1.本主题公开涉及一种用于车辆的主动侧倾控制系统,并且特别地,涉及一种在来自电源的动力损失期间操作主动侧倾控制系统的方法。
背景技术:
2.主动侧倾控制系统是设计成例如依次减小车辆侧倾的系统,并且通常通过将系统连接至诸如汽车电池的高功率电源而被供电。然而,如果高功率电源发生故障或以其他方式与主动侧倾控制系统断开连接,则允许该系统自由转动(freewheel),这会导致不期望的车辆运动和/或失去车辆稳定性控制。因此,期望在来自高功率电源的动力损失期间提供对主动侧倾控制系统的控制。
技术实现要素:
3.在一个示例性实施例中,公开了一种控制车辆侧倾的方法。侧倾控制致动器经由第一开关与第一电源电分离。第二开关操作成将侧倾控制致动器短路接地以控制车辆的侧倾。
4.除了本文描述的一个或多个特征之外,第二开关操作成在接地配置(ground configuration)和自由飞轮配置(freewheel configuration)之间控制侧倾控制致动器的电连接。第二开关使用经脉宽调制的控制信号进行操作。基于车辆的侧倾角和车辆的侧倾速度之一来控制控制信号的占空比。当侧倾角返回到中心位置时,可以增加控制信号的占空比。操作第二开关还包括操作机械开关和场效应晶体管之一。在侧倾控制致动器包括前轮主动侧倾控制(arc)致动器和后轮arc致动器的实施例中,通过使用第一控制信号来控制前轮arc致动器以在车辆的前轮处提供第一侧倾阻力,通过使用第二控制信号来控制后轮arc致动器以在车辆的后轮处提供第二侧倾阻力,从而为车辆的后轮侧倾阻力分布提供选定的前侧倾阻力。
5.在另一示例性实施例中,公开了一种用于控制车辆侧倾的系统。该系统包括侧倾控制致动器、配置为将侧倾控制致动器联接至第一电源的第一开关、配置为控制侧倾控制致动器与地面之间的电连接的第二开关以及处理器。处理器配置为操作第一开关以将侧倾控制致动器与第一电源电分离,将第二开关操作至接地以使侧倾控制致动器短路接地以控制车辆的侧倾。
6.除了本文描述的一个或多个特征之外,处理器还配置为操作第二开关以在接地配置和自由飞轮配置之间控制侧倾控制致动器的电连接。处理器还配置为使用经脉宽调制的控制信号来操作第二开关。处理器还配置为基于车辆的侧倾角和车辆的侧倾速度之一来控制控制信号的占空比。处理器还配置为随着侧倾角返回到中心位置来增加控制信号的占空比。第二开关可以是机械开关和场效应晶体管之一。在实施例中,侧倾控制致动器包括前轮主动侧倾控制(arc)致动器和后轮arc致动器,并且处理器配置为使用第一控制信号来控制前轮arc致动器以在车辆的前轮处提供第一侧倾阻力,并使用第二控制信号控制后轮arc致
动器,以在车辆的后轮处提供第二侧倾阻力,从而为车辆的后轮侧倾阻力分布提供选定的前侧倾阻力。
7.在又一示例性实施例中,公开了一种车辆。该车辆包括侧倾控制致动器、配置为将侧倾控制致动器联接至第一电源的第一开关、配置为控制侧倾控制致动器与第二电源之间的电连接的第二开关以及处理器。处理器配置为操作第一开关以将侧倾控制致动器与第一电源电分离,并且操作第二开关以将侧倾控制致动器短路接地以控制车辆的侧倾。
8.除了本文描述的一个或多个特征之外,处理器还配置为操作第二开关以在接地配置和自由飞轮配置之间控制侧倾控制致动器的电连接。处理器还配置为使用经脉宽调制的控制信号来操作第二开关。处理器还配置为基于车辆的侧倾角和车辆的侧倾速度之一来控制控制信号的占空比。处理器还配置为随着侧倾角返回到中心位置来增加控制信号的占空比。在实施例中,侧倾控制致动器还包括前轮主动侧倾控制(arc)致动器和后轮arc致动器,并且处理器还配置为使用第一控制信号来控制前轮arc致动器以在车辆的前轮处提供第一侧倾阻力,并使用第二控制信号控制后轮arc致动器,以在车辆的后轮处提供第二侧倾阻力,从而为车辆的后轮侧倾阻力分布提供选定的前侧倾阻力。
9.当结合附图考虑时,根据以下详细描述,本公开的上述特征和优点以及其他特征和优点将显而易见。
附图说明
10.其他特征、优点和细节仅通过示例的方式在下面的详细描述中出现,该详细描述参考附图,其中:
11.图1示出在示例性实施例中,具有主动侧倾控制系统的车辆;
12.图2示出在示例性实施例中,主动侧倾控制系统的电路图;
13.图3示出了使用在故障模式下运行的图2的主动侧倾控制系统获得的侧倾控制图;
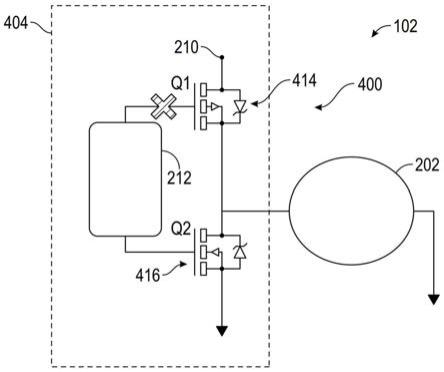
14.图4示出了在替代实施例中,主动侧倾控制系统的电路图;
15.图5示出了在故障操作模式期间,使用图4的主动侧倾控制系统获得的侧倾控制图;
16.图6示出基于使用图4所示的主动侧倾控制系统的侧倾控制图,以基于侧倾角速度控制侧倾角;
17.图7示出了适用于使用前轮和后轮两者来控制侧倾角的主动侧倾控制系统;以及
18.图8示出了用于操作主动侧倾控制系统的方法的流程图。
具体实施方式
19.以下描述本质上仅是示例性的,并且无意于限制本公开、其应用或用途。
20.根据示例性实施例,图1示出了具有主动侧倾控制系统(arc系统102)的车辆100。arc系统102在车辆100从中心向一侧或另一侧侧倾时(例如当车辆100转弯时)控制车辆100的侧倾。驾驶员侧传感器104a与车辆100的驾驶员侧或驾驶员侧轮胎106a相关联。乘客侧传感器104b与车辆100的乘客侧或乘客侧轮胎106b相关联。驾驶员侧传感器104a和乘客侧传感器104b提供可用于确定车辆100的侧倾角的信号。在一个实施例中,驾驶员侧传感器104a和乘客侧传感器104b是分别测量与相应车辆拐角的车轮的中心位置有关的电参数(例如电
流或电阻)的电传感器。arc系统102根据电参数测量值确定侧倾角并相应地控制车辆的侧倾。特别地,arc系统102基于电参数之间的差异来确定侧倾角。
21.图2示出了在示例性实施例中,arc系统102的电路图200。arc系统102包括用于控制车辆100的侧倾角的侧倾控制致动器(在本文中也称为主动侧倾控制致动器或arc致动器202)和用于向arc致动器202供电的电源电路204。arc致动器202包括连接到电源电路204的高功率电源引线(hp引线206)和连接到地面的接地引线208。
22.电源电路204包括第一电源(即,高功率电源210)和第二电源(例如,低功率控制器212)。高功率电源210是提供约48v的电源,比如汽车电池。低功率控制器212提供大约12v的电压,并且可以包括用于向车辆的无线电、gps、声音系统等供电的辅助电池或电源。电源电路204还包括第一开关(即,高功率开关214)和第二开关(即,接地开关216),两者均可以是由电继电器或机械继电器操作的机械开关。在一个实施例中,高功率开关214和接地开关216均为单刀双掷(spdt)开关。arc致动器202的hp引线206在高功率开关214和接地开关216之间电连接到功率电路204。
23.低功率控制器212包括处理器,该处理器用于控制高功率开关214和接地开关216的配置,以便控制arc致动器202的操作。hp引线206可以通过闭合高功率开关214并断开接地开关216而连接到高功率电源210。该配置为arc系统102提供正常操作模式。当在高功率电源210处发生电源中断时,可以将高功率开关214放置在如图2所示的断开状态,从而将arc致动器202与高功率电源210电分离,并且将arc系统102置于故障操作模式。
24.在高功率开关214处于断开配置的情况下,当通过来自车轮的输入来驱动时,arc致动器202重新产生动力。在接地开关216处于接地配置的情况下,如图2所示,arc致动器202的hp导线206电接地,大大增加了旋转arc电机所需的扭矩。在接地开关216处于电源配置的情况下,hp引线206通过低功率控制器212电连接到地面。
25.图3示出了使用在故障模式中运行的图2的arc系统102获得的侧倾控制图300。侧倾控制图300示出了沿横坐标的侧倾角和沿纵坐标轴的接地连续性。侧倾角以度为单位进行测量,零度表示车辆处于中立或中心位置(即,车辆的中间平面垂直延伸)。接地连续性表示通过接地开关216的操作,arc致动器202接地的时间百分比。100%的接地连续性表示arc致动器202短路接地,而0%的接地连续性表示未接地。侧倾控制图300表示接地开关216在车辆的多个侧倾角下的操作。显示了车辆的左侧和右侧的侧倾。
26.当车辆沿着转弯曲线(roll-out curve)302偏离中心时,接地开关216配置为将arc致动器202短路接地。这种配置在底盘中提供了抵抗从中心侧倾的阻力。当侧倾角达到最大或基本最大时,接地开关216配置为将arc致动器202与地面断开连接,以使其自由转动。因此,arc致动器202允许车辆以很小的阻力或没有阻力地回滚至中心,如滚入曲线(roll-in curve)304所示。在选定的侧倾角(例如,与竖直方向成约0.5度)下,可以重新配置接地开关216以将arc致动器202短路接地,如滚入曲线306所示。
27.图4示出了替代实施例中的arc系统102的电路图400。arc系统102包括arc致动器202和用于向arc致动器202供电的电源电路404。电源电路404包括高功率电源210和低功率控制器212。电源电路还包括高功率开关414和接地开关416,接地开关是fet(场效应晶体管),例如mosfet(金属氧化物半导体场效应晶体管)。低功率控制器212电子控制高功率开关414以将arc致动器202与高功率电源210连接或断开连接。低功率控制器212电子控制接
地开关416以控制arc致动器202与低功率电源或地面之间的电连接。低功率控制器212将诸如脉宽调制(pwm)信号的控制信号施加至接地开关416。pwm信号包括通常为矩形波形式的波形,该矩形波具有处于最大电压的导通状态和处于零伏的截止状态。pwm信号的占空比是表示pwm信号的周期的一部分的比率,在该部分期间信号处于导通状态与截止状态。80%占空比表示波形在80%的波形周期内处于导通状态,而在20%的波形周期内处于截止状态,20%占空比表示该波形在20%的波形周期内处于导通状态,在80%的波形周期内处于截止状态。低功率控制器212可以调节控制信号的占空比。
28.图5示出了在故障操作模式期间使用图2的arc系统102获得的侧倾控制图500。横坐标表示侧倾角,以度为单位,纵坐标表示接地连续性,以百分比表示。当车辆沿着转弯曲线502从中心侧倾时,接地开关416配置为使arc致动器202短路接地,从而在从中心侧倾期间给侧倾提供阻力。当侧倾角达到最大或基本最大时,接地开关416配置成经由低功率控制器212将arc致动器202与低功率接地断开,从而使其自由转动。当车辆回滚至中心时,低功率控制器212以相对较低的占空比(例如,0%占空比)施加控制信号,并且随着侧倾角返回至中心而增大占空比。因此,随着车辆回滚至中心,抵抗侧倾施加的阻力量增加,最终返回其原始阻力水平(例如,100%的占空比)。转弯曲线504示出了随着侧倾角回到中心,占空比的逐渐变化。
29.图6示出了基于使用图4所示的arc系统102的侧倾控制图600,以根据侧倾角速度控制侧倾角。横坐标表示侧倾角速度,纵坐标轴表示接地连续性。曲线602示出了车辆的顺时针旋转,而曲线604示出了车辆的逆时针旋转。曲线602示出了仅在侧倾角回到中心时施加的侧倾阻力。
30.图7示出了适合于使用前轮和后轮两者来控制侧倾角的arc系统700。arc系统700可以用于执行轮胎横向载荷传递分布(tlltd),以便独立地控制前轮和后轮中的每个的侧倾阻力。arc系统700包括前轮arc致动器702和后轮arc致动器712,两者均可以根据本文关于图4公开的方法来操作。前轮arc致动器702可以经由前高功率开关704联接至高功率电源710,并且可以经由前接地开关706接地。类似地,后轮arc致动器712可以经由后高功率开关714联接至高功率电源710,并经由后接地开关716接地。前高功率开关704和前接地开关706可以独立于后高功率开关714和后接地开关716进行操作。开关是场效应管。
31.低功率控制器708控制这些开关中的每一个的配置。在故障操作模式中,低功率控制器708打开前高功率开关704和后高功率开关714两者,以将它们各自的arc致动器与高功率电源710断开连接。然后,低功率控制器708发送第一控制信号720给前接地开关706,改送第二控制信号722给后接地开关716。第一控制信号720具有第一占空比,第二控制信号722具有第二占空比(如图7所示,波形在0伏和5伏之间交替变化)。
32.可以选择第一占空比和第二占空比以控制前轮和后轮之间的相对侧倾阻力。在各个实施例中,第一占空比大于第二占空比,因此操作前轮arc致动器702以在前轮处提供第一侧倾阻力,并且操作后轮arc致动器712以在后轮处提供第二侧倾阻力。第一侧倾电阻大于第二侧倾电阻。如图7所示,仅出于说明目的,第一占空比为80%,而第二占空比为20%。当车辆的侧倾角回到中心时,可以调节第一占空比和第二占空比之间的比率,以使前轮和后轮在车辆中心具有最佳的侧倾阻力分布。最佳的侧倾阻力分布可以包括前轮侧倾阻力和后轮侧倾阻力之间的选定比率,该比率可以是基于车辆类型的车辆指定比率。
33.图8示出了流程图800,其示出了用于操作主动侧倾控制系统的方法。该方法开始于框802,其中arc致动器在正常操作模式下在正常侧倾刚度(normal roll stiffness)下操作。
34.在框804中,该方法确定高功率电源是否已关闭或有故障。如果高功率电源仍在正确地工作(即,高功率电源仍在接通),则该方法进行到框806,在其中arc致动器保持与高功率电源的连接。该方法从框806前进到框802以监控高功率电源。返回框804,如果高功率电源未正确操作,则该方法前进至框808。在框808中,arc致动器与高功率电源断开连接。
35.在框810中,该方法确定车辆侧倾角是否在中心(即,与竖直方向成零度)。如果侧倾角处于中心,则该方法前进至框812。在框812中,将arc致动器的hp引线接地,并且将该方法返回至框804。返回框810,如果侧倾角不位于中心,则该方法进行到框814。
36.在框814中,确定侧倾角是否正在减小(即,返回中心)。如果侧倾角没有减小(即,稳定或增大),则该方法前进至框816。在框816中,hp引线接地或保持接地。然后该方法返回到框814。返回到框814,如果侧倾角减小,则该方法进行到框818。在框818中,hp电源线从地面断开,允许arc自由转动。
37.在框820中,如所选择的标准所定义的那样,确定侧倾角是否接近零度。如果侧倾角在所选标准内未接近零度,则方法返回至框818。但是,如果在框820,侧倾角在所选标准内,则方法进行至框822。在框822中,pwm控制信号用于通过控制hp引线与地面的电气连接来控制归零。
38.在框824中,确定侧倾角是零还是基本为零,以处于所选择的误差内。如果侧倾角不为零,则该方法返回到框822,并且仍然施加控制信号。返回方框824,如果侧倾角为零,则方法进行至方框812。在方框812中,hp引线接地,并且方法返回至方框804。
39.尽管已经参考示例性实施例描述了以上公开,但是本领域技术人员将理解,在不脱离本发明范围的情况下,可以进行各种改变并且可以用等同物代替其要素。另外,在不脱离本公开的实质范围的情况下,可以做出许多修改以使特定情况或材料适应本公开的教导。因此,意图是本公开不限于所公开的特定实施例,而是将包括落入其范围内的所有实施例。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
