用于电动工具的具有旋转磁传感器的非接触式触发器
1.相关申请的交叉引用
2.本技术要求于2019年5月13日提交的申请号为62/847,103的美国临时专利申请以及于2019年7月3日提交的申请号为62/870,353的美国临时专利申请的优先权,其全部内容通过引用并入本文。
技术领域
3.本文描述的实施方式涉及用于电子电动工具的触发器或其他用户输入。
技术实现要素:
4.输入装置(例如电动工具上的触发器)可以物理联接到一个或多个电子部件(例如可变电阻器、继电器等)。输入装置(包括触发器)上的物理连接可能会随着时间的推移而磨损,从而缩短工具的使用寿命。因此,利用非接触式感测装置来减少输入装置和/或电动工具的磨损并增加其寿命将是有利的。
5.在一个实施方式中,一种用于电动工具的触发器组件包括壳体;从壳体的表面延伸的可移动柱塞,可移动柱塞包括设置在壳体的外部的第一端和设置在壳体的内部的第二端。触发器组件还包括联接到可移动柱塞的第一端的触发器套;以及臂,其包括可移动地连接到可移动柱塞的第二端的第一侧和联接到磁体的第二侧。触发器组件还包括传感器,其被配置为感测磁体的磁场。触发器套的运动使磁体旋转并改变由传感器感测的磁场。
6.上述触发器组件的传感器可被配置为电连接到电动工具的控制器,并且控制器可被配置为控制电动工具的输出。
7.上述触发器组件的传感器还可被配置为基于感测到的磁场向控制器输出信号。
8.上述触发器组件的传感器的输出可以是指示触发器套的位置的电压。
9.上述的触发器组件,其中,磁体可以是被配置为基于臂的运动而旋转的环形磁体。
10.上述的触发器组件,其中,传感器可被配置为响应于环形磁体旋转而感测环形磁体的磁场的变化。
11.上述的触发器组件还可包括设置在壳体的表面上的选择器。触发器组件还可包括销,其包括可与选择器接合的第一端和联接到选择器磁体的第二端;以及选择器传感器,其被配置为感测选择器磁体的磁场。选择器的轴向运动可被配置为使选择器磁体旋转,从而改变由传感器感测的磁场。
12.上述的触发器组件,其中,选择器传感器可被配置为感测选择器磁体的极性,并基于感测到的极性将数字信号输出到控制器。
13.上述的触发器组件,其中,控制器可被配置为基于从选择器传感器接收的数字信号执行从电动工具的多个操作模式中选择的操作模式。
14.上述的触发器组件,其中,电动工具的多个操作模式可包括正向操作模式和反向操作模式。
15.在一个附加实施方式中,描述了根据一些实施方式的一种用于控制电子电动工具
的输出的方法。该方法包括沿第一线性方向致动电子电动工具的触发器套,其中,触发器套的致动沿第一线性方向移动可移动柱塞。该方法还包括将可移动柱塞的线性运动转换为可移动臂沿第一旋转方向的旋转运动,以及沿第一旋转方向旋转联接到可移动臂的环形磁体。该方法还包括在第一磁传感器处感测由环形磁体产生的磁场的参数,以及将旋转磁场的参数转换为输出电压。该方法还包括在电子电动工具的控制器处接收输出电压,以及基于接收到的输出电压控制电子电动工具的输出。
16.上述方法还可包括电子电动工具的输出是转速。
17.上述方法还可包括感测到的参数是磁通密度矢量分量。
18.上述方法还可包括第一磁传感器是模拟旋转磁场传感器。
19.上述方法还可包括在第二磁传感器处感测由环形磁体产生的磁场的参数,其中,第二磁传感器是数字磁传感器。
20.上述方法还可包括基于控制器接收到第二磁传感器的输出来启动控制器的唤醒过程。
21.在另一个实施方式中,描述了一种电动工具。电动工具包括触发器组件。触发器组件包括触发器套,其被配置为在第一线性方向上被致动,其中,触发器套的致动在第一线性方向上移动可移动柱塞。触发器组件还包括可移动臂,其被配置为将可移动柱塞的线性运动转换为可移动臂在第一旋转方向上的旋转运动,可移动臂还被配置为在第一旋转方向上旋转联接到可移动臂的环形磁体。触发器组件还包括磁传感器,其被配置为感测由环形磁体产生的磁场的第一参数,其中,磁传感器被配置为将磁场转换为表示触发器套的位置的输出电压。电动工具还包括控制器,其被配置为从磁传感器接收输出电压并基于接收到的输出电压控制电动工具的输出。
22.上述的电动工具,其中,电动工具的输出可以是转速。
23.上述的电动工具还可包括第二磁传感器,其被配置为感测环形磁体的第二参数并将输出传输到控制器,其中,第二磁传感器是数字磁传感器,并且第二参数是环形磁体的极性。
24.上述的电动工具,其中,控制器还被配置为基于控制器接收到第二磁传感器的输出来启动用于控制器的唤醒过程。
25.在详细解释任何实施方式之前,应当理解,实施方式的应用不限于在以下描述中阐述或在附图中所示的构造细节和部件布置。实施方式能够以各种方式实践或实施。另外,应当理解,本文所使用的措词和术语是出于描述的目的,而不应被认为是限制性的。“包括”、“包含”或“具有”及其变体的使用意在涵盖其后列出的项目及其等同项目以及附加项目。除非另有说明或限制,否则术语“安装”,“连接”,“支撑”和“联接”及其变型被广义地使用并且涵盖直接和间接的安装,连接,支撑和联接。
26.此外,应当理解,实施方式可以包括硬件、软件和电子部件或模块,为了讨论的目的,可能将这些部件或模块图示和描述为好像大多数部件仅在硬件中实现一样。然而,本领域普通技术人员基于对本详细描述的阅读,将认识到在至少一个实施方式中,基于电子的方面可以用可由一个或多个处理单元(例如微处理器和/或专用集成电路(“asic”))执行的软件实现(例如,存储在非暂时性计算机可读介质上)。因此,应当注意,可以利用多个基于硬件和软件的装置以及多个不同结构部件来实现实施方式。例如,说明书中描述的“服务
器”、“计算装置”、“控制器”、“处理器”等可包括一个或多个处理单元、一个或多个计算机可读介质模块、一个或多个输入/输出接口,以及连接不同部件的各种连接装置(例如,系统总线)。
27.与数量或条件结合使用的相对术语(例如“约”、“大约”、“大体上”等)将被普通技术人员理解为包括所述值并且具有上下文所规定的含义(例如,该术语至少包括与测量精度相关的误差程度、与特定值相关的公差(例如制造、组装、使用等)等)。此类术语也应被视为公开了由两个端点的绝对值定义的范围。例如,表述“约2至约4”也公开了“2至4”的范围。相对术语可以指所指示的值加或减一定百分比(例如,1%、5%、10%或更多)。
28.应当理解,虽然某些附图示出了位于特定装置内的硬件和软件,但是这些示图仅用于说明目的。此处描述为由一个部件执行的功能可由多个部件以分布式方式执行。同样,由多个部件执行的功能可以由单个部件合并和执行。在一些实施方式中,所示的部件可以组合或划分为单独的软件、固件和/或硬件。例如,逻辑和处理部件可以分布在多个电子处理器之间,而不是位于单个电子处理器内并由其执行。不管它们如何组合或划分,硬件和软件部件可以位于同一计算装置上或者可以分布在通过一个或多个网络或其他合适的通信链路连接的不同计算装置上。类似地,被描述为执行特定功能的部件也可以执行本文未描述的附加功能。例如,以某种方式“配置”的装置或结构至少以这种方式配置,但也可以未明确列出的方式配置。
29.通过考虑详细描述和附图,实施方式的其他方面将变得显而易见。
附图说明
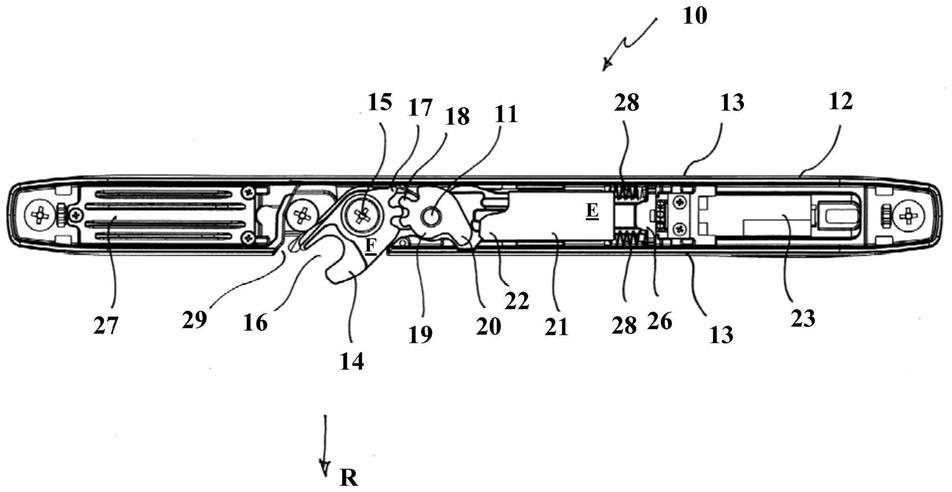
30.图1是根据一些实施方式的包括非接触式触发器的电动工具的透视图。
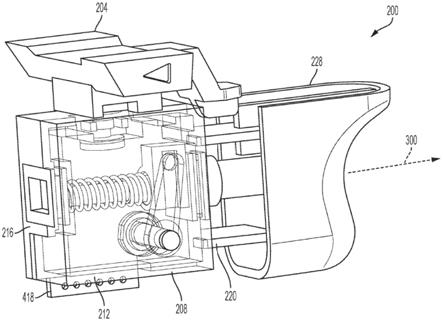
31.图2是根据一些实施方式的图1的电动工具的透视图,其中移除了壳体的一部分以示出非接触式触发器。
32.图3是根据一些实施方式的图2的非接触式触发器的透视图。
33.图4是根据一些实施方式的图3的非接触式触发器的分解透视图。
34.图5是根据一些实施方式的图3的非接触式触发器的透视剖视图,其中移除了壳体的一部分。
35.图6a是根据一些实施方式的处于非压下位置的图3的非接触式触发器的侧视图,其中移除了壳体的一部分。
36.图6b是根据一些实施方式的处于压下位置的图3的非接触式触发器的侧视图,其中移除了壳体的一部分。
37.图7是根据一些实施方式的图3的非接触式触发器的替代分解透视图。
38.图8是根据一些实施方式的图3的非接触式触发器的侧视剖视图。
39.图9是根据一些实施方式的图3的非接触式触发器的俯视剖视图。
40.图10a是根据一些实施方式的图3的非接触式触发器的透视剖视图,其中移除了壳体的一部分。
41.图10b是根据一些实施方式的图3的非接触式触发器的球形制动器的透视图。
42.图11是示出根据一些实施方式的在输入装置处于第一位置的情况下,磁体和多个磁传感器之间的界面的功能图。
43.图12是示出根据一些实施方式的在输入装置处于第二位置的情况下,图11的磁体和磁传感器之间的界面的功能图。
44.图13是示出根据一些实施方式的模拟磁传感器的输出与触发器行程量的关系的曲线图。
45.图14a是示出根据一些实施方式的数字磁传感器的输出与触发器行程量的关系的曲线图。
46.图14b是示出根据一些实施方式的双输出数字磁传感器的输出与选择器装置行程量的关系的曲线图。
47.图15是根据一些实施方式的无刷电动工具的框图。
48.图16是根据一些实施方式的图15中描述的电源开关网络的电路图。
49.图17是示出根据一些实施方式的用于控制电子电动工具的输出的过程的流程图。
50.图18是示出根据一些实施方式的电动工具的马达驱动曲线的曲线图。
51.图19a、图19b和图19c是根据一些实施方式的替代非接触式触发器组件的俯视图。
52.图20a、图20b和图20c是根据一些实施方式的图19a至图19c的非接触式触发器组件的替代配置的俯视图。
具体实施方式
53.图1示出了根据一个实施方式的示例性电动工具100。电动工具包括壳体105、电池组接口110、驱动器115(例如,卡盘或工具头保持器),以及非接触式触发器组件200。电动工具100还可具有模式选择装置。例如,模式选择装置可以是正向-反向选择器204,其可以允许用户控制工具的旋转部分的方向。虽然图1示出了具有旋转输出的特定电动工具,但是也考虑了本文描述的非接触式触发器设计可与多种类型的电动工具一起使用,例如电钻、驱动器、冲击驱动器、脉冲驱动器、电锯(例如带锯、圆锯、斜切锯等)、灯、锤钻、钉枪、u形钉钉枪、液体分配器(例如填缝枪)、压接和/或夹紧装置,或使用通过用户输入(例如触发器)控制的无刷直流(dc)马达的其他类型的电动工具。
54.图2示出了根据一些实施方式的电动工具100的剖视图。非接触式触发器组件200(也称为触发器200)和正向-反向选择器204(也称为选择器204)是对与工具100相关联的控制器的用户输入的类型,如下文所述。例如,触发器200可以产生指示期望速度或扭矩的模拟信号,该信号基于触发器套(trigger shoe)228的行进距离而变化。例如,模拟磁传感器可以与非接触式触发器组件200内的磁体通信。可以被认为是非接触式触发器组件的一部分的正向-反向选择器204能够从第一离散位置移动到第二离散位置。与上文类似,正向-反向选择器204可以包括与磁传感器(例如数字磁传感器)通信的磁体,从而基于正向-反向选择器204的位置向工具100的控制器输出信号。下面进一步描述这种控制器的一个示例(参见图15中的马达控制器930)。
55.图3和图4示出了根据一些实施方式的非接触式触发器组件200的详细视图。非接触式触发器组件200包括壳体208,壳体208具有彼此可移除地联接的第一壳体部分212和第二壳体部分216。第一壳体部分212包括从壳体208的第一表面224延伸的轨道220。壳体208的第一表面224在第一壳体部分212和第二壳体部分216联接时由第一壳体部分212和第二壳体部分216限定。轨道220被定位成允许触发器套228沿着轨道220的长度滑动,使得可以
实现触发器套228的行进距离。壳体208的第一表面224还包括从其延伸的可移动柱塞232。可移动柱塞232包括第一端236,其尺寸被设计成由触发器套228的圆形凹进部分240接收,使得触发器套228和可移动柱塞232联接,从而提供触发器套228和可移动柱塞232之间的同步运动。圆形凹进部分240的直径不是明显地大于可移动柱塞232的直径,从而允许可移动柱塞232和触发器套228之间的紧密配合。在替代实施方式中,可移动柱塞232和触发器套228可以通过诸如紧固件、粘合剂等的替代装置联接。在一些示例中,可以省略壳体208,并且上述部件可以直接安装在工具100的壳体105内。
56.与可移动柱塞232的第一端236相对的可移动柱塞232的第二端244设置在壳体208的内部部分238中。第一表面224包括孔248,其中开口构件252设置在孔248中。可移动柱塞232设置在开口构件252中,使得可移动柱塞232在开口构件252的环形表面254上滑动,其中可移动柱塞232的第一端236设置在壳体208的外部并且可移动柱塞232的第二端244设置在壳体208的内部。可移动柱塞232的第二端244包括凹进部分256(参见图5),其尺寸被设计成接收固定杆260,固定杆260联接到壳体208的内部表面264,其与壳体208的第一表面224相对。如图5所示,可移动柱塞232的凹进部分256包括一长度,其尺寸被设计成允许可移动柱塞232以行进距离移动,以使得触发器套228以行进距离移动。
57.参考图4和图5,弹簧268设置在固定杆260和可移动柱塞232的第二端244的外表面上,其中弹簧268设置在固定杆260的板272和可移动柱塞232的凸轮276之间。固定杆260的板272直接联接到壳体208的内表面264。可移动柱塞232的凸轮276包括大于弹簧268的直径的直径,使得弹簧268偏压凸轮276的第一表面280。由于凸轮276的直径大于开口构件252的直径,所以凸轮276防止可移动柱塞232的第二端244离开壳体208的内部部分238。弹簧268沿轴线a偏压可移动柱塞232的第一表面280,使得可移动柱塞232的第二表面与开口构件252连接(interface)。
58.如图5所示,壳体208的内部部分238还包括通过臂288联接到可移动柱塞232的凸轮276的环形磁体284。臂288通过臂288的第一销292可移动地联接到凸轮276。臂288还通过突起293永久地联接到环形磁体284。因此,当可移动柱塞232沿轴线a移动时,臂288沿方向c绕轴线b旋转,轴线b与环形磁体284的中心相交。当臂288沿方向c旋转时,环形磁体284也沿方向c旋转。环形磁体284的旋转改变了由印刷电路板(pcb)418(参见图6a和图6b)上的模拟磁传感器检测到的磁场。在一些实施方式中,模拟磁传感器是模拟旋转磁场传感器。模拟旋转磁场传感器可以被配置为向工具100的控制器(参见例如图15的马达控制器930)输出线性电压。线性电压可以指示触发器套228的位置,并且可以用于控制工具100的相关参数,例如马达的转速。在其他实施方式中,环形磁体284也可以与数字磁传感器通信。数字磁传感器可以被配置为基于检测到由环形磁体284响应于触发器套228被压下时而旋转而产生的磁场变化,从第一状态转变到第二状态。
59.在其他实施方式中,当旋转磁体产生指示磁体处于第一预定位置(例如,与完全释放的触发器套228相关联)的磁场时,数字磁传感器输出第一值。旋转磁传感器然后可以被配置为当磁体移动离开第一预定位置时提供第二值。数字磁传感器的过渡输出可以向工具100的控制器(参见例如图15的马达控制器930)提供输入,其指示控制器应该开启(例如,唤醒信号)。在更进一步的实施方式中,环形磁体284可以仅与数字磁传感器通信。例如,在工具100以单一速度操作或包括单独的速度调节机构(例如,速度拨盘)的一些实施方式中,仅
包括数字磁传感器来检测环形磁体284。
60.转到图6a,当触发器套228处于放松状态时,弹簧268将可移动柱塞232并因此触发器套228偏压到相对于壳体208的第一表面224的延伸位置。此时,环形磁体284处于第一位置,其具有相对于pcb 418的第一磁场,模拟旋转磁场传感器检测该第一磁场。由模拟旋转磁场传感器检测的第一磁场然后被转换为第一输出值,其然后由工具100的控制器接收。
61.转到图6b,当触发器套228被压下时,触发器套228沿轴线a移动可移动柱塞232,使得触发器套228朝向壳体208的第一表面224移动。可移动柱塞232的移动将弹簧268朝向固定杆260的板272偏压,从而也使凸轮276朝向板272移动。这又使臂288绕轴线b枢转,从而使环形磁体284沿方向c绕轴线b旋转。此时,环形磁体284处于第二位置,其具有相对于pcb 418的第二磁场,模拟旋转磁场传感器检测该第二磁场。由模拟旋转磁场传感器检测的第二磁场然后被转换为与第一输出电压不同的第二输出电压,其然后由工具100的控制器接收。
62.参考图6a,当压下触发器套228的力被移除时,弹簧268偏压凸轮276,这沿轴线a在远离壳体208的第一表面224的方向上移动可移动柱塞232并因此触发器套228。凸轮276的运动使臂288沿与方向c相反的方向绕轴线b枢转。因此,环形磁体284沿与方向c相反的方向旋转,直到凸轮276的运动被开口构件252抑制。此时,环形磁体284处于第一位置,其具有第一磁场,模拟旋转磁场传感器检测该第一磁场。由模拟旋转磁场传感器检测的第一磁场然后被转换为第一输出电压,其然后由工具100的控制器接收。
63.如图7至图8所示,如上所述,非接触式触发器200包括正向-反向选择器204。凸轮组件300通过选择器臂308(也参见图6)与选择器204的凹进部分壁304连通,选择器臂308的一部分延伸穿过壳体208的开口312(也参见图4)。开口312由第一壳体部分212和第二壳体部分216限定在垂直于壳体208的第一表面224的壳体208的第二表面314上。
64.参考图8,选择器臂308包括中心销部分316、中间部分320和向上延伸部分324。中心销部分316延伸穿过壳体208的开口312,使得中心销部分316定位在壳体208的内部部分238中并且在壳体208的外部。中心销部分316的位于壳体208的内部部分238中的端部联接到磁体328。中间部分320设置在壳体208的外部并一体地连接到中心销部分316。中间部分320沿着第二表面314延伸远离壳体208的开口312。向上延伸部分324一体地连接到中间部分320并且垂直于中间部分320,使得向上延伸部分324延伸远离第二表面314。向上延伸部分324包括第一侧332和与第一侧332相对的第二侧336,第一侧332和第二侧336是弯曲的(在图9中示出)。
65.球形制动器340设置在壳体208的内部部分238中的凹部中。球形制动器340由球形制动器弹簧344(参见图7)朝向中心销部分316的端部的外表面偏压。中心销部分316的外表面包括第一凹部348、第二凹部350和第三凹部352,每个凹部的尺寸均被设计为接收球形制动器340。
66.参考图9至图10b,选择器204可以沿轴线d在第一方向和第二方向上移动,第二方向与第一方向相反。当选择器204沿着轴线d在第一方向上移动时,选择器204的凹进部分壁304的第一壁356与向上延伸部分324的第一侧332接触。由于第一侧332是弯曲的,所以当第一壁356偏压第一侧332时,向上延伸部分324使中间部分320并因此中心销部分316沿方向f(参见图9)绕延伸穿过中心销部分316的中心的轴线e(参见图8、图10a)旋转。此时,球形制动器340移出充当中间位置的第二凹部350,并沿着中心销部分340的外表面移动。当第一壁
356继续偏压第一侧332时,中心销部分316继续旋转。中心销部分316并因此磁体328的继续旋转被接收在第一凹部348中的球形制动器340抑制,使得中心销部分316被锁定在第一位置(在图10b中示出)。
67.当选择器204沿着轴线d在第二方向上移动时,选择器204的凹进部分壁304的第二壁360与向上延伸部分324的第二侧336接触。由于第二侧336是弯曲的,所以当第二壁360偏压第二侧336时,向上延伸部分324使中间部分320并因此中心销部分316沿与方向f相反的方向绕轴线e旋转。当第二壁360继续偏压第二侧336时,中心销部分316继续旋转。中心销部分316并因此磁体328的继续旋转被接收在第二凹部350中的球形制动器340抑制,使得中心销部分316被锁定在中间位置(在图10b中示出)。由第二壁360施加的持续力将球形制动器340移出第二凹部350,沿着中心销部分340的表面并移动进入第三凹部352,其中中心销部分316被锁定在第二位置。
68.当凸轮组件300在第一位置和第二位置之间旋转时,磁体328的磁场相对于组件的静止元件(例如pcb 418)变化。磁场的这种变化由位于pcb 418上的磁场传感器420检测。在一个实施方式中,磁场传感器420是数字磁场传感器,其被配置为基于数字磁场传感器检测到磁体328的磁极的变化而从第一数字电平转换到第二数字电平。极性的变化由磁体328及其相关的磁极的旋转引起。
69.在一个示例中,pcb 418可以延伸出非接触式触发器组件200的壳体208。这种配置可以允许pcb 418延伸到工具100中,从而提供额外的pcb空间。例如,如图3和图8所示,pcb 418的一部分向下延伸出壳体208。
70.图11至图12是示出根据一些实施方式的与模拟磁传感器600和数字磁传感器602通信的环形磁体508的功能图。在一些实施方式中,模拟磁传感器600和数字磁传感器602都安装在pcb 418上,如上所述。在图11中,环形磁体508处于与处于完全释放位置的触发器套228相关联的位置。如图所示,模拟磁传感器600正在检测由环形磁体产生的磁场。如图11所示,磁场是基于模拟传感器600以与环形磁体508的中心线轴线604成角度θa定位而由模拟传感器接收的磁通量的结果。数字磁传感器602基于数字传感器602以与中心线轴线604成角度θb定位而检测磁场。数字磁传感器602可以是全向霍尔效应传感器,其具有通常为高的状态,其状态在磁体转变为不同的极性时降低,从而使数字传感器602对强的外部磁场不敏感。环形磁体508被示为具有两个磁极(例如,北极和南极)。如图11所示,两个磁极之间的边界平分了磁体的直径。对于正向/反向选择器204使用了类似的磁体设计。
71.图12示出了环形磁体处于与处于完全拉动位置的触发器套228相关联的位置。环形磁体现在被定位成使得磁体的南极被定位在模拟磁传感器600附近,以使得模拟磁传感器600基于模拟传感器以与中心线604成角度θa定位而接收磁场。因此,环形磁体现在被定位成使得磁体的北极定位在数字磁传感器602附近,并且基于数字传感器602以与中心线604成角度θb定位而接收磁场。模拟传感器600和数字传感器602都可以是旋转霍尔效应磁传感器,它们被配置为测量进入传感器表面的磁通密度矢量分量,并输出线性比例信号或数字信号。因此,磁传感器600、602不用于基于到磁性元件的距离来测量通量。相反,磁传感器600、602基于接收到的磁通密度矢量分量测量相应的传感器相对于磁体的角度,从而允许传感器600、602和磁体之间的距离在操作期间保持恒定。
72.图13是示出模拟磁传感器(例如磁传感器600)相对于触发器套228的行进距离的
一个示例性输出的曲线图。如图13所示,当触发器套228从初始放松位置(被压下0mm)移动到完全压下位置(被压下8mm)时,模拟传感器的输出以大体线性的方式增大,如输出趋势线700所示。特定的电压电平和行进距离仅仅是示例,因为在其他实施方式中使用了不同的电平和距离。此外,在一些实施方式中,触发器套228的行进距离与磁传感器600的模拟输出之间的关系是非线性的,例如是对数或指数的。在一些实施方式中,磁传感器600的输出是电压。然而,在其他实施方式中,输出是电流(例如4-20ma)或数字值。
73.图14a是示出数字磁传感器(例如由正向-反向选择器204使用的磁传感器602和/或数字磁传感器420)的一个示例性输出的曲线图。如图8所示,数字传感器的输出在数字高位(“1”)和数字低位(“0”)之间变化。也如图14a所示,在触发器拉动期间,当触发器套228行进约2mm时,数字磁传感器602转变为数字高位。然而,在一些实施方式中,数字磁传感器602可被配置为当触发器套228的行进距离小于2mm或大于2mm时转变为数字高位。进一步示出了数字传感器在触发器套228的释放期间转换回数字低位。例如,当触发器套228位于完全释放位置的0.9mm内时,数字传感器602可以转换回数字低位。然而,数字磁传感器602还可以被配置为当触发器套228小于完全释放位置的0.9mm,或大于完全释放位置的0.9mm时转变为数字低位。
74.类似地,正向-反向选择器204所使用的数字磁传感器420也可以输出数字高位和数字低位之间的转变。例如,当正向-反向选择器204处于第一锁定位置时,数字磁传感器420可以输出数字高位。在其他实施方式中,当正向-反向选择器204处于第二锁定位置时,数字磁传感器420可以输出数字高位。在一些实施方式中,取决于工具的配置,当正向-反向选择器204移出第一锁定位置或第二锁定位置时,数字磁传感器420可以转变为数字低位信号。在其他实施方式中,当正向-反向选择器204移动到第一锁定位置或第二锁定位置中的一个时,数字磁传感器420可以仅在数字状态之间转换。例如,当正向-反向选择器204置于第一锁定位置时,数字磁传感器420可转变为数字高位,而当正向-反向选择器置于第二锁定位置时,数字磁传感器420可转变为数字低位,或反之亦然。
75.图14b是示出双输出数字磁传感器(例如在一些实施方式中由正向-反向选择器204使用的数字磁传感器420)的一个示例性输出的曲线图。如图14b所示,数字磁传感器420可以被配置为当正向-反向选择器204处于第一位置时在第一输出处输出第一数字高位,当正向-反向选择器204处于第二位置时在第二输出处输出第二数字高位,以及当正向-反向选择器204处于第三位置时在第一输出和第二输出上的输出数字低位。例如,当正向-反向选择器204处于“正向”位置时,可以通过数字磁传感器420的第一输出输出第一数字高位750。相反,当正向-反向选择器204处于“反向”位置时,通过数字磁传感器420的第二输出输出第二数字高位752。最后,如果正向-反向选择器204处于“中间”或锁定位置,则在数字磁传感器420的第一输出和第二输出存在有数字低位。第一输出和第二输出可以通过控制器的两个或更多个输入/输出端口与控制器通信。如图14b所示,可以基于磁体328的期望旋转量来改变到数字高位的转变。例如,5度的旋转可能足以引起从数字磁传感器420的转变。然而,大于5度或小于5度也有被考虑。
76.图15示出了根据一些实施方式的无刷电动工具(例如电动工具100)的简化框图。电动工具100被示为包括电源922、电源开关网络924、马达926、霍尔效应传感器928、马达控制器930、用户输入932和其他部件936(例如,电池组电量计、工作灯(led)、电流/电压传感
器等)。电源922向电动工具100的各种部件提供dc电力并且可以是可再充电并使用例如锂离子电池单元技术的电动工具电池组。在一些情况下,电源922可以从联接到标准壁装插座的工具插头接收交流(ac)电(例如,120v/60hz市电),然后过滤、调节和整流接收到的电力以输出dc电。每个霍尔效应传感器928输出马达反馈信息,例如当转子的磁体在霍尔效应传感器928的表面上旋转时的指示(例如,脉冲)。基于来自霍尔效应传感器928的马达反馈信息,马达控制器930可以确定转子的位置、速度和加速度。
77.在一些实施方式中,马达控制器930包括存储指令的存储器和电子处理器,其与存储器联接以检索和执行指令从而实现本文所述的控制器930的功能。马达控制器930还被配置为从用户输入932接收控制信号,例如通过压下触发器套228或致动正向-反向选择器204。与用户输入932的操作相关联的输出可以经由上述模拟和数字磁传感器(例如模拟传感器600,以及数字传感器420和602)提供到马达控制器930。由用户输入932提供的控制信号的示例在图13和图14中示出,如上所述。在一些实施方式中,数字传感器420可以向控制器提供指示正向-反向选择器204的位置的控制信号(例如,数字信号),其继而指示控制器930以正向或反向方向操作马达926,这可经由电源开关网络924控制,如下所述。
78.响应于经由用户输入932接收的控制信号的马达反馈信息,马达控制器930将控制信号传输到电源开关网络924以驱动马达926,如关于图16更详细地解释的。在一些实施方式中,电动工具100可以是不包括霍尔效应传感器928或其他位置传感器以检测马达926的转子位置的无传感器电动工具。相反,可以基于马达926的电感或在马达926中产生的反电动势(emf)来检测转子位置。虽然没有明确地示出,但马达控制器930和电动工具100的其他部件电联接到电源922,使得电源922向其供电。
79.图16示出了电源开关网络924的电路图。电源开关网络924包括多个高侧电源切换元件940(例如,场效应晶体管(fet))和多个低侧电源切换元件944(例如,fet)。马达控制器930提供控制信号以控制高侧fet 940和低侧fet 944以基于上述马达反馈信息和用户控制来驱动马达。例如,响应于检测到触发器套228的拉动和来自正向-反向选择器204的输入,马达控制器930提供控制信号以选择性地启用和停用fet 940和944(例如,顺序地,成对地),从而导致来自电源922的电力被选择性地施加到马达926的定子线圈以引起转子的旋转。更具体地,为了驱动马达926,马达控制器920在第一时间段内启用第一高侧fet 940和第一低侧fet 944对(例如,通过在fet的栅极端子处提供电压)。响应于基于来自霍尔效应传感器928的脉冲确定马达926的转子已经旋转,马达控制器930停用第一fet对,并启用第二高侧fet 940和第二低侧fet 944。响应于基于来自霍尔效应传感器928的一个或多个脉冲确定马达926的转子已经旋转,马达控制器930停用第二fet对,并且启用第三高侧fet 940和第三低侧fet 944。该循环地启用高侧fet 940和低侧fet 944对的序列重复以驱动马达926。此外,在一些实施方式中,控制信号包括脉冲宽度调制(pwm)信号,其占空比为与触发器套228的触发器拉动量成比例地设置(如磁传感器600的输出所示),以由此控制马达926的速度或扭矩。
80.图17是根据一些实施方式的用于控制电子电动工具(诸如所述的电动工具100)的输出的过程1700。在过程框1702,电子电动工具的输入触发器被致动。例如,输入触发器可以是上述的触发器套228。然而,也可以使用其他输入触发器,例如按钮、杠杆等。在一些实施方式中,输入触发器在第一线性方向上被致动(例如,触发器套228的线性拉动)。在过程
框1704,输入触发器的线性致动经由一个或多个机械接口被转换为旋转运动。在一些实施方式中,使用上述非接触式触发器组件200将输入触发器的线性运动转换为旋转运动。然而,也考虑了用于将输入触发器的线性运动转换为旋转运动的其他配置。
81.在过程框1706,旋转运动被传递到电子电动工具的磁体,例如上述的环形磁体284。例如,磁体可以联接到旋转臂288,如上所述。因此,磁体基于输入触发器的致动而旋转。
82.在过程框1708,模拟传感器检测由旋转磁体产生的磁场的变化。在一个实施方式中,传感器是旋转霍尔效应磁传感器。模拟传感器可以被配置为检测磁通量密度分量的变化,该变化由磁体的旋转引起。在过程框1710,模拟传感器将感测到的磁场转换为输出信号,该输出信号可以提供给控制器,例如上述的马达控制器930。在一些实施方式中,模拟传感器的输出是随着磁体的旋转而线性变化的电压,如图13所示。然而,在其他示例中,输出可以是非线性输出,例如阶梯式输出、对数输出等。
83.在过程框1712,控制器930在接收到模拟传感器的输出时,基于接收到的模拟传感器输出来控制电动工具的输出。例如,马达控制器930接收来自模拟传感器600的输出并通过基于来自模拟传感器600的输出来控制电源开关网络924来驱动马达926,如上所述。在一个示例中,马达控制器930驱动电源开关网络924以在非线性操作中控制到马达926的输出功率,如图18中所示的马达驱动配置1800所示。
84.如图18所示,第一区域1802包括允许用户更精确控制的较低速度(例如,通过调节盖板228的下压量)。随后,第二区域1804允许工具在传感器的输出范围内更早(例如在触发器拉动中更早)达到全速。如图18所示,控制器930可以被配置为当触发器拉动达到全行程的60%时以100%功率操作工具的输出(例如,利用脉宽调制信号以100%占空比驱动电源开关网络924)。这种布置使工具的输出能够在触发器套228或其他输入触发器的容差范围内达到100%功率。如上所述,电动工具的输出可以是旋转输出,其中控制器基于接收到的传感器输出来控制旋转输出的旋转速度。在一些实施方式中,控制器还接收来自与正向-反向选择器204相关联的磁传感器420的控制信号。马达控制器930然后可以基于接收到的模拟传感器600的输出和来自磁传感器420的控制信号来控制电动工具的输出,以将工具的输出控制在期望的输出水平并且也在期望的方向上。
85.在一些实施方式中,在框1708中,除了模拟传感器之外或代替模拟传感器,数字磁传感器(例如数字磁传感器602)感测磁场的变化。在这些实施方式中,数字磁传感器将感测到的磁场转换为数字输出,例如在图14中在过程框1710所示的。另外,在过程框1712中,电动工具的控制器930可以接收数字输出以启动某些功能,例如指示控制器“唤醒”或初始化以便操作工具。例如,如果数字磁传感器向控制器输出数字高位,则控制器930可以“唤醒”或从“睡眠”或低功率模式进入正常模式。例如,控制器930可以在电子工具已经不活动达预定时间段(例如两小时)之后进入低功率模式。在一些实施方式中,如上所述,不包括模拟传感器600并且环形磁体284仅与数字磁传感器602通信。例如,在一些实施方式中,工具100以单一速度操作,包括单独的速度调节机构(例如,带有速度刻度盘的曲线锯),或者是包括在触发器拉动时启用的循环马达操作的工具(例如,钉枪(nailer)或u形钉钉枪(stapler)),仅包括数字传感器602以检测环形磁体284。因此,从数字传感器602到马达控制器930的控制信号充当到控制器930的启用信号,并且在过程步骤1712中,控制器930响应于从数字传
感器602接收到启用信号而驱动马达926。
86.图19a至图19c示出了一个替代实施方式的非接触式触发器组件1900(例如替代上述的非接触式触发器组件200)。类似于非接触式触发器组件200,非接触式触发器组件1900包括印刷电路板1902和臂1904。类似于非接触式触发器组件200,臂1904可以可移动地联接到可移动柱塞1908的凸轮1906。当可移动柱塞1908沿轴线a移动时,臂1904沿方向c旋转。非接触式触发器组件1900还包括在枢转凸轮1912处联接到臂1904的金属构件1910,并且被配置为与臂1904一起旋转。在一个实施方式中,金属构件1910由含铁材料(ferrous material)构成。在其他实施方式中,金属构件1910可由有色金属材料(non-ferrous material)构成。示例性金属材料可以包括铁、钢、铝、铜等。感应线圈1914联接到电路板1902,并且位于电路板1902和臂1904之间。在一些实施方式中,向感应线圈提供电流以产生磁场。
87.当臂1904沿方向c旋转时,金属构件1910也沿方向c旋转。如图19所示,金属构件1910和感应线圈1914不是连续的环形形状,而是根据可移动柱塞的位置在一定程度上重叠的弯曲弧形。金属构件1910的旋转导致含铁构件1910的量发生变化,从而改变由感应线圈1914产生的磁场强度,这进而由印刷电路板1902上的传感器检测。感测到的磁场的变化可以与触发器的位置相关联。感应变化的磁场的强度消除了对旋转磁场传感器的需要。在一个实施方式中,传感器是模拟旋转磁场传感器。在其他实施方式中,传感器是被配置为感测由电感线圈1914产生的磁场强度的电感传感器。
88.如上所述,臂1904与含铁构件1910一起沿方向c旋转。当臂1904旋转时,感应线圈1914的被金属构件1910覆盖的部分改变。如图19a所示,触发器(未示出)处于放松位置,从而使得臂处于第一位置。在第一位置,金属构件1910被定位成使得它覆盖感应线圈1914的整个长度。如图19b所示,当臂1904由于触发器的移动而移动到第二位置时,金属构件1910的覆盖感应线圈1914的部分减少了与臂1904的移动成比例的值。如图19c所示,当臂1904到达最大行进位置时,金属构件1910的覆盖感应线圈1914的部分被进一步减少。通过减少由感应构件1910覆盖的感应线圈1914的量,磁场发生变化,该磁场由传感器检测。传感器被配置为向控制器(例如马达控制器930)提供表示感测到的电感值的输出,其然后可以用于控制电动工具的输出,例如如上所述。
89.图20a至图20c示出了非接触式触发器组件2000,其作为非接触式触发器组件1900的一个替代实施方式。触发器组件200的部件和操作类似于触发器组件1900的部件和操作,并且应当理解,除非下文另有说明,否则非接触式触发器组件2000的部件和操作与非接触式触发器组件1900中的那些相同。如图20a所示,感应线圈1914被定位成使得当触发器处于放松位置(例如未压下)时,金属构件1910的任何部分都没有覆盖感应线圈1914。在图20a中,触发器(未示出)处于放松(例如未压下)位置,从而导致臂处于第一位置。在第一位置,金属构件1910被定位成使得它不覆盖感应线圈1914的任何部分(或最小部分)。如图20b所示,当臂1904由于触发器的移动而移动到第二位置时,金属构件1910的覆盖感应线圈的部分增加了与臂1904的移动成比例的值。如图20c所示,当臂1904到达最大行进位置时,金属构件1910的覆盖感应线圈1914的部分进一步增加。通过增加被金属构件1910覆盖的感应线圈1914的量,磁场值发生变化,该值由印刷电路板1902上的传感器检测。该传感器被配置为向控制器(例如马达控制器930)提供表示感测到的磁场值的输出,其然后可以用于控制电
动工具的输出,例如如上所述。
90.在一些实施方式中,触发器组件1900和/或触发器组件2000的感应线圈1914可以被配置为包括正弦形状但偏移90
°
的多个接收迹线或导体,使得当金属构件1910旋转时,迹线/导体中的一个中感应的电压是正弦波,而迹线/导体中的另一个中感应的电压是余弦波。两个迹线/导体的电压输出由传感器(例如tx正弦余弦传感器)感测,然后可以提供给控制器,例如马达控制器930。马达控制器930然后可以确定金属构件1910相对于感应线圈1914的迹线/导体的位置(例如旋转角度)。在一些实施方式中,该角度由马达控制器930使用反正切函数产生,在一些实施方式中,正弦-余弦传感器可以达到大约0.15
°
的分辨率来检测金属构件1910的位置,并且达到大于98%的检测精度。
91.因此,本文所述的实施方式尤其提供了一种用于电动工具的非接触式触发器组件。在所附权利要求中阐述了各种特征和优点。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。