a对应的喘振安全裕度线a1。此外,控制器3亦根据进气导叶152的开度与转轴14的转速,计算出与第二级叶轮12实际工况相对应的一喘振线a’(或如图2b中喘振线a’~d’其中之一,本实施例以其简化后的图2d中喘振线a’为例),并获得与喘振线a’对应的喘振安全裕度线a1’。于实务上,控制器3会针对进气导叶151、152的不同开度,计算出不同的喘振线及相对应的喘振安全裕度线。
84.取得最适基准信息步骤之后,控制器3执行工况判断步骤s640;控制器3根据第一级叶轮11及第二级叶轮12的流量参数与压力参数计算出第一级叶轮11及第二级叶轮12的各一工作点210、210’和各工作点210、210’与对应的各一喘振安全裕度线a1、a1’之间的距离d1、d2。其中,当侦测到第一级叶轮11及第二级叶轮12之中的任一工作点210、210’与相对应的喘振安全裕度线a1、a1’之间的距离d1、d2小于或等于零时,控制器3则启动防喘振控制模式,控制器优先针对第一级叶轮11或第二级叶轮12进行调节步骤,使工作点210、210’远离对应的喘振安全裕度线a1、a1’。
85.上述的流量参数为冷媒的流量、蒸发温度、冷凝温度、过冷度、过热度、饱和温度、压缩机的制冷能力、负载温度或负载温差,而压力参数为压缩机的压比、第一级叶轮的压比或第二级叶轮的压比。
86.更进一步说明,在执行步骤s640执行工况判断步骤时,控制器会先执行步骤s641,控制器3根据第一级叶轮11当下工况的流量参数与压力参数计算出第一级叶轮11的一工作点210,以及工作点210与对应的一喘振安全裕度线a1之间的距离d1,此距离d1的大小可反映第一级叶轮11当下工况。同样地,控制器3根据第二级叶轮12当下工况的流量参数与压力参数计算出第二级叶轮12的一工作点210’,以及工作点210’与对应的一喘振安全裕度线a1’之间的距离d2,此距离d2的大小可反映第二级叶轮当下工况。
87.更进一步说明,根据步骤s642,当侦测到第一级叶轮11的工作点210与相对应的喘振安全裕度线a1之间的距离d1小于或等于零时,控制器3会立即启动防喘振控制模式,控制器3会优先针对第一级叶轮11进行调节步骤s651,使第一级叶轮11的工作点210远离对应的喘振安全裕度线a1,避免第一级叶轮11发生喘振。此外,当控制器3针对第一级叶轮11进行调节步骤s651后,控制器3则续行步骤s643,接续判断第二级叶轮12的工况。相反地,当控制器3侦测到第一级叶轮11的工作点210与相对应的喘振安全裕度线a1之间的距离d1大于零时,控制器3则直接续行步骤s643,接续判断第二级叶轮12的工况。
88.承上述步骤s643,当控制器3侦测到第二级叶轮12的工作点210’与相对应的喘振安全裕度线a1’之间的距离d2小于或等于零时,控制器3会立即启动防喘振控制模式,控制器3会优先针对第二级叶轮12进行调节步骤s652,使第二级叶轮的工作点210’远离对应的喘振安全裕度线a1’,避免第二级叶轮12发生喘振。此外,当控制器3针对第二级叶轮12进行调节步骤s652后,控制器3则重新回到取得最适基准信息步骤s630,以因应已进行调节步骤的第一级叶轮11及/或第二级叶轮12,再次取得两级叶轮11、12的最适基准信息。相反地,当
侦测到第二级叶轮12的工作点210’与相对应的喘振安全裕度线a1’之间的距离d2大于零时,通过步骤s660,控制器3则重新回到取得最适基准信息步骤s630,以因应已进行调节步骤的第一级叶轮11,再次取得两级叶轮11、12的最适基准信息。
89.除此之外,启动防喘振控制模式的调节步骤s650还包括如步骤s651所示,控制器3调节第一级叶轮11中对应的流量调节装置15的开度,具体而言,控制器3调节进气导叶151及/或扩压导叶153的开度以调节第一级叶轮11的工况,使第一级叶轮11的工作点210与相对应的喘振安全裕度线a1之间的距离d1距离变大。同样地,如步骤s652所示,控制器3调节第二级叶轮12中对应的流量调节装置15的开度,具体而言,控制器3调节进气导叶152、扩压导叶154及/或回流导叶156的开度以调节第二级叶轮的工况,使第二级叶轮的工作点210’与相对应的喘振安全裕度线a1’之间的距离d2距离变大。
90.此外,启动防喘振控制模式的调节步骤s650还可包括,控制器3透过变频驱动器2调整马达13及转轴14的转速,进而同时调控第一级叶轮11及第二级叶轮12的流量参数与压力参数。
91.除了上述的调节方式,为达到更优越的防喘振效果,本实施例的启动防喘振控制模式的调节步骤s650还可包括,控制器3调节至少一中压调节装置8的开度,以调节压缩机1和第二级叶轮12的压比。具体而言,控制器3可调节中压调节装置8的开度大小,当冷媒中压压力偏高时,控制器3缩小中压调节装置8的开度、降低第一级叶轮11与第二级叶轮12之间的气态冷媒流量,进而达到降低压力的效果;同样地,若冷媒中压压力偏低,则控制器3增大中压调节装置15的开度,增加第一级叶轮11与第二级叶轮12之间的气态冷媒流量,进而达到增加压力的效果。其中,冷媒中压压力是指经第一级叶轮11压缩后且尚未进入第二级叶轮12及进气导叶152的冷媒压力。
92.同样地,本实施例的启动防喘振控制模式的调节步骤s650还可包括,控制器3调节至少一热气旁通装置9的开度,以调节压缩机1的压比、第一级叶轮11的压比及第二级叶轮11的压比。更进一步说明,控制器3可调节热气旁通装置9的开度,当冷凝压力过高或蒸发压力过低时,控制器3开启热气旁通装置的开度,使冷凝器4部分高压气态冷媒经由热气旁通装置9流回蒸发器5,使冷凝压力下降、蒸发压力上升,以达到减小压缩机1压比的效果。
93.值得注意的是,于本实施例中,控制器3以依序判断第一级叶轮11及第二级叶轮12当下的工况为例,但不以此为限制。控制器3于执行步骤s641取得后取得距离d1、d2后,亦可同时执行步骤s642、s643,控制器3会同时判断第一级叶轮11与第二级叶轮12当下的工况,也就是控制器3会同时判断上述距离d1、d2是否小于等于零,若距离d1或距离d2两者或其中之一小于等于零时,控制器3会同时针对该级叶轮11、12进行调节。
94.最后,当控制器执行工况判断步骤s640、s641、s642、s643及启动防喘振控制模式的调节步骤s650后,通过步骤s660,控制器3则重新回到取得最适基准信息步骤s630,以因应已进行调节步骤的第一级叶轮11及/或第二级叶轮12,侦测两级叶轮11、12的流量调节装置15的当下开度及转轴14的当下转速,以再次取得两级叶轮11、12的最适基准信息作为后续比对基础。
95.此外,若控制器3未对第一级叶轮11及第二级叶轮12进行调节时,也就是当侦测到第一级叶轮11及第二级叶轮12中的各工作点210、210’与对应的各喘振安全裕度线a1、a1’之间的距离d1、d2均大于零时,通过步骤s660,控制器3可重新回到取得最适基准信息步骤
s630,或是直接重新回到工况判断步骤s640,以增加控制器运算的效率,减少对第一级叶轮11及第二级叶轮12的工况进行侦测及调节的时间。
96.综上所述,本发明的可变转速多级压缩机m的控制方法是通过预存各级叶轮11、12的多个喘振安全裕度线信息于控制器3中,再依据实际侦测数据选出各级叶轮11、12的最适基准信息,再依序或同时比对并判断各级叶轮11、12的实际工况状态,准确判断应优先对哪一级叶轮进行调整,进而提升可变转速多级压缩机m的防喘振控制的效率及准确性。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。