1.本实用新型涉及水面船水下机器人布放回收技术领域,具体为一种组合式船用水下机器人快速布放回收机构。
背景技术:
2.水下机器人的种类有rov、uuv等,其用途较广泛,如可以用于水下安装施工,以及水下供电、检测、通讯中继、物资补给、应急救援、协同控制、探测打捞,甚至可用于水下故障装备维修、水下巡逻、水下潜伏攻击等特殊用途,水下机器人的普及程度代表了一个国家或企业的海洋装备应用能力水平。在水下机器人使用中存在许多安全影响因素,如水下机器人的水面安全布放和快速回收。当前水下机器人的水面船布放采用水面支持船上吊车吊放入水,水下机器人布放时需要安全布放入水并脱钩;回收时需要对机器人吊钩穿线,起吊回收机器人,回收穿线常用小艇人工穿线,在海况差或涌浪大时,小艇接近机器人时会与水下机器人发生碰撞,极易损伤水下机器人,特别是机器人的舵板或是鳍板。而对没有吊车的水面船(或码头)则不能进行较大水下机器人的吊放回收,为此,我们提出一种组合式船用水下机器人快速布放回收机构。
技术实现要素:
3.本实用新型的目的在于提供一种组合式船用水下机器人快速布放回收机构,以解决上述背景技术中提出的问题。
4.为实现上述目的,本实用新型提供如下技术方案:
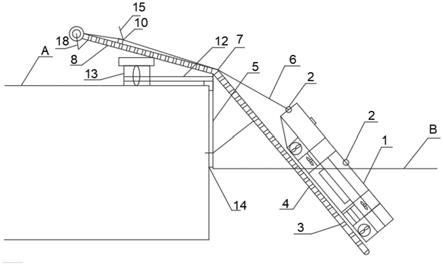
5.一种组合式船用水下机器人快速布放回收机构,包括水下机器人、船板(a)和水面(b),所述水下机器人沉降于水面b的内部,所述水下机器人的右侧与顶部均安装有机器人吊钩,所述船板(a)的顶部设置有船面滑道,所述船板(a)的右侧设置有入水滑道,所述船面滑道与入水滑道的内腔均安装有第一滚筒,所述第一滚筒与水下机器人的左侧接触,所述船板(a)的右侧固定连接有船舷,所述船舷的右侧固定连接有船舷支撑架,所述船舷支撑架的右侧与入水滑道的左侧连接,所述机器人吊钩的表面绕设有机器人吊绳,所述入水滑道与船面滑道之间安装有转向滑轮,所述船面滑道顶部的左侧安装有导向滑轮,所述导向滑轮的顶部安装有辅助手柄,所述机器人吊绳与导向滑轮绕接,所述船面滑道的左端安装有电控卷扬机,所述船板(a)顶部的右侧安装有船面支撑架,所述船面支撑架的左侧固定连接有液压升降车,所述入水滑道与船面滑道底部的两侧均固定连接有船面滑道支架,两个所述船面滑道支架相邻的一侧均固定连接有滑道横向固定结构,所述第一滚筒的内腔转动连接有滚筒支撑杆结构,所述滚筒支撑杆结构与滑道横向固定结构固定连接,两个所述滑道横向固定结构相邻的一端均固定连接有滑道中间结构。
6.优选的,所述滑道横向固定结构的顶部的两侧均固定连接有滑道双侧主结构,所述滑道双侧主结构内腔的两侧均固定连接有滚筒斜支撑,所述滚筒斜支撑的表面与第一滚筒转动连接,所述船面滑道支架的底部固定连接有滑道组合连接结构。
7.优选的,所述船舷支撑架包括角钢或槽钢,所述角钢或槽钢的内腔固定连接有支撑螺钉,所述支撑螺钉的底部固定连接有支撑片,所述支撑螺钉与支撑片的表面均套设有滚轮。
8.优选的,所述机器人吊钩的表面开设有吊钩穿线槽口,所述吊钩穿线槽口的内部开设有吊钩内孔结构。
9.优选的,所述入水滑道的顶部安装有穿线器手柄,所述穿线器手柄的右端固定连接有穿线器端头,所述穿线器端头的右侧安装有拉绳固定端,所述穿线器手柄表面的左侧固定连接有拉绳固定结构,所述穿线器端头的右侧开设有拉绳导向槽,所述拉绳导向槽的内腔贯穿安装有穿引绳。
10.优选的,所述船面滑道和入水滑道的结构均为一致,均含有滑道双侧主结构、滚筒支撑杆结构、滑道中间结构、滚筒斜支撑和滑道组合连接结构,且所述吊钩穿线槽口安装在水下机器人的顶部、前方或是后方,吊钩穿线槽口的槽口向上或是向后。
11.与现有技术相比,本实用新型的有益效果是:
12.一、水面船可以不具有吊车,也可以布放回收水下机器人,降低了水下机器人使用中对保障船的要求,同时也可以在码头边布施回收水下机器人;
13.二、水面船人工穿线快速安全,不用借助小艇靠近水下机器人即可进行水下机器人吊钩穿线回收;
14.三、吊放回收安全性较好,一般不会损伤水下机器人,吊放回收用的滑道也可以用于船面开展机器人调试及装配,有利于水下机器人普及应用,并可拓展应用于其它水下物品打捞回收。
附图说明
15.图1为本实用新型整体结构示意图;
16.图2为本实用新型的滑道双侧主结构结构示意图;
17.图3为本实用新型的滑道中间结构结构示意图;
18.图4为本实用新型的支撑螺钉结构示意图;
19.图5为本实用新型的机器人吊钩结构示意图;
20.图6为本实用新型的拉绳固定结构结构示意图。
21.图中:1、水下机器人;2、机器人吊钩;3、第一滚筒;4、入水滑道;5、船舷支撑架;6、机器人吊绳;7、转向滑轮;8、船面滑道;10、导向滑轮;11、电控卷扬机;12、船面支撑架;13、液压升降车;14、船舷;15、辅助手柄;16、船面滑道支架;17、滑道横向固定结构;18、滚筒支撑杆结构;19、滑道中间结构;20、滑道双侧主结构;21、滚筒斜支撑;22、滑道组合连接结构;23、角钢或槽钢;24、滚轮;25、支撑螺钉;26、支撑片;27、吊钩穿线槽口;28、吊钩内孔结构;29、穿线器手柄;30、穿线器端头;31、拉绳固定端;32、拉绳固定结构;33、拉绳导向槽;34、穿引绳;a、船板;b、水面。
具体实施方式
22.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的
实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
23.请参阅图1、图2、图3、图4、图5和图6,本实用新型提供一种技术方案:
24.一种组合式船用水下机器人快速布放回收机构,包括水下机器人1、船板a和水面b,水下机器人1沉降于水面b的内部,水下机器人1的右侧与顶部均安装有机器人吊钩2,船板a的顶部设置有船面滑道8,船板a的右侧设置有入水滑道4,船面滑道8与入水滑道4的内腔均安装有第一滚筒3,第一滚筒3与水下机器人1的左侧接触,船板a的右侧固定连接有船舷14,船舷14的右侧固定连接有船舷支撑架5,船舷支撑架5的右侧与入水滑道4的左侧连接,机器人吊钩2的表面绕设有机器人吊绳6,入水滑道4与船面滑道8之间安装有转向滑轮7,船面滑道8顶部的左侧安装有导向滑轮10,导向滑轮10的顶部安装有辅助手柄15,机器人吊绳6与导向滑轮10绕接,船面滑道8的左端安装有电控卷扬机11,船板a顶部的右侧安装有船面支撑架12,船面支撑架12的左侧固定连接有液压升降车13,入水滑道4与船面滑道8底部的两侧均固定连接有船面滑道支架16,两个船面滑道支架16相邻的一侧均固定连接有滑道横向固定结构17,第一滚筒3的内腔转动连接有滚筒支撑杆结构18,滚筒支撑杆结构18与滑道横向固定结构17固定连接,两个滑道横向固定结构17相邻的一端均固定连接有滑道中间结构19。
25.请参阅图4,滑道横向固定结构17的顶部的两侧均固定连接有滑道双侧主结构20,滑道双侧主结构20内腔的两侧均固定连接有滚筒斜支撑21,滚筒斜支撑21的表面与第一滚筒3转动连接,船面滑道支架16的底部固定连接有滑道组合连接结构22,水下机器人在滑道上移动时阻力小,滚筒斜支撑滚筒斜支撑21和滑道双侧主结构滑道双侧主结构20相互作用能限定水下机器人在滑道上;
26.请参阅图4,船舷支撑架5包括角钢或槽钢23,角钢或槽钢23的内腔固定连接有支撑螺钉25,支撑螺钉25的底部固定连接有支撑片26,支撑螺钉25与支撑片26的表面均套设有滚轮24;
27.请参阅图5,机器人吊钩2的表面开设有吊钩穿线槽口27,吊钩穿线槽口27的内部开设有吊钩内孔结构28;
28.请参阅图6,入水滑道4的顶部安装有穿线器手柄29,穿线器手柄29的右端固定连接有穿线器端头30,穿线器端头30的右侧安装有拉绳固定端31,穿线器手柄29表面的左侧固定连接有拉绳固定结构32,穿线器端头30的右侧开设有拉绳导向槽33,拉绳导向槽33的内腔贯穿安装有穿引绳34,能够在完成机器人吊放回收工作后,机器人机器人吊绳6能方便退出穿吊钩内孔结构28,穿线器手柄29的长度适当,如4米,拉绳固定端31用于固定拉绳一端,拉绳固定结构32用于穿线器手柄固定拉绳,防止拉绳松驰,拉绳导向槽33用于穿引绳34,方便穿引绳进入吊钩穿线槽口27,必要时也可以在吊钩穿线槽口27设置弹簧扣阻止机器人吊绳6滑出,或是穿引绳34较细,而机器人吊绳6较粗,不易从吊钩穿线槽口27滑出,由于操作人员在较稳定的平台上,穿线动作灵活方便,有利于对机器人吊钩快速穿线;
29.请参阅图2,船面滑道8和入水滑道4的结构均为一致,均含有滑道双侧主结构20、滚筒支撑杆结构18、滑道中间结构19、滚筒斜支撑21和滑道组合连接结构22,且吊钩穿线槽口27安装在水下机器人的顶部、前方或是后方,吊钩穿线槽口27的槽口向上或是向后;
30.工作原理:本实用新型的吊钩穿线槽口27安装在水下机器人的顶部、头部中心位
置,必要时后部也可安装,吊钩穿线槽口27的槽口向上、或是高后,其形状方便穿线器快速穿线,在起吊布放和回收时机器人吊绳6不会脱出吊钩,完成机器人吊放回收工作后,机器人吊绳6能方便退出吊钩内孔结构28,且穿线器手柄29的长度适当,如4米,拉绳固定端31用于固定拉绳一端,拉绳固定结构32用于穿线器手柄固定拉绳,防止拉绳松驰,拉绳导向槽33用于固定穿引绳34,方便穿引绳进入吊钩穿线槽口27,必要时也可以在吊钩穿线槽口27设置弹簧扣阻止机器人吊绳6滑出,或是穿引绳34较细,而机器人吊绳6较粗,不易从吊钩穿线槽口27滑出,由于操作人员在较稳定的平台上,穿线动作灵活方便,有利于对机器人吊钩快速穿线。
31.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。