1.本实用新型涉及转向轮的技术领域,尤其涉及一种清洁机器人转向机构。
背景技术:
2.现有工厂内的清洁机器人对地面进行清洗时,需要设置清洁机器人转向机构,使清洁机器人能转动,这样才能应对不同的工况,在要碰撞时也可以转弯。但现有转向轮存在控制方向不精准,易造成清洁机器人不灵活缺陷。
技术实现要素:
3.本实用新型提供一种清洁机器人转向机构,解决现有清洁机器人转向轮存在控制方向不精准的问题。能提高转向控制精度,增加清洁机器人的灵活性和工作效率。
4.为实现以上目的,本实用新型提供以下技术方案:
5.一种清洁机器人转向机构,包括:转向轴、伺服电机、同步轮、传动齿轮、转向齿轮和转轮装置;
6.所述转向轴与所述伺服电机的传动轴平行设置,并在端部设置有同步轮,使所述转向轴与所述伺服电机通过同步带传动连接;
7.所述转向齿轮设置在所述转轮装置的上方,用于调节所述转轮装置转动方向和角度;
8.所述传动齿轮设置在所述转向轴上,并与所述转向齿轮啮合传动,在所述伺服电机转动时,驱动所述转向轴按设定方向转动,所述转向齿轮在所述传动齿轮的带动下按设定角度转动,以控制所述转轮装置的转向角度。
9.优选的,所述转轮装置包括:转向轮、轮架和轮轴;
10.所述轮架上设置所述轮轴,所述轮轴上套设有所述转向轮,所述转向齿轮设置在所述轮架的顶面上。
11.优选的,所述轮架为门形结构,所述轮轴贯穿在所述轮架两侧。
12.优选的,所述转轮装置还包括:轴固定螺丝和轮固定螺丝;
13.所述轮轴的两端设有螺纹结构,所述轴固定螺丝和所述轮固定螺丝螺纹连接在所述轮轴端部上,所述轮固定螺丝处于所述轮架内侧面一侧,所述轴固定螺丝处于所述轮架外侧面一侧,使所述轮轴通过所述轴固定螺丝和所述轮固定螺纹与所述轮架的两侧固定连接。
14.优选的,所述转轮装置还包括:固定销;
15.所述轮轴上设有所述固定销,所述转向轮设有固定销孔,所述转向轮套设在所述轮轴时通过所述固定销固定。
16.优选的,所述转轮装置还包括:固定轴和转动轴;
17.所述转动轴垂直固定在所述轮架的顶面上,所述转向齿轮套设在所述转动轴上,并在所述转向齿轮两侧设置有齿轮垫片;
18.所述转动轴的端部设有固定孔,所述固定轴的一端通过所述固定孔与所述转动轴套接,所述固定轴的另一端与清洁机器人底部固定连接,在所述转向齿轮转动时,所述轮架绕所述固定轴转动。
19.优选的,还包括:转向控制器;
20.所述转向控制器与所述伺服电机信号连接,所述转向控制器用于控制所述伺服电机的转动角度。
21.优选的,还包括:视觉感应装置;
22.所述视觉感应装置与所述转向控制器信号连接,用于对清洁机器人的周边地面进行视觉图像采集和识别,并在地面存在障碍物时发送转向指令给所述转向控制器。
23.优选的,所述视觉感应装置包括:摄像头、图像采集模块和图像识别模块;
24.所述图像采集模块分别与所述摄像头和所述图像识别模块信号连接,所述图像采集模块用于对所述摄像头的拍摄图像进行图像采集,所述图像识别模块用于对图像进行特征提取并根据特征进行障碍物识别。
25.优选的,所述转向控制器为微处理器。
26.本实用新型提供一种清洁机器人转向机构,采用伺服电机带动转向轴上的传动齿轮,以使与所述传动齿轮啮合的转向齿轮转动,进而调整转轮装置的转向角度。解决现有清洁机器人转向轮存在控制方向不精准的问题。能提高转向控制精度,增加清洁机器人的灵活性和工作效率。
附图说明
27.为了更清楚地说明本实用新型的具体实施例,下面将对实施例中所需要使用的附图作简单地介绍。
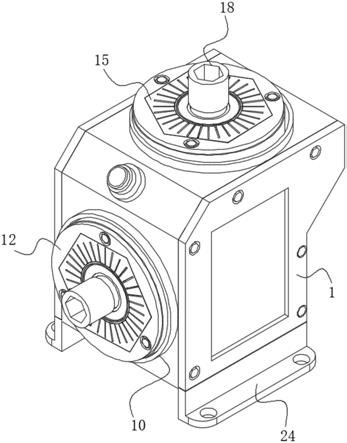
28.图1是本实用新型提供的一种清洁机器人转向机构的示意图。
29.图2是本实用新型提供的转轮装置的爆炸示意图。
30.图3是本实用新型提供的转轮装置的结构示意图。
具体实施方式
31.为了使本技术领域的人员更好地理解本实用新型实施例的方案,下面结合附图和实施方式对本实用新型实施例作进一步的详细说明。
32.针对当前清洁机器人的转向轮存在转向控制不精准的问题。本实用新型提供一种清洁机器人转向机构,采用伺服电机带动转向轴上的传动齿轮,以使与所述传动齿轮啮合的转向齿轮转动,进而调整转轮装置的转向角度。解决现有清洁机器人转向轮存在控制方向不精准的问题。能提高转向控制精度,增加清洁机器人的灵活性和工作效率。
33.如图1~3所示,一种清洁机器人转向机构,包括:转向轴2、伺服电机1、同步轮(图中未示出)、传动齿轮4、转向齿轮5和转轮装置6。所述转向轴2与所述伺服电机1的传动轴平行设置,并在端部设置有同步轮,使所述转向轴2与所述伺服电机1通过同步带3传动连接。所述转向齿轮5设置在所述转轮装置6的上方,用于调节所述转轮装置6转动方向和角度。所述传动齿轮4设置在所述转向轴2上,并与所述转向齿轮5啮合传动,在所述伺服电机转动时,驱动所述转向轴按设定方向转动,所述转向齿轮在所述传动齿轮的带动下按设定角度
转动,以控制所述转轮装置的转向角度。
34.具体地,伺服电机通过同步轮、同步带控制转向轴的转动方向,由转向轴通过传动齿轮将需要转动方向以及角度的大小传递给转向齿轮,进而控制转轮装置进行转向,可实现原地360度转向。其中,伺服电机可固定在清洁机器人的底板上,所述转向轴的一端贯穿过清洁机器人的底板,并将传动齿轮设置在转向轴的端部上。本机构能解决现有清洁机器人转向轮存在控制方向不精准的问题。能提高转向控制精度,增加清洁机器人的灵活性和工作效率。
35.如图2所示,所述转轮装置6包括:转向轮63、轮架61和轮轴62。所述轮架61上设置所述轮轴62,所述轮轴62上套设有所述转向轮63,所述转向齿轮5设置在所述轮架61的顶面上。
36.进一步,所述轮架为门形结构,所述轮轴62贯穿在所述轮架61两侧。
37.如图2所示,所述转轮装置6还包括:轴固定螺丝64和轮固定螺丝65。所述轮轴62的两端设有螺纹结构,所述轴固定螺丝64和所述轮固定螺丝65螺纹连接在所述轮轴62端部上,所述轮固定螺丝65处于所述轮架61内侧面一侧,所述轴固定螺丝64处于所述轮架61外侧面一侧,使所述轮轴62通过所述轴固定螺丝64和所述轮固定螺纹65与所述轮架61的两侧固定连接。
38.如图2所示,所述转轮装置6还包括:固定销66;所述轮轴62上设有所述固定销66,所述转向轮设有固定销孔,所述转向轮套设在所述轮轴时通过所述固定销固定。
39.如图2所示,所述转轮装置还包括:固定轴68和转动轴67。所述转动轴67垂直固定在所述轮架61的顶面上,所述转向齿轮5套设在所述转动轴67上,并在所述转向齿轮5两侧设置有齿轮垫片69。所述转向轴的端部设有固定孔,所述固定轴68的一端通过所述固定孔与所述转动轴67套接,所述固定轴68的另一端与清洁机器人底部固定连接,在所述转向齿轮转动时,所述轮架绕所述固定轴转动。
40.该机构还包括:转向控制器(图中未示出);所述转向控制器与所述伺服电机信号连接,所述转向控制器用于控制所述伺服电机的转动角度。
41.在实际应用中,转向控制器还接收转向指令,并根据转向指令控制伺服电机通过同步轮、同步带控制转向轴的转动方向,转动角度以及角度的大小。
42.该机构还包括:视觉感应装置(图中未示出);所述视觉感应装置与所述转向控制器信号连接,用于对清洁机器人的周边地面进行视觉图像采集和识别,并在地面存在障碍物时发送转向指令给所述转向控制器。
43.进一步,所述视觉感应装置包括:摄像头、图像采集模块和图像识别模块。所述图像采集模块分别与所述摄像头和所述图像识别模块信号连接,所述图像采集模块用于对所述摄像头的拍摄图像进行图像采集,所述图像识别模块用于对图像进行特征提取并根据特征进行障碍物识别。
44.更进一步,所述转向控制器为微处理器。所述微处理器可为单片机。
45.可见,本实用新型提供一种清洁机器人转向机构,采用伺服电机带动转向轴上的传动齿轮,以使与所述传动齿轮啮合的转向齿轮转动,进而调整转轮装置的转向角度。解决现有清洁机器人转向轮存在控制方向不精准的问题。能提高转向控制精度,增加清洁机器人的灵活性和工作效率。
46.以上依据图示所示的实施例详细说明了本实用新型的构造、特征及作用效果,以上所述仅为本实用新型的较佳实施例,但本实用新型不以图面所示限定实施范围,凡是依照本实用新型的构想所作的改变,或修改为等同变化的等效实施例,仍未超出说明书与图示所涵盖的精神时,均应在本实用新型的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。