技术特征:
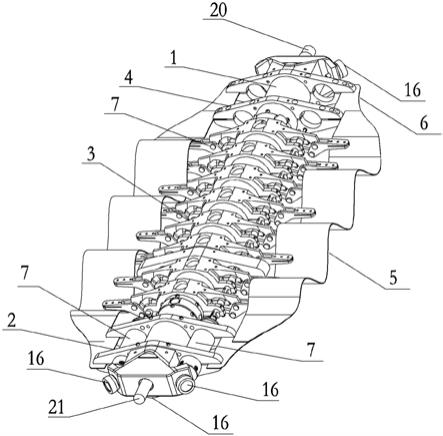
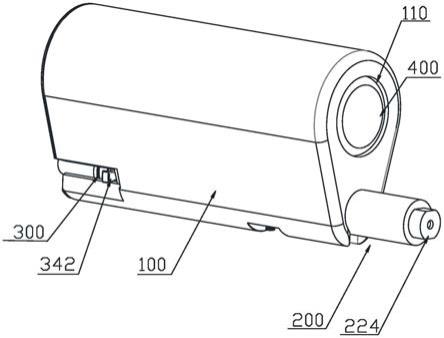
1.一种条鳍推进仿生水下机器人结构,其特征在于:包括具有中轴线的主控制舱,所述主控制舱上设置有主支撑框架,所述主支撑框架上设置有两排摆动机构,两排所述摆动机构沿所述中轴线对称,每排所述摆动机构上均安装有柔性鳍,所述主支撑框架上还安装有水密电机,所述水密电机与所述摆动机构的动力输入端连接。2.根据权利要求1所述的一种条鳍推进仿生水下机器人结构,其特征在于:所述主支撑框架包括沿中轴线依次设置的头部支撑框架、中部支撑框架以及尾部支撑框架,所述头部支撑框架与所述尾部支撑框架上均安装有一对导流稳定板,同对所述导流稳定板沿所述中轴线对称,所述摆动机构安装在所述中部支撑框架上,所述水密电机通过所述头部支撑框架安装在所述主控制舱上。3.根据权利要求2所述的一种条鳍推进仿生水下机器人结构,其特征在于:所述摆动机构包括曲轴、曲臂、l型的摆臂以及摆臂连接架,所述曲臂转动安装在所述曲轴的连杆轴颈上,所述曲臂的另一端与所述摆臂铰接,所述柔性鳍安装在所述摆臂的另一端,所述曲轴转动安装在所述中部支撑框架上,所述曲轴的转轴平行于所述中轴线,所述水密电机的转轴与所述曲轴的动力输入端连接,所述摆臂连接架安装在所述中部支撑框架的外壁上,且位于所述曲轴的一侧,所述摆臂连接架的另一端与所述摆臂的弯曲处铰接,所述摆臂的弯曲处的内角背向所述摆臂连接架。4.根据权利要求3所述的一种条鳍推进仿生水下机器人结构,其特征在于:所述中部支撑框架由若干中部抱箍组成,所述中部抱箍环抱在所述主控制舱上,且沿所述中轴线均布,所述中部抱箍由一对半圆环组成,所述半圆环的两端均一体成型有夹臂,位于所述中轴线同侧的所述夹臂通过螺栓连接,所述曲轴通过所述夹臂转动安装在所述半圆环上,所述夹臂上开设有容纳连杆曲颈的缺口,所述摆臂连接架通过螺栓安装在所述半圆环上,位于所述中轴线同侧的所述导流稳定板通过对应的所述柔性鳍连接。5.根据权利要求3或4所述的一种条鳍推进仿生水下机器人结构,其特征在于:所述曲轴由若干段组成,且相邻两段通过销钉连接,每段所述曲轴上均设置一个连杆曲颈。6.根据权利要求2所述的一种条鳍推进仿生水下机器人结构,其特征在于:所述头部支撑框架与所述尾部支撑框架均由两对夹板组成,每对所述夹板均通过螺栓连接,并夹持在所述主控制舱上,所述导流稳定板与所述水密电机均通过对应的所述夹板夹持在所述主控制仓上。7.根据权利要求2所述的一种条鳍推进仿生水下机器人结构,其特征在于:还包括两瓣壳体,两瓣所述壳体相互扣合,所述主控制舱、所述头部支撑框架、所述中部支撑框架以及所述尾部支撑框架均位于扣合的所述壳体内,所述柔性鳍与所述导流稳定板均位于扣合的所述壳体外。8.根据权利要求7所述的一种条鳍推进仿生水下机器人结构,其特征在于:位于所述主控制舱底部的所述壳体上设置有两组传感器安装点位,两组所述传感器安装点位分别位于所述主控制舱的两端,每组所述传感器安装点位由三个安装位组成,每组的三个安装位均绕所述中轴线均布。9.根据权利要求1所述的一种条鳍推进仿生水下机器人结构,其特征在于:所述主控制舱由头部浮舱、中部控制舱以及尾部浮舱组成。
技术总结
本实用新型涉及仿生机器人技术领域,公开了一种条鳍推进仿生水下机器人结构,它包括具有中轴线的主控制舱,主控制舱上设置有主支撑框架,主支撑框架上设置有两排摆动机构,两排摆动机构沿中轴线对称,每排摆动机构上均安装有柔性鳍,主支撑框架上还安装有水密电机,水密电机与摆动机构的动力输入端连接。本实用新型的有益效果是:可广泛应用在水下考古、海洋科考、水产养殖、水下侦查、水下巡逻等多种应用场景,同时采用仿生柔性驱动,相关运动驱动平滑,涡流小,减少边际损失,提高了推进效率,降低了噪音。低了噪音。低了噪音。
技术研发人员:熊治荣
受保护的技术使用者:西安智荣机电科技有限公司
技术研发日:2021.10.26
技术公布日:2022/2/25
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。