1.本发明属于汽车技术领域,特别涉及一种车辆方向盘摆振优化方法。
背景技术:
2.现有的车辆通过方向盘来调节车辆的运行方向,车辆在高速行驶过程中,方向盘容易产生剧烈摆振,这将严重影响车辆的使用寿命和用户乘坐的舒适性。然而在车辆设计阶段,由于引起方向盘摆振的因素是多种多样的,很难准确地找到车辆在高速行驶时影响方向盘发生摆振的原因,不利于设计师对方向盘摆振进行优化。
技术实现要素:
3.本发明的目的在于解决现有技术中在车辆设计阶段,由于车辆在高速行驶过程中引起方向盘摆振的因素是多种多样的,很难准确地找到影响方向盘发生摆振的原因,不利于设计师对方向盘摆振进行优化的问题。本发明提供了一种车辆方向盘摆振优化方法,能够准确地找到影响方向盘发生摆振的原因,提高方向盘摆振优化的工作效率。
4.为解决上述技术问题,本发明实施方式公开了一种车辆方向盘摆振优化方法,车辆方向盘摆振优化方法包括以下步骤:
5.s1:采集影响方向盘摆振的部件的关联参数,其中,部件包括车轮、制动盘、传动轴、摆臂衬套、螺旋簧、以及转向机扭簧中的至少一种;
6.s2:检测关联参数,并判断关联参数是否满足目标要求;
7.若否,则优化关联参数;
8.s3:将优化关联参数后的车辆以速度v行驶,获取方向盘的当前x向加速度,根据当前x向加速度与加速度阈值的比较结果判断方向盘是否发生摆振;其中,速度v大于预设速度阈值,x向与车辆的长度方向平行;
9.若当前x向加速度大于加速度阈值,则判断为方向盘发生摆振,继续步骤s2;
10.若当前x向加速度小于或等于加速度阈值,则判断为方向盘未发生摆振,结束优化步骤。
11.采用上述技术方案,在车辆设计阶段,若方向盘的当前x向加速度大于加速度阈值,则方向盘产生摆振,通过检测并优化车轮、制动盘、传动轴、摆臂衬套、螺旋簧、以及转向机扭簧中的至少一种影响方向盘的部件的关联参数,使方向盘摆振达到目标要求即使方向盘的当前x向加速度小于或等于加速度阈值,这样能够准确地找到影响方向盘发生摆振的原因,提高方向盘摆振优化的工作效率,从而提高车辆的使用寿命和用户乘坐的舒适性。此方案可以运用到各个车辆车型方向盘产生摆振时的优化中。
12.根据本发明的另一具体实施方式,本发明的实施方式公开的车辆方向盘摆振优化方法,部件包括车轮、制动盘、传动轴、摆臂衬套、螺旋簧、以及转向机扭簧;步骤s2包括:
13.s21:检测车轮的关联参数,判断车轮的关联参数是否满足车轮目标要求;其中,车轮的关联参数包括轮胎侧向力、轮胎径向力、轮辋内侧动不平衡量、轮辋外侧动不平衡量、
车轮动不平衡量、以及轮辋与轮毂轴承配合间隙;
14.若是,则进入步骤s22;
15.若否,则优化车轮的关联参数,以使车轮的关联参数满足车轮目标要求,并继续执行步骤s3,其中若判断当前x向加速度大于加速度阈值,则进入步骤s22;
16.s22:检测制动盘的关联参数,判断制动盘的关联参数是否满足制动盘目标要求;其中制动盘的关联参数包括制动盘静不平衡量,制动盘目标要求包括制动盘静不平衡量小于或等于制动盘静不平衡量阈值;
17.若是,则进入步骤s23;
18.若否,则优化制动盘静不平衡量,以使制动盘静不平衡量小于或等于制动盘静不平衡量阈值,并继续执行步骤s3,其中若判断当前x向加速度大于加速度阈值,则进入步骤s23;
19.s23:检测传动轴的关联参数,判断传动轴的关联参数是否满足传动轴目标要求;其中,传动轴的关联参数包括传动轴节型和传动轴夹角;
20.若是,则进入步骤s24;
21.若否,则优化传动轴的关联参数,以使传动轴的关联参数满足传动轴目标要求,并继续执行步骤s3,其中若判断当前x向加速度大于加速度阈值,则进入步骤s24;
22.s24:检测摆臂衬套的关联参数,判断摆臂衬套的关联参数是否满足摆臂衬套目标要求;其中,摆臂衬套的关联参数包括摆臂衬套刚度,摆臂衬套目标要求包括摆臂衬套刚度偏差在偏差阈值范围内;
23.若是,则进入步骤s25;
24.若否,则优化摆臂衬套刚度,以使摆臂衬套刚度偏差在偏差阈值范围内,并继续执行步骤s3,其中若判断当前x向加速度大于加速度阈值,则进入步骤s25;
25.s25:检测螺旋簧的关联参数,判断螺旋簧的关联参数是否满足螺旋簧目标要求;其中,螺旋簧的关联参数包括螺旋簧刚度,螺旋簧目标要求包括螺旋簧刚度在螺旋簧刚度阈值范围;
26.若是,则进入步骤s26;
27.若否,则优化螺旋簧刚度,以使螺旋簧刚度在螺旋簧刚度阈值范围,并继续执行步骤s3,其中若判断当前x向加速度大于加速度阈值,则进入步骤s26;
28.s26:检测转向机扭簧的关联参数,判断转向机扭簧的关联参数是否满足转向机扭簧目标要求;其中,转向机扭簧的关联参数包括转向机扭簧刚度,转向机扭簧目标要求包括转向机扭簧刚度在转向机扭簧刚度阈值范围内;若否,则优化转向机扭簧刚度,以使转向机扭簧刚度在转向机扭簧刚度阈值范围内,并继续执行步骤s3,直至当前x向加速度小于或等于加速度阈值。
29.采用上述技术方案,方向盘发生摆振后,通过依次检测和判断车轮、制动盘、传动轴、摆臂衬套、螺旋簧、以及转向机扭簧等影响方向盘的部件的关联参数是否满足各部件的目标要求,如果不满足目标要求或方向盘的振动不满足要求,对应的依次优化各部件的关联参数,以使方向盘振动达到目标要求即当前x向加速度小于或等于加速度阈值,能够使得车辆方向盘发生摆振后的优化方向更加具体,节省优化时间,提高了优化的效率。
30.根据本发明的另一具体实施方式,本发明的实施方式公开的车辆方向盘摆振优化
方法,车轮目标要求包括轮胎侧向力小于或等于轮胎侧向力阈值,轮胎径向力小于或等于轮胎径向力阈值,轮辋内侧动不平衡量小于或等于轮辋内侧动不平衡量阈值,轮辋外侧动不平衡量小于或等于轮辋外侧动不平衡量阈值,车轮动不平衡量小于或等于车轮动不平衡量阈值,其中车轮包括轮胎、轮毂、以及气门嘴,轮辋与轮毂轴承配合间隙小于或等于间隙阈值。
31.根据本发明的另一具体实施方式,本发明的实施方式公开的车辆方向盘摆振优化方法,传动轴目标要求包括传动轴节型为目标传动轴节型、传动轴夹角小于传动轴夹角阈值。
32.根据本发明的另一具体实施方式,本发明的实施方式公开的车辆方向盘摆振优化方法,预设速度阈值为100km/h。
33.根据本发明的另一具体实施方式,本发明的实施方式公开的车辆方向盘摆振优化方法,加速度阈值为1m/s2。
34.根据本发明的另一具体实施方式,本发明的实施方式公开的车辆方向盘摆振优化方法,制动盘静不平衡量阈值为50g
·
mm,偏差阈值范围为-15%~15%,螺旋簧刚度阈值范围为20n/mm~30n/mm,转向机扭簧刚度阈值范围为48.4n/mm~55.6n/mm,轮胎侧向力阈值为6kgf,轮胎径向力阈值为9kgf,轮辋内侧动不平衡量阈值为20g
·
mm,轮辋外侧动不平衡量阈值为30g
·
mm,车轮动不平衡量阈值为5g
·
cm,间隙阈值为54.1um,目标传动轴节型为三段式aar节型,传动轴夹角阈值小于或等于3
°
。
35.根据本发明的另一具体实施方式,本发明的实施方式公开的车辆方向盘摆振优化方法,优化制动盘静不平衡量包括调整制动盘的不平衡量、以及更换制动盘中的至少一种;优化摆臂衬套刚度为更换摆臂衬套;优化螺旋簧刚度为更换螺旋簧;优化转向机扭簧刚度为更换转向机扭簧。
36.根据本发明的另一具体实施方式,本发明的实施方式公开的车辆方向盘摆振优化方法,优化车轮的关联参数包括优化轮胎侧向力、优化轮胎径向力、优化轮辋内侧动不平衡量、优化轮辋外侧动不平衡量、优化车轮动不平衡量、以及优化轮辋与轮毂轴承配合间隙;其中优化轮胎侧向力为更换轮胎;优化轮胎径向力为更换轮胎;优化轮辋内侧动不平衡量包括调整轮辋内侧动不平衡量、以及更换轮辋中的至少一种;优化轮辋外侧动不平衡量包括调整轮辋外侧动不平衡量、以及更换轮辋中的至少一种;优化车轮动不平衡量包括调整车轮动不平衡量、以及更换车轮中的至少一种,其中更换车轮包括更换轮胎、更换轮毂、以及更换气门嘴中的至少一种;优化轮辋与轮毂轴承配合间隙为更换轮毂。
37.根据本发明的另一具体实施方式,本发明的实施方式公开的车辆方向盘摆振优化方法,优化传动轴的相关参数包括优化传动轴节型、以及优化传动轴夹角;其中优化传动轴节型为更换传动轴;优化传动轴夹角包括调整传动轴夹角、以及更换传动轴中的至少一种。
38.本发明的有益效果是:
39.本发明提供的车辆方向盘摆振优化方法,在车辆设计阶段,方向盘产生摆振,通过检测并优化车轮、制动盘、传动轴、摆臂衬套、螺旋簧、以及转向机扭簧中的至少一种影响方向盘的部件的关联参数,使方向盘摆振达到目标要求即使方向盘的当前x向加速度小于或等于加速度阈值,这样能够准确地找到车辆在高速行驶过程中影响方向盘发生摆振的原因,使得优化方向更加具体,从而提高方向盘摆振优化的工作效率,进一步提高车辆的使用
寿命和用户乘坐的舒适性。另外,此方案可以运用到各个车辆车型方向盘产生摆振时的优化中。
附图说明
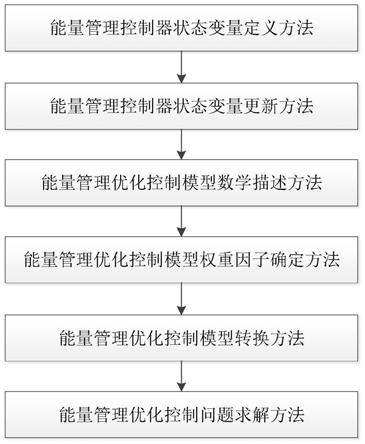
40.图1为本发明提供的车辆方向盘摆振优化方法的流程示意图;
41.图2为一种车辆的方向盘以及本发明提供的影响方向盘的部件的结构示意图。
42.附图标记说明:
43.100:方向盘;200:车轮;210:轮胎;220:轮毂;221:轮辋;300:制动盘;400:传动轴;500:摆臂衬套;600:螺旋簧;700:转向机扭簧。
具体实施方式
44.以下由特定的具体实施例说明本发明的实施方式,本领域技术人员可由本说明书所揭示的内容轻易地了解本发明的其他优点及功效。虽然本发明的描述将结合较佳实施例一起介绍,但这并不代表此发明的特征仅限于该实施方式。恰恰相反,结合实施方式作发明介绍的目的是为了覆盖基于本发明的权利要求而有可能延伸出的其它选择或改造。为了提供对本发明的深度了解,以下描述中将包含许多具体的细节。本发明也可以不使用这些细节实施。此外,为了避免混乱或模糊本发明的重点,有些具体细节将在描述中被省略。需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
45.应注意的是,在本说明书中,相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
46.在本实施例的描述中,需要说明的是,术语“上”、“下”、“内”、“底”等指示的方位或位置关系为基于附图所示的方位或位置关系,或是该发明产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
47.术语“第一”、“第二”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
48.在本实施例的描述中,还需要说明的是,除非另有明确的规定和限定,术语“设置”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实施例中的具体含义。
49.为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明的实施方式作进一步地详细描述。
50.为解决现有技术中在车辆设计阶段,由于车辆在高速行驶过程中引起方向盘摆振的因素是多种多样的,很难准确地找到影响方向盘发生摆振的原因,不利于设计师对方向盘摆振进行优化的问题,本发明实施方式公开了一种车辆方向盘摆振优化方法,在执行该车辆方向盘摆振优化方法之前还包括以下步骤:
51.将车辆以速度v行驶时,获取方向盘的当前x向加速度,判断当前x向加速度是否大于加速度阈值,其中速度v大于预设速度阈值,x向与车辆的长度方向平行;若是,则判断方
向盘发生摆振,执行该车辆方向盘摆振优化方法;若否,则判断方向盘未发生摆振,不执行该车辆方向盘摆振优化方法。预设速度阈值可以为100km/h,加速度阈值可以为1m/s2。
52.本发明实施方式公开了一种车辆方向盘摆振优化方法,如图1所示,包括以下步骤:
53.s1:采集影响方向盘摆振的部件的关联参数,其中,部件包括车轮、制动盘、传动轴、摆臂衬套、螺旋簧、以及转向机扭簧中的至少一种。
54.图2为一种车辆的方向盘以及本发明提供的影响方向盘的部件的结构示意图。车辆上的方向盘100、车轮200、制动盘300、传动轴400、摆臂衬套500、螺旋簧600、以及转向机扭簧700的具体位置,如图2所示,其中车轮200包括轮胎210和轮毂220,轮毂220包括轮辋221,轮辋221表示轮毂220的最外圈。
55.本实施方式中,可以采集车轮、制动盘、传动轴、摆臂衬套、螺旋簧、以及转向机扭簧等影响方向盘的部件的关联参数中的任意一种,例如只采集车轮的关联参数,或只采集制动盘的关联参数。也可以采集上述部件的关联参数中的任意两种,例如采集传动轴的关联参数和摆臂衬套的关联参数,或采集制动盘的关联参数和传动轴的关联参数,还可以采集上述部件的关联参数中的任意三种,或更多种,本领域技术人员可以根据需要进行选择,本实施方式对此不做具体限制。
56.需要说明的是,本实施方式中,车轮的关联参数包括轮胎侧向力、轮胎径向力、轮辋内侧动不平衡量、轮辋外侧动不平衡量、车轮动不平衡量、以及轮辋与轮毂轴承配合间隙中的至少一种。采集车轮的关联参数可以采集车轮的关联参数中任意一种或几种,例如可以采集任意一种,可以只采集轮胎侧向力、也可以只采集轮胎径向力、还可以只采集其他车轮的关联参数;还可以采集任意两种,例如可以同时采集轮胎侧向力和轮胎径向力传动轴,还可采集车轮的关联参数中任意三种或者更多种,本领域技术人员可以根据实际情况选择,本实施方式对此不做具体限制。传动轴的关联参数包括传动轴节型和传动轴夹角中的至少一种,采集传动轴的关联参数可以只采集传动轴节型,也可以只采集传动轴夹角,还可以采集传动轴节型和传动轴夹角,本领域技术人员可以根据实际情况选择,本实施方式对此不做具体限制。
57.s2:检测关联参数,并判断关联参数是否满足目标要求;若否,则优化关联参数。
58.本实施方式中,如果步骤s1中只采集了车轮的关联参数,需要检测对应的车轮的关联参数,并判断对应的车轮的关联参数是否满足车轮目标要求。如果步骤s1中采集传动轴的关联参数和摆臂衬套的关联参数,对应的需要检测传动轴的关联参数和摆臂衬套的关联参数,并判断传动轴的关联参数是否满足传动轴目标要求,摆臂衬套的关联参数是否满足摆臂衬套目标要求。
59.需要说明的是,方向盘发生摆振,执行该车辆方向盘摆振优化方法的步骤s2时,若关联参数满足目标要求,不在本发明提供的车辆方向盘摆振优化方法的讨论范围内,本领域技术人员可以按照其他它优化方法对方向盘摆振进行优化。
60.s3:将优化关联参数后的车辆以速度v行驶,获取方向盘的当前x向加速度,根据当前x向加速度与加速度阈值的比较结果判断方向盘是否发生摆振;其中,速度v大于预设速度阈值,x向与车辆的长度方向平行。
61.若当前x向加速度大于加速度阈值,则判断为方向盘发生摆振,继续步骤s2;若当
前x向加速度小于或等于加速度阈值,则判断为方向盘未发生摆振,结束优化步骤。
62.本实施方式中,可以通过在车辆的方向盘上设置加速度传感器来获取方向盘的当前x向加速度。在其中一种具体实施方式中,加速度阈值为1m/s2。在其中一种具体实施方式中,预设速度阈值为100km/h。
63.本实施方式中,例如,步骤s2中检测的是车轮的关联参数,步骤s3中判断当前x向加速度大于加速度阈值,继续步骤s2可以继续检测除了车轮的关联参数外的其他部件的关联参数。如果检测的是车轮的关联参数中的一种,例如是轮胎侧向力,步骤s3中判断当前x向加速度大于加速度阈值,继续步骤s2可以继续检测除车轮的关联参数外的其他部件的关联参数、还可以继续检测除选择的那一种车轮的关联参数外的其他车轮的关联参数(轮胎径向力、轮辋内侧动不平衡量、轮辋外侧动不平衡量、车轮动不平衡量、以及轮辋与轮毂轴承配合间隙)。
64.采用上述技术方案,在车辆设计阶段,若方向盘的当前x向加速度大于加速度阈值,则方向盘产生摆振,通过检测并优化车轮、制动盘、传动轴、摆臂衬套、螺旋簧、以及转向机扭簧中的至少一种影响方向盘的部件的关联参数,使方向盘摆振达到目标要求即使方向盘的当前x向加速度小于或等于加速度阈值,这样能够准确地找到车辆在高速行驶过程中影响方向盘发生摆振的原因,提高方向盘摆振优化的工作效率,从而提高车辆的使用寿命和用户乘坐的舒适性。另外,此方案可以运用到各个车辆车型方向盘产生摆振时的优化中。
65.在一种具体实施方式中,部件包括车轮、制动盘、传动轴、摆臂衬套、螺旋簧、以及转向机扭簧;步骤s2包括:
66.s21:检测车轮的关联参数,判断车轮的关联参数是否满足车轮目标要求;其中,车轮的关联参数包括轮胎侧向力、轮胎径向力、轮辋内侧动不平衡量、轮辋外侧动不平衡量、车轮动不平衡量、以及轮辋与轮毂轴承配合间隙。在其中一种具体实施方式中,车轮目标要求包括轮胎侧向力小于或等于轮胎侧向力阈值,轮胎径向力小于或等于轮胎径向力阈值,轮辋内侧动不平衡量小于或等于轮辋内侧动不平衡量阈值,轮辋外侧动不平衡量小于或等于轮辋外侧动不平衡量阈值,车轮动不平衡量小于或等于车轮动不平衡量阈值,其中车轮包括轮胎、轮毂、以及气门嘴,轮辋与轮毂轴承配合间隙小于或等于间隙阈值。在其中一种具体实施方式中,轮胎侧向力阈值为6kgf,轮胎径向力阈值为9kgf,轮辋内侧动不平衡量阈值为20g
·
mm,轮辋外侧动不平衡量阈值为30g
·
mm,车轮动不平衡量阈值为5g
·
cm,间隙阈值为54.1um。
67.若是,则进入步骤s22;
68.若否,则优化车轮的关联参数,以使车轮的关联参数满足车轮目标要求,并继续执行步骤s3,其中若判断当前x向加速度大于加速度阈值,则进入步骤s22。
69.要说明的是,本实施方式中,步骤s21可以包括:先检测并判断轮胎侧向力是否小于或等于轮胎侧向力阈值,之后再检测并判断轮胎径向力是否小于或等于轮胎径向力阈值,之后再检测并判断轮辋内侧动不平衡量是否小于或等于轮辋内侧动不平衡量阈值,之后再检测并判断轮辋外侧动不平衡量是否小于或等于轮辋外侧动不平衡量阈值,之后再检测并判断车轮动不平衡量是否小于或等于车轮动不平衡量阈值,最后检测并判断轮辋与轮毂轴承配合间隙是否小于或等于间隙阈值。步骤s21也可以包括按照其他顺序检测并判断车轮的关联参数是否满足车轮目标要求,例如先检测并判断轮辋与轮毂轴承配合间隙是否
小于或等于间隙阈值,最后检测并判断轮胎侧向力是否小于或等于轮胎侧向力阈值,本实施方式对此不做具体限制。
70.如果检测到一个车轮的关联参数不满足车轮目标要求,对应的车轮的关联参数就需要进行优化。本实施方式中,可以对所有的车轮的关联参数都进行检测和判断,若其中有一部分车轮的关联参数不满足车轮目标要求,统一对不满足要求的车轮关联参数进行优化。也可以检测并判断一个车轮的关联参数不满足要求后,就对该车轮的关联参数进行优化,例如先检测并判断轮胎侧向力是否小于或等于轮胎侧向力阈值,若否,则优化轮胎侧向力,之后检测并判断轮胎径向力是否小于或等于轮胎径向力阈值,若否,则优化轮胎径向力,之后继续进行下一个参数的检测,本实施方式对此不做具体限制。
71.s22:检测制动盘的关联参数,判断制动盘的关联参数是否满足制动盘目标要求;其中制动盘的关联参数包括制动盘静不平衡量,制动盘目标要求包括制动盘静不平衡量小于或等于制动盘静不平衡量阈值。在其中一种具体实施方式中,制动盘静不平衡量阈值为50g
·
mm。
72.若是,则进入步骤s23;
73.若否,则优化制动盘静不平衡量,以使制动盘静不平衡量小于或等于制动盘静不平衡量阈值,并继续执行步骤s3,其中若判断当前x向加速度大于加速度阈值,则进入步骤s23。
74.s23:检测传动轴的关联参数,判断传动轴的关联参数是否满足传动轴目标要求;其中,传动轴的关联参数包括传动轴节型和传动轴夹角。在其中一种具体实施方式中,传动轴目标要求包括传动轴节型为目标传动轴节型、传动轴夹角小于传动轴夹角阈值。在其中一种具体实施方式中,目标传动轴节型为三段式aar节型,传动轴夹角阈值小于或等于3
°
。具体地,传动轴夹角阈值可以为3
°
、可以为2
°
、还可以为1
°
,还可以为0
°
~3
°
之间的其他角度,本领域技术人员可以根据需要设置,本实施方式对此不做具体限制。
75.若是,则进入步骤s24;
76.若否,则优化传动轴的关联参数,以使传动轴的关联参数满足传动轴目标要求,并继续执行步骤s3,其中若判断当前x向加速度大于加速度阈值,则进入步骤s24。
77.需要说明的是,本实施方式中,可以先检测并判断传动轴节型是否为目标传动轴节型,若否,则对传动轴节型进行优化,即替换为目标传动轴节型。之后在目标传动轴节型的基础上检测并判断传动轴夹角是否小于传动轴夹角阈值,若否,则优化传动轴夹角,使传动轴夹角小于传动轴夹角阈值。
78.s24:检测摆臂衬套的关联参数,判断摆臂衬套的关联参数是否满足摆臂衬套目标要求;其中,摆臂衬套的关联参数包括摆臂衬套刚度,摆臂衬套目标要求包括摆臂衬套刚度偏差在偏差阈值范围内;需要说明的是,摆臂衬套刚度偏差指的是摆臂衬套刚度与目标刚度之差与目标刚度的比值的百分数;在其中一种具体实施方式中,偏差阈值范围为-15%~15%。
79.若是,则进入步骤s25;
80.若否,则优化摆臂衬套刚度,以使摆臂衬套刚度偏差在偏差阈值范围内,并继续执行步骤s3,其中若判断当前x向加速度大于加速度阈值,则进入步骤s25。
81.s25:检测螺旋簧的关联参数,判断螺旋簧的关联参数是否满足螺旋簧目标要求;
其中,螺旋簧的关联参数包括螺旋簧刚度,螺旋簧目标要求包括螺旋簧刚度在螺旋簧刚度阈值范围;在其中一种具体实施方式中,螺旋簧刚度阈值范围为20n/mm~30n/mm。
82.若是,则进入步骤s26;
83.若否,则优化螺旋簧刚度,以使螺旋簧刚度在螺旋簧刚度阈值范围,并继续执行步骤s3,其中若判断当前x向加速度大于加速度阈值,则进入步骤s26;
84.s26:检测转向机扭簧的关联参数,判断转向机扭簧的关联参数是否满足转向机扭簧目标要求;其中,转向机扭簧的关联参数包括转向机扭簧刚度,转向机扭簧目标要求包括转向机扭簧刚度在转向机扭簧刚度阈值范围内;在其中一种具体实施方式中,转向机扭簧刚度阈值范围为48.4n/mm~55.6n/mm;若否,则优化转向机扭簧刚度,以使转向机扭簧刚度在转向机扭簧刚度阈值范围内,并继续执行步骤s3,直至当前x向加速度小于或等于加速度阈值。
85.需要说明的是,步骤s26中,若转向机扭簧的关联参数满足转向机扭簧目标要求,说明影响方向盘摆振的部件的关联参数均满足要求,但是当前x向加速度大于加速度阈值,即方向盘仍然发生摆振,可以继续执行步骤s21~s25中的任意一个步骤,在各步骤中对应的部件的关联参数满足对应的目标要求的基础上,使部件的关联参数远离对应的阈值,直至当前x向加速度小于或等于加速度阈值。例如可以继续执行步骤s21,可以在轮胎侧向力小于或等于轮胎侧向力阈值的基础上,取较小的轮胎侧向力,具体地,两种不同的轮胎获取到两种的轮胎侧向力分别为5.5kgf和5.9kgf,均小于轮胎侧向力阈值6kgf,取轮胎侧向力为5.5kgf对应的轮胎;也可以在车轮动不平衡量小于或等于车轮动不平衡量阈值的基础上,取较小的车轮动不平衡量。也可以继续执行步骤s23,可以在传动轴夹角小于传动轴夹角阈值的基础上,取较小的传动轴夹角,直至当前x向加速度小于或等于加速度阈值。
86.本实施方式中,还可以按照其他顺序检测车轮、制动盘、传动轴、摆臂衬套、螺旋簧、以及转向机扭簧等部件的关联参数,再判断是否满足对应的目标要求,如果不满足要求再做对应的优化。例如可以依次检测转向机扭簧的关联参数、螺旋簧的关联参数、摆臂衬套的关联参数、车轮的关联参数、制动盘的关联参数、传动轴的关联参数,还可以按照其他顺序检测上述部件的关联参数,本实施方式对此不做具体限制。
87.采用上述技术方案,方向盘发生摆振后,通过依次检测和判断车轮、制动盘、传动轴、摆臂衬套、螺旋簧、以及转向机扭簧等影响方向盘的部件的关联参数是否满足各部件的目标要求,如果不满足目标要求或方向盘的振动不满足要求,对应的依次优化各部件的关联参数,以使方向盘振动达到目标要求即当前x向加速度小于或等于加速度阈值,能够使得车辆方向盘发生摆振后的优化方向更加具体,节省优化时间,提高了优化的效率。
88.在一种具体实施方式中,优化制动盘静不平衡量包括调整制动盘静不平衡量、以及更换制动盘中的至少一种;优化摆臂衬套刚度为更换摆臂衬套;优化螺旋簧刚度为更换螺旋簧;优化转向机扭簧刚度为更换转向机扭簧。
89.具体地,优化制动盘静不平衡量,即优化制动盘的的不平衡力矩,可以只调整制动盘静不平衡量,具体可以在制动盘上设置不同重量、不同位置的平衡块,通过调整平衡块的位置和/或重量调整制动盘静不平衡量。还可以更换制动盘,制动盘包括通风盘和实心盘,一般而言,通风盘的不平衡量小于或等于90g
·
mm,实心盘的不平衡量小于或等于50g
·
mm,即实心盘的不平衡力矩小于或等于目标力矩,如果目前采用的是通风盘,可以将通风盘更
换为实心盘。还可以先更换制动盘,之后再调整制动盘静不平衡量,以使制动盘静不平衡量小于或等于制动盘静不平衡量阈值即可,本实施方式对此不做具体限制。
90.在一种具体实施方式中,优化车轮的关联参数包括优化轮胎侧向力、优化轮胎径向力、优化轮辋内侧动不平衡量、优化轮辋外侧动不平衡量、优化车轮动不平衡量、以及优化轮辋与轮毂轴承配合间隙;其中优化轮胎侧向力为更换轮胎;优化轮胎径向力为更换轮胎;优化轮辋内侧动不平衡量包括调整轮辋内侧动不平衡量、以及更换轮辋中的至少一种;优化轮辋外侧动不平衡量包括调整轮辋外侧动不平衡量、以及更换轮辋中的至少一种;优化车轮动不平衡量包括调整车轮动不平衡量、更换车轮中的至少一种,其中更换车轮包括更换轮胎、更换轮毂、以及更换气门嘴中的至少一种;优化轮辋与轮毂轴承配合间隙为更换轮毂。
91.具体地,本实施方式中,优化轮辋内侧动不平衡量可以只调整轮辋内侧动不平衡量,即可以在轮辋内侧的不同位置设置不同重量的平衡块,通过调整平衡块的位置和/或重量调整轮辋内侧动不平衡量;还可以直接更换轮辋,由于轮辋属于轮毂的外圈,更换轮辋实际上是更换整个轮毂;还可以先更换轮毂后,再调整轮辋内侧动不平衡量,以使轮辋内侧动不平衡量小于或等于轮辋内侧动不平衡阈值即可,本实施方式对此不做具体限制。同理优化轮辋外侧动不平衡量可以只调整轮辋外侧动不平衡量,也可以只更换轮毂,还可以既更换轮毂又调整轮辋外侧动不平衡量,以使轮辋外侧动不平衡量小于或等于轮辋外侧动不平衡量阈值即可,本实施方式对此不做具体限制。
92.本实施方式中,优化车轮动不平衡量可以只调整车轮动不平衡量,即可以在车轮上设置不同重量的平衡块,通过调整平衡块的位置和/或重量调整车轮动不平衡量,还可以只更换车轮,还可以既更换车轮也调整车轮动不平衡量,以使车轮动不平衡量小于或等于车轮动不平衡量阈值即可,本实施方式对此不做具体限制。其中,更换车轮可以是更换轮胎,更换轮毂、以及更换气门嘴中的任意一种,例如可以只更换轮胎,还可以只更换轮辋,还可以只更换气门嘴。还可以包括更换轮胎、更换轮毂、以及更换气门嘴中的任意两种,还可以包括更换轮胎、更换轮毂、以及更换气门嘴三种,本实施方式对此不做具体限制。
93.在一种具体实施方式中,优化传动轴的相关参数包括优化传动轴节型、以及优化传动轴夹角;其中优化传动轴节型为更换传动轴;优化传动轴夹角包括调整传动轴夹角、以及更换传动轴中的至少一种。
94.具体地,本实施方式中,优化传动轴夹角可以只调整传动轴夹角,即通过调整传动轴的左右半轴布置形式,调整传动轴间隙以调整传动轴夹角,还可以直接更换传动轴,以使传动轴夹角小于传动轴夹角阈值即可,本实施方式对此不做具体限制。
95.本实施方式中,车辆在优化前轮胎侧向力为8kgf,轮胎径向力为10kgf,优化后轮胎侧向力为6kgf,轮胎径向力为9kgf,获取的方向盘3点x向振动的加速度由6.5m/s2降为4.1m/s2,方向盘摆振改善明显。上述车辆优化前轮辋(带气门嘴)内、外侧动不平衡量均为30g
·
mm,优化后轮辋内侧动不平衡量为20g
·
mm、轮辋外侧动不平衡量为30g
·
mm,获取的方向盘3点x向振动的加速度由4.1m/s2降为3.3m/s2,方向盘摆振得到改善。上述车辆优化后车轮动不平衡量为8g
·
cm,调整粘贴在轮辋内侧的车轮平衡块的位置和重量后,即优化后车轮动不平衡量为5g
·
cm,获取的方向盘3点x向振动的加速度由3.3m/s2降为3.1m/s2,方向盘摆振得到改善。上述车辆优化前轮辋与轮毂轴承配合间隙为60.1um,优化后为54.1um,优
化前配合精度范围为 0.10~ 0.20,优化后配合精度范围为 0.05~ 0.10,优化后减小配合间隙并控制配合精度,方向盘3点x方向的加速度振动值由3.1m/s2降低到2.9m/s2,方向盘摆振得到改善。
96.本实施方式中,上述车辆优化前制动盘静不平衡量为90g
·
mm,优化后制动盘静不平衡量为50g
·
mm,方向盘3点x方向的加速度振动值由2.9m/s2降低到2.7m/s2,方向盘摆振得到改善。
97.本实施方式中,上述车辆优化前考虑到成本原因,传动轴采用两段式bj tj节型,优化后传动轴节型进行重新匹配,采用aar三段式传动轴。经对aar节和两段式(左侧短轴)对比测试,方向盘3点x向振动的加速度由2.7m/s2降为1.5m/s2,方向盘摆振得到改善。上述车辆优化前传动轴夹角为5
°
,通过调整左右半轴布置形式,降低传动轴间隙,传动轴夹角为3
°
,获取的向盘3点x向振动的加速度由1.5m/s2降为1.2m/s,方向盘摆振得到改善。
98.本实施方式中,上述车辆优化前摆臂衬套刚度偏差为20%,优化后前摆臂衬套刚度偏差为15%,这样能够保证悬架系统保持隔振,避免高速行驶时振动传递至方向盘,方向盘3点x向振动的加速度由1.2m/s2降为1.1m/s2,方向盘摆振得到改善。
99.本实施方式中,上述车辆优化前螺旋簧刚度为45n/mm,优化后螺旋簧刚度为26n/mm,方向盘3点x方向的加速度振动值由1.1m/s2降低到0.9m/s2,方向盘摆振得到改善。
100.本实施方式中,上述车辆优化前转向机扭簧刚度为60n/mm,优化后转向机扭簧刚度为52n/mm,方向盘3点x方向的加速度振动值由0.9m/s2降低到0.7m/s2,方向盘摆振得到改善。
101.本发明提供了一种车辆方向盘摆振优化方法,在车辆设计阶段,方向盘产生摆振,通过检测并优化车轮、制动盘、传动轴、摆臂衬套、螺旋簧、以及转向机扭簧中的至少一种影响方向盘的部件的关联参数,使方向盘摆振达到目标要求即使方向盘的当前x向加速度小于或等于加速度阈值,这样能够准确地找到车辆在高速行驶过程中影响方向盘发生摆振的原因,使得优化方向更加具体,从而提高方向盘摆振优化的工作效率,进一步提高车辆的使用寿命和用户乘坐的舒适性。另外,此方案可以运用到各个车辆车型方向盘产生摆振时的优化中。
102.本实施方式还公开了一种确定影响方向盘摆振的部件的方法,首先分别在方向盘的3点、9点布置三向加速度传感器,在左右前轮轮辋垂直方向0点各布置15g平衡块,左右前轮胎侧布置光电传感器。分别在工况1、工况2、以及工况3下进行试验;其中,工况1为用光电传感器跟踪轮辋,保证两个轮胎所配平衡块同向运动,测试方向盘的振幅;工况2为用光电传感器跟踪轮辋,保证两个轮胎所配平衡块反向运动,测试方向盘的振幅;工况3为去掉平衡块,测试方向盘振幅。
103.其次,在轮辋0点位置布置平衡块,轮辋0点位置的响应a0的计算公式为:
104.a0=(&1-&0)/mr,并且&1=arctan((x
1(
配重)-x2(配重))/2r);&0=arctan((x
1-x2)/2r)
105.其中,x1为轮胎上不布置平衡块3点加速度计测得的x向1阶振动幅值;x2为轮胎上不布置平衡块9点加速度计测得的x向1阶振动幅值;x1(配重)为轮胎上布置平衡块后3点加速度计测得的整车x向1阶振动幅值;x2(配重)为轮胎上布置平衡块后9点加速度计测得的整车x向1阶振动幅值;r为方向盘半径;m为平衡块质量;r为轮胎半径。
106.在轮辋0点位置不布置平衡块,轮辋0点位置的响应a0的计算公式为a'0=-&0/mr
107.同理,依次分别在轮辋3点位置、6点位置、轮辋9点位置布置平衡块后,测量轮胎上布置平衡块后方向盘3点、9点整车x向1阶振动幅值,可以计算出轮辋3点位置的响应a
90
、轮辋6点位置的响应a
180
、轮辋9点位置的响应a
270
。
108.进一步,计算灵敏度s,灵敏度s表示左右轮胎同相位布置平衡块的方向盘上响应与异相位布置平衡块的方向盘上响应敏感程度。灵敏度s计算公式如下:
[0109][0110]
其中,a0为轮辋0点位置布置平衡块的响应,a
90
为轮辋3点位置布置平衡块的响应,r为方向盘半径,m为平衡块质量,r为轮胎半径,ω为角加速度,j为-1、0、1,其中当左右前轮辋平衡块相位相差90
°
或270
°
时,j取-1;相位相差0
°
时,j取1;相位相差180
°
时,j取0。
[0111]
即通过a0及a
90
确定灵敏度s,同时也可通过a0、a
180
,或a0、a
270
,或a
90
、a
180
,或a
90
、a
270
,或a
180
、a
270
计算灵敏度,还可以计算多个灵敏度,再求算术平均值确定最终的灵敏度,本实施方式对此不做具体限制。
[0112]
本实施方式中,通过上述方法计算的配重后方向盘同相位灵敏度和配重后异相位灵敏度如表1所示。
[0113]
表1
[0114]
灵敏度配重后同相位灵敏度配重后异相位灵敏度方向盘0.041.56
[0115]
如表1所示,配重后异相位灵敏度为1.56,配重后同相位灵敏度为0.04,配重后异相位指的是左右前轮胎平衡块反向运动,配重后同相位指的是左右前轮胎平衡块同向运动,通过配重后同相位灵敏度和异相位灵敏度结果对比可知方向盘针对左右前轮胎平衡块呈反向运动时更加敏感。
[0116]
本实施方式中,车辆以100km/h匀速行驶时,分别在两个轮胎所配平衡块同向运动、两个轮胎所配平衡块反向运动、以及两个轮胎去掉平衡块条件下,获取的方向盘3点振动x向加速度和方向盘9点振动x向加速度,如表2所示。
[0117]
表2
[0118][0119]
如表2所示,两个轮胎所配平衡块反向运动时,方向盘3点振动x向加速度为6m/s2,明显大于两个轮胎所配平衡块同向运动时方向盘3点振动x向加速度3.6m/s2,且也大于两个轮胎去掉平衡块时方向盘3点振动x向加速度3.3m/s2。通过配重后同相位灵敏度和异相
位方向盘振动结果对比可知,方向盘针对左右前轮胎平衡块呈反向运动时更加敏感。
[0120]
之后,分别在车辆的方向盘3点、9点、左右轮心位置布置三向加速度传感器,以副车架为参考点,建立模型,做ods分析。通过ods振型可知,0~20.37s是方向盘摆振的最大值段,此时悬架呈异向位置摆动,37~48s是方向盘摆振的最小值段,此时悬架呈同向位置摆动,悬架异向摆动会导致方向盘摆振。
[0121]
异相位的激励是车辆在高速行驶时方向盘发生摆振的主要诱因,异相位的激励主要来自悬架系统,因此,影响方向盘摆振的部件包括车轮、制动盘、传动轴、前摆臂、前减震器总成、以及转向机;其中,前摆臂包括摆臂衬套螺旋簧,前减震器总成包括螺旋簧,转向机包括转向机扭簧。轮胎侧向力、轮胎径向力、轮辋内外侧动不平衡量、车轮动不平衡量、轮辋与轮毂轴承配合间隙、制动盘静不平衡量、传动轴节型、传动轴夹角、摆臂衬套刚度、螺旋簧刚度、转向机扭簧刚度是引起异响位激励的主要原因,从而引起方向盘摆振。
[0122]
采用上述技术方案,确定了轮胎侧向力、轮胎径向力、轮辋内外侧动不平衡量、车轮动不平衡量、轮辋与轮毂轴承配合间隙、制动盘静不平衡量、传动轴节型、传动轴夹角、摆臂衬套刚度、螺旋簧刚度、转向机扭簧刚度是引起异响位激励的主要原因,从而引起方向盘摆振。之后可以按照上述车辆方向盘摆振优化方法进行优化,提高方向盘摆振优化的工作效率,进一步提高车辆的使用寿命和用户乘坐的舒适性。
[0123]
通过参照本发明的某些优选实施方式,已经对本发明进行了图示和描述,但本领域的普通技术人员应该明白,以上内容是结合具体的实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。本领域技术人员可以在形式上和细节上对其作各种改变,包括做出若干简单推演或替换,而不偏离本发明的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。