1.本发明涉及一种集成式的无人艇布放回收装置。
背景技术:
2.随着水面无人装备在行业中茁壮发展,搭载工作已经从满足单台套的专项任务,逐渐向满足批量搭载,实现综合性、组合化的任务需求转变。近年来,国内水面无人装备的功能和性能研发,取得了诸多成果,但其与对应收放装置的适配性、与母船间的搭载情况研究相对进展滞后。
3.随着无人艇集群化、快速布置等使用需求的提出,原单台套无人小艇布放回收技术经过多年使用认证,虽已经比较成熟。单逐一适配的特点仍无法满足新搭载使用的要求。
技术实现要素:
4.本发明的目的是为了解决以上现有技术的不足,提供一种集成式的无人艇布放回收装置。
5.一种集成式的无人艇布放回收装置,包括综合模块、转运模块与控制模块,所述的综合模块包括存储单元体,存储单元体上设有伸缩臂滑道,伸缩臂滑道内设有伸缩臂,伸缩臂包括油缸组系,油缸组系通过连杆机构与分段臂体相连,存储单元体的下方设有船体滑轨与变幅机构,存储单元体通过变幅机构进行与水平面之间的倾斜角度调节,所述的转运模块包括转运小车与固定托架,转运小车设于船体滑轨之间,转运小车上设有液压起降机构,固定托架设于综合模块后的无人艇存放区,固定托架上设有若干艘无人艇,所述的控制模块包括存储模块电源、泵站、移动马达与伸缩马达。
6.作为进一步改进,所述的存储单元体为矩形钢管焊接相连的框架。
7.作为进一步改进,所述的存储模块电池设于存储单元体上,存储模块电池通过电路与移动马达和伸缩马达相连。
8.作为进一步改进,所述的移动马达与转运小车相连。
9.作为进一步改进,所述的伸缩马达与伸缩臂相连。
10.作为进一步改进,所述的船体滑轨上设有船体固定装置。
11.有益效果:
12.本发明设计巧妙,采用模块化设计,各组件间有机组合可以满足不同船型,不同任务需求;提升搭载布放工作效率,装置采用通用一体化设计,对外接口少,便于运输安装;机构具有可调性,可同时满足多种类、不同尺寸水面无人装备的布放与回收。
附图说明
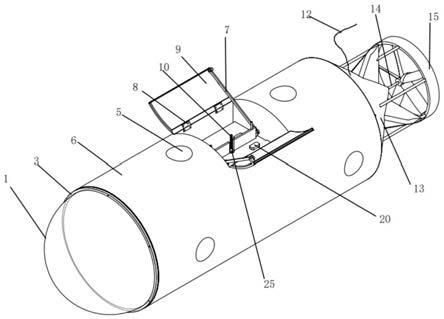
13.图1是一种集成式的无人艇布放回收装置的总体结构示意图;
14.图2是综合模块的结构示意图;
15.图3实无人艇的布放状态图;
16.1.综合模块2.转运模块3.控制模块4.存储单元体5.伸缩臂滑道6.伸缩臂7.油缸组系8.连杆机构9.分段臂体10.船体滑轨。
具体实施方式
17.为了加深对本发明的理解,下面将结合实施例和附图对本发明作进一步详述,该实施例仅用于解释本发明,并不构成对本发明保护范围的限定。
18.如图1~3所示,一种集成式的无人艇布放回收装置,包括综合模块1、转运模块2、控制模块3、存储单元体4、伸缩臂滑道5、伸缩臂6、油缸组系7、连杆机构8、分段臂体9和船体滑轨10。
19.在需要释放无人艇时,操作员a接通存储模块电源,启动泵站,解除伸缩臂6滑道5的固定,通过控制移动马达驱动转运小车携带无人艇移动至释放工作区;操作人员a控制变幅机构托起综合模块1,在确认安全可安全释放后,解除船体滑轨10的船体固定装置,无人艇自动滑落释放。
20.在首条无人艇移动释放的同时,操作人员b可控制转运模块2的转运小车移动至母船无人艇存放区,运送后续无人艇至释放工作区外等待。转运小车具有液压起降功能,通过高度变化,使存放中的无人艇脱离固定托架。
21.首条无人艇释放成功后,操作人员a控制变幅机构回落综合模块1,随后操作人员b控制在外等待的转运小车将后续无人艇送至存储单元体4的伸缩臂6上。操作人员a开启船体固定装置后再次控制变幅机构起升准备释放无人艇。依次循环,可实现多条无人艇的逐一布放任务。释放完成后,操作人员可控制综合模块1回释放区外等待,并开启船体固定装置。
22.当无人艇完成任务,需要回收操作时,操作员a接通综合模块1电源,启动泵站;解除存储单元体4的船体固定装置,通过控制移动马达移动至释放工作区;操作人员控制伸缩马达伸出伸缩臂6,伸缩臂6上有两组油缸,操作油缸使分段臂体9沉降并形成v形开口,便于无人艇回收时的导向校正。操作人员a控制油缸组系7伸出,使分段臂体9通过连杆机构8下降至水面,并张开头部臂体,形成v形开口。
23.无人艇驶入伸缩臂6形成的回收范围,操作员a控制油缸组系7回缩,伸缩臂6首部v形开口形成对无人艇的夹持,连杆机构8带动分段臂体9托举起无人艇至脱离水面。操作人员控制伸缩马达回收伸缩臂6,使无人艇至船体固定装置上。至此回收动作结束,操作员b可根据需要,操作转运小车逐一对回收上来的无人艇进行转运操作。
24.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
技术特征:
1.一种集成式的无人艇布放回收装置,其特征在于,包括综合模块、转运模块与控制模块,所述的综合模块包括存储单元体,存储单元体上设有伸缩臂滑道,伸缩臂滑道内设有伸缩臂,伸缩臂包括油缸组系,油缸组系通过连杆机构与分段臂体相连,存储单元体的下方设有船体滑轨与变幅机构,存储单元体通过变幅机构进行与水平面之间的倾斜角度调节,所述的转运模块包括转运小车与固定托架,转运小车设于船体滑轨之间,转运小车上设有液压起降机构,固定托架设于综合模块后的无人艇存放区,固定托架上设有若干艘无人艇,所述的控制模块包括存储模块电源、泵站、移动马达与伸缩马达。2.根据权利要求1所述的一种集成式的无人艇布放回收装置,其特征在于,所述的存储单元体为矩形钢管焊接相连的框架。3.根据权利要求1所述的一种集成式的无人艇布放回收装置,其特征在于,所述的存储模块电池设于存储单元体上,存储模块电池通过电路与移动马达和伸缩马达相连。4.根据权利要求1所述的一种集成式的无人艇布放回收装置,其特征在于,所述的移动马达与转运小车相连。5.根据权利要求1所述的一种集成式的无人艇布放回收装置,其特征在于,所述的伸缩马达与伸缩臂相连。6.根据权利要求1所述的一种集成式的无人艇布放回收装置,其特征在于,所述的船体滑轨上设有船体固定装置。
技术总结
本发明公开了一种集成式的无人艇布放回收装置,包括综合模块、转运模块与控制模块,所述的综合模块包括存储单元体,存储单元体上设有伸缩臂滑道,伸缩臂滑道内设有伸缩臂,伸缩臂包括油缸组系,油缸组系通过连杆机构与分段臂体相连,存储单元体的下方设有船体滑轨与变幅机构,存储单元体通过变幅机构进行与水平面之间的倾斜角度调节,所述的转运模块包括转运小车与固定托架,转运小车设于船体滑轨之间,转运小车上设有液压起降机构,固定托架设于综合模块后的无人艇存放区,固定托架上设有若干艘无人艇,所述的控制模块包括存储模块电源、泵站、移动马达与伸缩马达。移动马达与伸缩马达。移动马达与伸缩马达。
技术研发人员:赵明清
受保护的技术使用者:中船绿洲镇江船舶辅机有限公司
技术研发日:2021.11.18
技术公布日:2022/2/24
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。