1.本发明属于水下机器人技术领域,具体涉及一种可实现水下装备收放的鱼雷型潜器。
背景技术:
2.鱼雷型潜器,能完成水下观察、测量、检测等工作,当所述鱼雷型潜器在活动范围较小,环境复杂的观测区域时,水下作业很难完成。
技术实现要素:
3.本发明的目的在于提供一种可实现水下装备收放的鱼雷型潜器。
4.本发明的目的通过如下技术方案来实现:潜体整体呈鱼雷形状,包括潜器头部、潜器舱体和潜器尾部;所述的潜器舱体内部通过隔板分割为前舱、中舱和尾舱,在前舱和中舱之间、中舱和尾舱之间均开设有纵向导流通道,在前舱尾部和尾舱前部均开设有横向导流通道;所述的横向导流通道和纵向导流通道中均布置有水下推进器,水下推进器固定在导流通道的中心处;所述的潜器头部包括半球罩,半球罩通过固定环与前舱前端连接;所述的前舱内设有电子仓,电子仓通过舱管固定环固定在前舱前端;所述的电子仓的仓盖通过水密插件与脐带缆连接,脐带缆与潜器外部的控制台连接,电子仓内部设有控制面板和摄像头;所述的摄像头焊接在控制面板上,控制面板通过固定架固定在电子仓前端;所述的中舱顶部设有舱盖,中舱内部设有载物升降机构;所述的载物升降机构包括载物升降平台、丝杆和支座;所述的支座布置在中舱底部,在支座上安装有第一防水电机;所述的载物升降平台底面通过导向柱与支座连接,在载物升降平台顶面上设有防水电磁铁和连杆连接轴;所述的丝杆下端穿过载物升降平台,并通过联轴器与防水电机连接,丝杆与载物升降平台之间通过圆法兰螺母连接;所述的舱盖通过合页与中舱舱壁连接,舱盖通过连杆与载物升降平台上的连杆连接轴连接;所述的潜器尾部包括尾部螺旋桨、尾舱罩和尾部螺旋桨护板;所述的尾舱罩与尾舱后端连接,在尾舱罩内部设有尾舱支架,在尾舱支架上安装有第二防水电机;所述的尾部螺旋桨护板安装在尾舱罩外侧;所述的尾部螺旋桨设置在尾部螺旋桨护板内,尾部螺旋桨通过传动轴和联轴器与尾舱罩内的第二防水电机连接。
5.本发明的有益效果在于:
6.本发明提供了一种可实现水下装备收放的鱼雷型潜器,可以搭载小型水下观测机器人,当鱼雷型潜器活动范围受到限制时,通过升降收放装置可以完成对小型水下观测机器人的收放,以达到联合作业完成水下观察、测量、检测等工作。本发明能针对性的解决因水下空间狭小而不能完成作业的诸多问题,通过严谨的机械结构完成对所需搭载的物品的储存、释放、回收,控制灵活、工作可靠,适合作为其他水下机器人的收放装置,可联合多种类型水下机器人共同作业。
附图说明
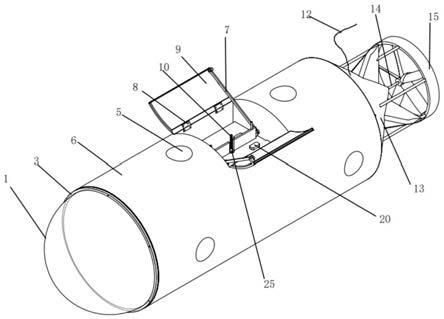
7.图1为本发明的总体外形示意图。
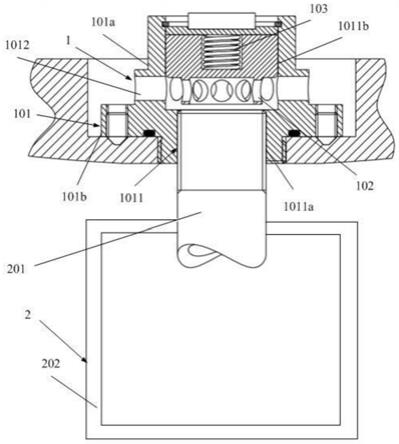
8.图2为本发明的主剖视图。
具体实施方式
9.下面结合附图对本发明做进一步描述。
10.本发明的目的是提供一种可实现水下装备收放的鱼雷型潜器,该潜器可以搭载小型水下观测机器人,当鱼雷型潜器活动范围受到限制时,通过升降收放装置可以完成对小型水下观测机器人的收放,以达到联合作业完成水下观察、测量、检测等工作。
11.一种可实现水下装备收放的鱼雷型潜器,包括潜器头部、潜器舱体6和潜器尾部;所述的潜器舱体内部通过隔板分割为前舱、中舱和尾舱,在前舱和中舱之间、中舱和尾舱之间均开设有纵向导流通道,在前舱尾部和尾舱前部均开设有横向导流通道;所述的横向导流通道和纵向导流通道中均布置有水下推进器11,水下推进器固定在导流通道5的中心处;
12.所述的潜器头部包括半球罩1,半球罩通过固定环3与前舱前端连接;
13.所述的前舱内设有电子仓2,电子仓通过舱管固定环4固定在前舱前端;所述的电子仓的仓盖26通过水密插件24与脐带缆12连接,脐带缆与潜器外部的控制台连接,电子仓内部设有控制面板28和摄像头29;所述的摄像头焊接在控制面板上,控制面板通过固定架27固定在电子仓前端;
14.所述的中舱顶部设有舱盖9,中舱内部设有载物升降机构;所述的载物升降机构包括载物升降平台21、丝杆10和支座22;所述的支座布置在中舱底部,在支座上安装有第一防水电机;所述的载物升降平台底面通过导向柱23与支座连接,在载物升降平台顶面上设有防水电磁铁20和连杆连接轴;所述的丝杆下端穿过载物升降平台,并通过联轴器与防水电机连接,丝杆与载物升降平台之间通过圆法兰螺母25连接;所述的舱盖通过合页8与中舱舱壁连接,舱盖通过连杆7与载物升降平台上的连杆连接轴连接;
15.所述的潜器尾部包括尾部螺旋桨16、尾舱罩13和尾部螺旋桨护板15;所述的尾舱罩与尾舱后端连接,在尾舱罩内部设有尾舱支架19,在尾舱支架上安装有第二防水电机18;所述的尾部螺旋桨护板安装在尾舱罩外侧;所述的尾部螺旋桨设置在尾部螺旋桨护板内,尾部螺旋桨通过传动轴14和联轴器17与尾舱罩内的第二防水电机18连接。
16.舱门通过连杆直接与升降平台连接,不需要单独设置开关舱门的装置。
17.与现有技术相比,本发明的有益效果是:
18.本发明能针对性的解决因水下空间狭小而不能完成作业的诸多问题,通过严谨的机械结构完成对所需搭载的物品的储存、释放、回收,控制灵活、工作可靠,适合作为其他水下机器人的收放装置,可联合多种类型水下机器人共同作业。
19.实施例1:
20.如图1所示,一种可实现水下装备收放的鱼雷型潜器,由鱼雷型潜器储存机构、控制机构、动力机构三部分组成。
21.控制机构包含一个电子仓2,一条脐带缆12。动力机构包含六个水下推进器11,两个防水电机18,一个联轴器17,一节传动轴14,一个尾部螺旋桨16。
22.储存机构包含储存舱和载物升降机构。载物升降机构由载物升降平台21,导向柱
23,丝杆10,圆法兰螺母25,联轴器17,防水电磁铁20,防水电机18及支座22组成。储存舱由亚克力半球罩1,固定环3,舱体6,舱盖9,合页8,连杆7,导流通道5,尾部螺旋桨护板15组成。电子仓2中安装有摄像头29、控制面板28、水密插件24、固定架27。所述的摄像头29焊接在控制面板28上,控制面板28通过固定架27固定在电子仓2前端。所述的水密插件24通过电子仓盖26通孔固定在电子仓盖26上,并连接脐带缆12;电子仓2通过脐带缆12与控制台连接,并实现电能和信号传输。所述的电子仓2通过舱管固定环4固定在储存舱前端。载物升降机构用于举升、回收物品,并将物品储存在储存舱中。
23.动力机构由水下推进器11、防水电机18、导流通道5、传动轴14、尾部螺旋桨16、联轴器17组成,水下推进器11和防水电机18通过螺丝分别固定在导流通道5中心和尾舱支架19上,传动轴14一端通过联轴器17与防水电机18连接,并由联轴器17张紧螺栓固定,传动轴14另一端与尾部螺旋桨16连接。所述的动力机构用于实现鱼雷型潜器的多自由度移动。
24.舱体6被隔板分为前舱,中舱,尾舱,亚克力半球罩1通过固定环3与前舱连接,并由螺丝固定。
25.前舱设有两条导流通道5,分别于圆柱形舱体6纵向和横向对称,并在尾舱中设有与中舱对称的两条相同的导流通道5;舱盖9上设有连杆连接轴,用于舱盖9与连杆7连接。舱盖9通过合页8与储存舱连接。
26.载物升降机构由载物升降平台21,导向柱23,丝杆10,圆法兰螺母25,联轴器17,防水电磁铁20,防水电机18及支座22组成,其中载物升降平台21的中心及对称两端加工有通孔,用于固定圆法兰螺母25及导向柱23导向。载物升降平台21两端设有连杆连接轴,用于载物升降平台21和连杆7连接。防水电磁铁20通过防水胶粘在载物升降平台21上,圆法兰螺母25通过螺钉固定于载物升降平台21中心。载物升降平台21通过圆法兰螺母25与丝杆10连接,丝杆10底端通过联轴器17与防水电机18连接,并由联轴器17张紧螺栓固定;支座22中心加工有通孔,用于固定防水电机18,防水电机18通过螺栓固定在支座22上并由支座22提供上下限位。所述的导向柱23穿过载物升降平台21两端通孔并由支座22提供上下限位;支座22通过螺钉固定与鱼雷型潜器储存机构的储存舱中舱底部。
27.以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。