1.本发明创造涉及自动化领域,特备是涉及一种触头支持组装机。
背景技术:
2.触头支持为断路器内对动触头或者静触头进行支持的部件,触头支持包括触头元件和扭簧元件。原工艺为全人工进行产品组装,组装时需要将扭簧手动张开并装配的触头内。原作业方法员工劳动强度大,劳动生产率不高;在产量逐年增长的情况下,人工操作效率低且成本高。
技术实现要素:
3.本发明的目的在于克服现有技术的缺陷,提供一种装配效率高的触头支持组装机。
4.为实现上述目的,本发明采用了如下技术方案:
5.一种触头支持组装机,包括触头支持装配机构和载具,触头支持装配机构包括张开组件和第一抓取组件,载具包括第一安装槽,第一安装槽设有包括层叠且连通的的容纳扭簧的扭簧槽和扭簧槽上方的用于容纳触头支持板的触头支持板槽,张开组件位于载具一侧用于驱动载具内的扭簧的端脚张开,第一抓取组件用于将触头支持板装入第一安装槽内与扭簧装配。
6.优选地,所述触头支持装配机构还包括第一支架、第一横移组件、第一升降组件和第一抓取组件;
7.所述张开组件设于第一支架上位于载具一侧,所述第一抓取组件与第一升降组件相连;
8.所述第一升降组件与第一横移组件相连并用于带动第一抓取组件上下升降;
9.所述第一横移组件设于第一支架上并用于带动第一升降组件水平横移。
10.优选地,所述张开组件包括推进气缸和用于张开扭簧的推块;所述推进气缸连接于第一支架上,所述推进块与推进气缸的活塞杆相连。
11.优选地,所述第一抓取组件包括第一气缸和卡爪,第一气缸为双杆气缸,第一气缸设于第一升降组件上,卡爪共有两组并且沿着两者之间的中间位置对称设置,卡爪设于第一气缸的下方并与第一气缸的活塞杆相连,两个卡爪分别位于相邻载具上触头支持板的两侧。
12.优选地,所述卡爪的侧壁上开设有能够与触头支持板紧密贴合的圆弧形的夹紧槽。
13.优选地,所述第一升降组件包括第二气缸、第一滑轨和第一滑块,所述第二气缸设于第一横移组件上,所述第一滑轨设于第一横移组件上,所述第一滑块与第二气缸的活塞杆相连并与第一滑轨竖直滑移连接。
14.优选地,所述第一横移组件包括第三气缸、第二滑轨和第二滑块;第三气缸设于第
一支架上,第二滑轨设置在第一支架上,所述第二滑块与第三气缸的活塞杆相连并且水平滑移连接在第二滑轨上。
15.优选地,还包括传送机构、扭簧上料机构、触头上料机构和触头支持出料机构;
16.所述传送机构依次传送载具到扭簧上料机构、触头上料机构、触头支持装配机构和触头支持出料机构;
17.所述扭簧上料机构用于抓取扭簧并将其安装到载具上;
18.所述触头上料机构用于抓取触头支持板并将其安装到载具上;
19.所述触头支持装配机构用于将触头支持板装配到扭簧上;
20.所述触头支持出料机构用于将装配完成的触头支持送出。
21.优选地,所述触头支持出料机构包括第二支架、第二抓取组件、第二横移组件、第二升降组件和出料槽;
22.所述第二抓取组件与第二横移组件相连并用于抓取触头支持并将触头支持放置到出料槽内;
23.所述第二横移组件与第二升降组件相连并用于带动第二抓取组件水平移动;
24.所述第二升降组件设于第二支架上并用于带动第二横移组件上下移动;
25.所述出料槽用于接收触头支持并出料。
26.优选地,所述第二抓取组件与第一抓取组件结构相同。
27.优选地,所述第二升降组件包括第一升降气缸、第三滑轨和第三滑块;所述第一升降气缸设于第二横移组件上,第三滑轨设于第一升降气缸的下部,第三滑块与第一升降气缸的活塞杆相连并且第三滑块与第三滑轨竖直滑移连接;所述第二横移组件包括第一横移气缸、第四滑轨和第四滑块;第一横移气缸水平设于第二支架上,第四滑轨共有两组并且并排水平设于第一横移气缸的上下侧,第四滑块与第一横移气缸的活塞杆相连并且水平滑移连接在第四滑轨上。
28.优选地,所述出料槽的底部设有不良品排料机构,不良品排料机构包括排料气缸和滑板;排料气缸与出料槽的底部相连,滑板与出料槽的内壁滑移连接,出料槽对应滑板的位置处开设有开口,开口的下方设有不良品盒子。
29.优选地,还包括预压检测机构,所述预压检测机构包括支撑座、检测气缸和检测头,所述检测气缸安装在支撑座上活塞杆朝下,检测头设于检测气缸活塞杆的端部,所述检测头上设有用于检测触头支持板和扭簧的ccd检测仪。
30.优选地,还包括余料检测机构,所述余料检测机构设于传送机构上,余料检测机构包括检测组件和余料出料组件;
31.所述检测组件用于检测基座内是否还剩余有触头支持;
32.所述余料出料组件用于对剩余的触头支持进行出料。
33.优选地,所述检测组件包括第三支架、第四气缸、连接板和检测柱;所述第三支架连接于传送机构上,第四气缸竖直设于第三支架上,所述第四气缸的活塞杆与第三支架相连,第三支架上设有竖直设置的轨道,第四气缸滑移连接于轨道上;所述连接板与第四气缸的本体相连,检测柱设于相邻基座内第一安装槽的正上方,所述检测柱的底部设有吸盘。
34.优选地,所述余料出料组件包括第四支架、余料气缸、推杆和推头;第四支架连接于传送机构上,余料气缸设于第四支架上,推杆与余料气缸的活塞杆相连,推头连接于推杆
远离余料气缸的一端。
35.优选地,检测组件的下方设有导向板,所述导向板对应推杆的位置处开设有水平设置的导向滑道,所述推杆滑移连接于导向滑道内。
36.优选地,所述扭簧检测机构包括第五支架、检测箱和检测杆;所述第五支架设于传送机构上,检测箱与第五支架相连,所述检测杆设于两个第一安装槽和两个第二安装槽的上方,所述检测杆的下方设有感应器。
37.优选地,所述传送机构包括传送平台和载具,所述传送平台为圆环形传送平台;传送机构、扭簧上料机构、触头上料机构、触头支持装配机构和触头支持出料机构依次沿着传送平台的四周分布,所述载具至少设有一组并沿着传送平台的顶部边缘处间隔均匀分布。
38.优选地,所述扭簧上料机构包括第六支架、第三横移组件、第三升降组件和第三抓取组件;
39.所述第三抓取组件与第三升降组件相连并用于抓取扭簧;
40.所述第三升降组件与第三横移组件相连并用于带动第三抓取组件上下升降;所述第三横移组件设于第六支架上并用于带动第三升降组件水平横移。
41.优选地,所述第三抓取组件包括双向气缸和抓头,所述双向气缸连接于第三升降组件上,所述抓头共有两组并分别连接与双向气缸的两个端部相连,抓头的上部与双向气缸的端部相连、下部开设有与扭簧的内侧壁相贴的半圆柱面。
42.优选地,所述第三升降组件包括第二升降气缸、第五滑轨和第五滑块;第二升降气缸设于第二横移组件上,第五滑轨设于第二升降气缸的下部,第五滑块与第二升降气缸的活塞杆相连并且第五滑块与第五滑轨竖直滑移连接;所述第三横移组件包括第二横移气缸、第六滑轨和第六滑块;所述第二横移气缸水平设于第六支架上,第六滑轨设于第二横移气缸的侧方,第六滑块与第二横移气缸的活塞杆相连并且水平滑移连接在第六滑轨上。
43.优选地,所述触头上料机构包括包括第七支架、第四横移组件、第四升降组件和第四抓取组件;
44.所述第四抓取组件与第四升降组件相连并用于抓取触头支持板;
45.所述第四升降组件与第四横移组件相连并用于带动第四抓取组件上下升降;
46.所述第四横移组件设于第七支架上并用于带动第四升降组件水平横移。
47.优选地,所述四抓取组件与第一抓取组件和第二抓取组件的结构相同。
48.优选地,所述第四升降组件包括第三升降气缸、第七滑轨和第七滑块;所述第三升降气缸设于第三横移组件上,第七滑轨设于第三升降气缸的下部,所述第七滑块与第三升降气缸的活塞杆相连并且第七滑块与第七滑轨竖直滑移连接;所述第四横移组件包括第三横移气缸、第八滑轨和第八滑块;所述第三横移气缸水平设于第七支架上,第八滑轨设于第三横移气缸的侧方,第八滑块与第三横移气缸的活塞杆相连并且水平滑移连接在第八滑轨上。
49.优选地,所述扭簧上料机构和触头上料机构均设置有振动盘进行上料。
50.优选地,与扭簧上料机构相连的振动盘为第一振动盘,第一振动盘共有两组并且相互对称设置,与触头上料机构相连的振动盘为第二振动盘,第二振动盘为双料道振动盘,双料道振动盘能够同时输送两组触头支持板。
51.优选地,所述载具上还设有容纳触头支持板的第二安装槽。
52.优选地,所述第一安装槽设置在载具外侧,第二安装槽设置在载具内侧,第一安装槽和第二安装槽均有两组并且两组第一安装槽并排设置,两组第二安装槽并排设置。
53.本发明的断路器的触头支持组装机,通过触头支持装配机构和载具的设计,能够实现对触头支持板和扭簧的自动装配,特别的,本发明先将扭簧安装在载具上且将扭簧撑开,再将触头支持板设有安装槽的一侧向下安装扭簧,而不是传统的将扭簧套在触头支持板上,使得装配更加方便且设备的结构也更加简单。
54.此外,触头支持组装机能够实现对触头支持板和扭簧的自动上料、自动装配和自动出料,方便、快捷,自动化程度高,在保证其功能的前提下有效减少了人工成本,大幅度提高工作效率和管理成本。
附图说明
55.图1是本发明触头支持的结构示意图;
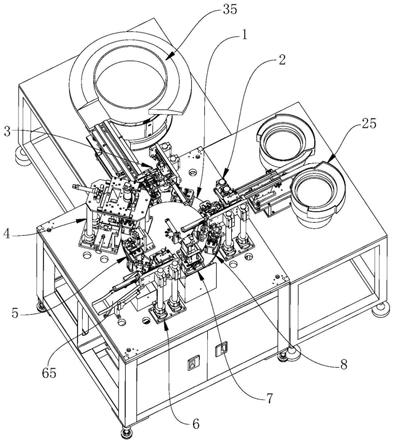
56.图2是本发明触头支持组装机的结构示意图;
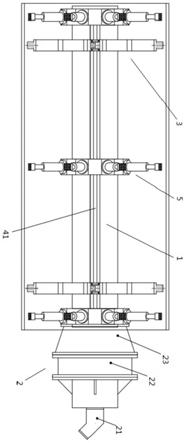
57.图3是本发明触头支持装配机构的结构示意图;
58.图4是本发明张开组件的结构示意图;
59.图5是本发明第一抓取组件的结构示意图;
60.图6是本发明传送机构的结构示意图;
61.图7是本发明预压检测机构的结构示意图;
62.图8是本发明触头支持出料机构的结构示意图;
63.图9是本发明出料槽的结构示意图;
64.图10是本发明余料检测机构的结构示意图;
65.图11是本发明余料出料组件的结构示意图;
66.图12是本发明扭簧检测机构的结构示意图;
67.图13是本发明扭簧上料机构的结构示意图;
68.图14是本发明第三抓取组件的结构示意图;
69.图15是本发明触头上料机构的结构示意图。
70.图中:1、传送机构;11、载具;111、第一安装槽;112、第二安装槽;12、内环;13、外环;2、扭簧上料机构;21、第六支架;22、第三横移组件;221、第二横移气缸;222、第六滑轨;223、第六滑块;23、第三升降组件;231、第二升降气缸;232、第五滑轨;233、第五滑块;24、第三抓取组件;241、双向气缸;242、抓头;2421、半圆柱面;25、第一振动盘;3、触头上料机构;31、第七支架;32、第四横移组件;321、第三横移气缸;322、第八滑轨;323、第八滑块;33、第四升降组件;331、第三升降气缸;332、第七滑轨;333、第七滑块;34、第四抓取组件;35、第二振动盘;4、触头支持装配机构;41、第一支架;42、张开组件;421、推进气缸;422、推块;43、第一横移组件;431、第三气缸;432、第二滑轨;433、第二滑块;44、第一升降组件;441、第二气缸;442、第一滑轨;443、第一滑块;45、第一抓取组件;451、第一气缸;452、卡爪;453、夹紧槽;5、预压检测机构;51、支撑座;52、检测气缸;53、检测头;6、触头支持出料机构;61、第二支架;62、第二抓取组件;63、第二横移组件;631、第一横移气缸;632、第四滑轨;643、第四滑块;64、第二升降组件;641、第一升降气缸;642、第三滑轨;643、第三滑块;65、出料槽;66、排料气缸;67、滑板;7、余料检测机构;71、检测组件;711、第三支架;712、第四气缸;713、连接
板;714、检测柱;715、导向板;72、余料出料组件;721、第四支架;722、余料气缸;723、推杆;724、推头;8、扭簧检测机构;81、第五支架;82、检测箱;83、检测杆;9、扭簧;91、触头;911、圆弧面。
具体实施方式
71.以下结合附图1至15给出的实施例,进一步说明本发明的触头支持组装机的具体实施方式。本发明的触头支持组装机不限于以下实施例的描述。
72.如图1所示,触头支持包括触头支持板91和扭簧9两部分,触头支持板91的中间位置开设有环形的安装槽,触头支持板91的两侧侧壁上均设有圆弧面911。在组装时,需要将扭簧9的两端脚张开并套入到安装槽内,松开扭簧9,扭簧9的两端脚共同配合卡在触头支持板91的一侧,完成装配。
73.一种触头支持组装机,如图2所示,包括传送机构1、扭簧上料机构2、触头上料机构3、触头支持装配机构4和触头支持出料机构6,用于实现触头支持的自动装配。传送机构1上设有用于承载触头支持板91和扭簧9的载具11,传送机构1用于将载具11依次移动到扭簧上料机构2、触头上料机构3、触头支持装配机构4和触头支持出料机构6位置处,扭簧上料机构2用于抓取扭簧9并将其安装到载具11上,触头上料机构3用于抓取触头支持板91并将其安装到载具11上,触头支持装配机构4用于将触头支持板91装配到扭簧9处,触头支持出料机构6用于将装配完成的触头支持送出。本发明的触头支持组装机能够实现对触头支持板91和扭簧9的自动上料、自动装配和自动出料,方便、快捷,自动化程度高,在保证其功能的前提下有效减少了人工成本,大幅度提高工作效率和管理成本。
74.为了防止出现不合格的产品,在触头支持装配机构4与触头支持出料机构6之间设有对装配情况进行检测的预压检测机构5,能够检测触头支持板91与扭簧9的装配合格情况。
75.为了防止载具11上剩余产品元件,在触头支持出料机构6的后方设置有余料检测机构7,如果存在余料,则将其转移至余料盒子。
76.为了防止扭簧9不易取出而留在载具11内,在触头支持板91支撑出料机构的后方设置有扭簧检测机构8,扭簧检测机构8用于将剩余的扭簧9取出,对载具11进行清料。
77.各机构的下方均设有底座,如图3和图4所示,触头支持装配机构4包括第一支架41、张开组件42、第一横移组件43、第一升降组件44和第一抓取组件45。第一支架41设于底座上,张开组件42设于第一支架41上并用于将载具11内的扭簧9两端脚张开,第一抓取组件45与第一升降组件44相连并用于抓取触头支持板91,第一升降组件44与第一横移组件43相连并用于带动第一抓取组件45上下升降,第一横移组件43设于第一支架41上并用于带动第一升降组件44水平横移。当载具11将触头支持板91和扭簧9送到触头支持装配机构4时,张开组件42将扭簧9张开,第一升降组件44带动第一抓取组件45下降,第一抓取组件45将触头支持板91从载具11内抓起,而后第一升降组件44带动触头支持板91上升,第一横移组件43带动触头支持板91移动到扭簧9的上方,此时扭簧9已经张开,第一升降组件44带动触头支持板91下降并放到扭簧9上,张开组件42回拉,扭簧9的两端脚自动回弹并卡在触头支持板91上,完成安装。通过对触头支持板91和扭簧9进行全自动组装,有效提高了触头支持加工的效率,减少了人力成本。
78.本发明的一个改进点在于触头支持装配机构4和载具11的设计,触头支持装配机构4包括张开组件42和第一抓取组件45,载具11包括第一安装槽111,第一安装槽111设有包括层叠且连通的的容纳扭簧9的扭簧槽和扭簧槽上方的用于容纳触头支持板91的触头支持板槽,安装在扭簧槽内的扭簧9的至少一端脚伸出扭簧槽外用于与张开组件42配合,张开组件42位于载具11一侧用于驱动载具11内的扭簧9的端脚张开,张开组件42驱动扭簧9的端脚张开后,第一抓取组件45将触头支持板91装入第一安装槽111内与扭簧9装配,张开组件42复位后共同配合卡在触头支持板91的一侧,完成装配,通过触头支持装配机构4和载具11实现了扭簧9和触头支持板的自动化装配,特别的,本发明先将扭簧9安装在载具11上且将扭簧撑开,再将触头支持板91设有安装槽的一侧向下安装扭簧9,而不是传统的将扭簧9套在触头支持板91上,使得装配更加方便且设备的结构也更加简单。如图1所示,载具11对应扭簧9的位置处开设有位于载具11外侧的第一安装槽111,扭簧9装载于第一安装槽111内,扭簧9的两端脚均位于载具11朝向传送机构1外部的一侧。参见图4,张开组件42包括推进气缸421和推块422。推进气缸421连接于第一支架41上,推块422与推进气缸421的活塞杆相连,并且推块422的一侧与扭簧9的两端脚相贴,推进气缸421的活塞杆伸张时,推动推块422朝向扭簧9的一侧移动,推块422同时挤压扭簧9的两端脚以将扭簧9张开。
79.如图5所示,第一抓取组件45包括第一气缸451和卡爪452。第一气缸451为双杆气缸,第一气缸451竖直设于第一升降组件44上,卡爪452共有两组并且沿着两者之间的中间位置对称设置,卡爪452设于第一气缸451的下方并与第一气缸451的活塞杆相连,两个卡爪452分别位于相邻载具11上触头支持板91的两侧,卡爪452的侧壁上开设有能够与触头支持板91紧密贴合的圆弧形的夹紧槽453。对触头支持板91进行抓取时,第一气缸451工作,带动两个卡爪452从两侧向触头支持板91的中间位置移动,直至内凹槽与触头支持板91的圆弧面911紧贴,以夹紧触头支持板91。
80.如图3所示,第一升降组件44包括第二气缸441、第一滑轨442和第一滑块443。第二气缸441竖直设于第一横移组件43上,第一滑轨442共有两组并且并排竖直设于第一横移组件43上,第一滑块443与第二气缸441的活塞杆相连并与第一滑轨442竖直滑移连接。第一滑块443上连接有安装座,第一气缸451均安装于安装座上。对触头支持板91进行抓取时,第二气缸441的活塞杆伸张,带动第一滑块443在第一滑轨442上滑动,第一滑块443带动第一抓取组件45下降进行抓取。
81.第一横移组件43包括第三气缸431、第二滑轨432和第二滑块433。第三气缸431水平设于第一支架41上,第二滑轨432共有两组并且并排水平设置在第一支架41上。第二滑块433与第三气缸431的活塞杆相连并且水平滑移连接在第二滑轨432上。第二滑块433包括水平部和竖直部,水平部和竖直部结合形成t形,水平部与第二滑轨432和第三气缸431相连,竖直部与第三气缸431和第一滑轨442相连。第三气缸431工作时,推动第二滑块433在第二滑轨432上水平滑动,第二滑块433带动第一升降组件44水平移动。
82.推进气缸421、第一气缸451、第二气缸441和第三气缸431上均设有感应器,感应器能够感应各气缸位置,触头支持装配机构4具体的工作流程如下:
83.s1载具11到达触头支持装配机构,载具11上放置有未装配的扭簧9和触头支持板91,推进气缸421上的感应器接收到信号,推进气缸421工作,推动推块422向前推进,张开扭簧9。
84.s2第三气缸431的活塞杆伸张,带动第一升降组件44和张开组件42移动至触头支持板91位置上方。
85.s3第二气缸441上的感应器接收到信号,第二气缸441的活塞杆伸张,带动张开组件42下降到触头支持板91处,两个卡爪452移动至触头支持板91两侧。
86.s4第一气缸451上的感应器接收到信号,第一气缸451的活塞杆驱动卡爪452,夹取触头支持板91。
87.s5第二气缸441上的感应器接收到信号,第二气缸441的活塞杆收缩,带动触头支持板91上移。
88.s6第三气缸431上的感应器接收到信号,第三气缸431的活塞杆收缩,带动触头支持板91移动到扭簧9上方。
89.s7第二气缸441上的感应器接收到信号,第二气缸441的活塞杆伸张,张开组件42下移,将触头支持板91放置到扭簧9上。
90.s8各感应器依次接收到信号,所有气缸依次返回原位,以进行下一次的装配。
91.重复s1-s8的步骤,能够将各载具11上的触头支持板91和扭簧9依次进行装配。
92.如图6所示,载具11外侧设有容纳扭簧9和装配后的触头支持的第一安装槽111,内侧上开设有容纳触头支持板91的第二安装槽112,第一安装槽111和第二安装槽112均有两组并且两组第一安装槽111并排设置,两组第二安装槽112并排设置,这样载具11上能够同时进行两组触头支持的加工,有效提高了加工效率。所述的第一安装槽111设有包括层叠且连通的的容纳扭簧9的扭簧槽和扭簧槽上方的触头支持板槽,扭簧9的至少一端脚伸出扭簧槽外用于与张开组件42配合。一种方式为扭簧9的一个端脚在扭簧槽内限位,另一个端脚伸出扭簧槽外,也可以伸到载具11外与张开组件42配合。一种方式为扭簧9的两个端脚均伸到扭簧槽外,与张开组件42配合。
93.如图7所示,预压检测机构5包括支撑座51、检测气缸52和检测头53。支撑座51安装于底座上,检测气缸52竖直设置安装在支撑座51上并且其活塞杆朝下,检测头53设于检测气缸52活塞杆的端部,检测头53上设有ccd检测仪,ccd检测仪用于检测触头支持板91和扭簧9是否装配完完好,ccd检测仪通过拍摄影像进行检测,检测触头支持是否装配完好,并对装配不合格的产品进行标记,ccd检测仪外购,这是本领域的现有技术,不再赘述。当然,ccd检测仪也可以固定设置在支撑座51的侧面对应位置。另外,也可以采用其它的方式进行检测。此外,检测头53端部上还设有压板,用于下压触头支持板91。
94.如图1和图8所示,触头支持出料机构6包括第二支架61、第二抓取组件62、第二横移组件63、第二升降组件64和出料槽65。第二支架61设于底座上,第二抓取组件62与第二横移组件63相连并用于抓取触头支持并将触头支持放置到出料槽65内,第二横移组件63与第二升降组件64相连并用于带动第二抓取组件62水平移动,第二升降组件64设于第二支架61上并用于带动第二横移组件63上下移动,出料槽65用于接收触头支持并出料。载具11上触头支持装配完成后由传送机构1送入到触头支持出料机构6处,第二横移组件63带动第二升降组件64和第二抓取组件62移动到载具11的上方,第二升降组件64下降带动第二抓取组件62下降到触头支持上方,第二抓取组件62工作并抓取触头支持,而后第二升降组件64带动触头支持上升,第二横移组件63带动触头支持水平移动并移动到出料槽65处,第二出料组件下降并且第二抓取组件62松开,触头支持下落到出料槽65内,完成出料。触头支持出料机
构6采用全自动化的方式进行出料,有效提高了加工的效率。
95.第二抓取组件62与第一抓取组件45结构相同,在此不再赘述。
96.第二升降组件64包括第一升降气缸641、第三滑轨642和第三滑块643。第一升降气缸641竖直设于第二横移组件63上,第三滑轨642共有两组并且竖直设于第一升降气缸641的下部两侧。第三滑块643与第一升降气缸641的活塞杆相连并且第三滑块643与第三滑轨642竖直滑移连接,第三滑块643呈l形,第二抓取组件62设于第三滑块643的底部。第一升降气缸641工作时,带动第三滑块643在第三滑轨642上上下滑动。
97.第二横移组件63包括第一横移气缸631、第四滑轨632和第四滑块643。第一横移气缸631水平设于第二支架61上,第四滑轨632共有两组并且并排水平设于第一横移气缸631的上下侧,第四滑块643与第一横移气缸631的活塞杆相连并且水平滑移连接在第四滑轨632上。第一横移气缸631工作时,带动第四滑块643在第四滑轨632上上下滑动。
98.出料槽65倾斜设置,并且出料槽65较高的一端靠近载具11设置。
99.第二抓取组件62内的气缸、升降气缸和横移气缸上均设有感应器,感应器能够感应各气缸位置,触头支持出料机构6的具体工作流程如下:
100.s1载具11将触头支持送入到第二抓取组件62位置处,第一横移气缸631上的感应器接收到信号,其带动第二升降组件64和第二抓取组件62移动到触头支持的上方。
101.s2第一升降气缸641上的感应器接收到信号,其带动第二抓取组件62下降,并将第二抓取组件62上的两侧卡爪452移动至触头支持的两侧。
102.s3第二抓取组件62内气缸的感应器接收到信号,气缸带动卡爪452对触头支持进行抓取。
103.s4第一升降气缸641上的感应器接收到信号,其带动第二抓取组件62上升。
104.s5第一横移气缸631上的感应器接收到信号,其带动第二升降组件64和第二抓取组件62移动到出料槽65靠近载具11的一端。
105.s6第一升降气缸641上的感应器接收到信号,其带动第二抓取组件62下降,使触头支持位于出料槽65的料道内。
106.s7第二抓取组件62上的卡爪452松开,触头支持下落到出料槽65内,并沿着出料槽65的料道下降,落入到接收设备内。
107.s8第二抓取组件62、第二升降组件64和第二横移组件63依次回到原位。
108.重复s1-s8的步骤,能够将各载具11上的触头支持均抓取到出料槽65内进行出料,高效快捷。
109.如图9所示,出料槽65的底部设有不良品排料机构,不良品排料机构包括排料气缸66和滑板67。排料气缸66和滑板67均与出料槽65同样的斜度设置,排料气缸66与出料槽65的底部相连,滑板67与出料槽65的内壁滑移连接,出料槽65对应滑板67的位置处开设有开口,开口的下方设有不良品盒子。当未出现不合格品时,排料气缸66不工作;当出现不合格品时,排料气缸66的活塞杆收缩,滑板67在出料槽65内滑动,将开口露出,当第二抓取组件62将触头支持放入到出料槽65内时,其会沿着开口掉落,进入到不良品盒子内。良品和不良品分别由不同的盒子进行收纳,有效提高了触头支持分拣的效率。
110.为防止出现余料,余料检测机构7用于将基座内剩余的触头支持取出。如图10所示,余料检测机构7设于传送机构1上,余料检测机构7包括检测组件71和余料出料组件72。
检测组件71用于对基座内的触头支持进行检测,检测基座内是否还剩余有触头支持,余料出料组件72用于对剩余的触头支持进行出料,如果基座内未剩余有触头支持,则余料出料组件72不工作;如果基座内仍然剩余有触头支持,那么余料出料组件72工作。余料检测机构7保证了基座内不会剩余剩余的触头支持,以便基座能够继续进行下一轮触头支持的装配。
111.检测组件71包括第三支架711、第四气缸712、连接板713和检测柱714。第三支架711连接于传送机构1上,第四气缸712竖直设于第三支架711上,第四气缸712的活塞杆与第三支架711相连,第三支架711上设有竖直设置的轨道,第四气缸712滑移连接于轨道上。连接板713与第四气缸712的本体相连,检测柱714共有两组并分别设于相邻基座内第一安装槽111的正上方,检测柱714的底部设有吸盘。将基座传输到此处时,第四气缸712下降,带动连接板713和检测柱714下降,以对第一安装槽111内是否存在触头支持进行检测,如果存在,吸盘将触头支持吸出,第三气缸431带动检测上升到余料出料组件72能够出料的高度。
112.检测组件71的下方设有导向板715,导向板715对应检测柱714的位置处开设有圆形开孔,检测柱714插入到圆形开孔内以防止偏移。
113.如图11所示,余料出料组件72包括第四支架721、余料气缸722、推杆723和推头724。第四支架721连接于传送机构1上,余料气缸722水平设于第四支架721上,推杆723与余料气缸722的活塞杆相连,导向板715对应推杆723的位置处开设有水平设置的导向滑道,推杆723滑移连接于导向滑道内以防止偏移。推头724连接于推杆723远离余料气缸722的一端。当基座内存在触头支持时,余料气缸722的活塞杆推出,带动推杆723在导向滑道内滑动,推杆723将推头724向前推出,推头724的前方设有余料箱,推头724将触头支持从吸盘上推下,并推入到余料箱内。
114.传送机构1、扭簧上料机构2、触头上料机构3、触头支持装配机构4和触头支持出料机构6均是对触头支持内的触头支持板91进行抓取,而扭簧9装配于触头支持板91的下方,如果装配不合格,扭簧9容易留在第一安装槽111内不易取出,因此设置扭簧检测机构8对是否仍存在扭簧9进行检测。
115.如图12所示,扭簧检测机构8包括第五支架81、检测箱82和检测杆83。第五支架81设于传送机构1上,检测箱82与第五支架81相连,检测杆83共有四组并分别设于两个第一安装槽111和两个第二安装槽112的上方,检测杆83的下方设有感应器,当基座移动至感应杆下方时,感应杆内的感应器对第一安装槽111和第二安装槽112内是否仍存在扭簧9进行检测,如果不存在,扭簧检测机构8不发出信号;如果存在,则进行人工清料。该工位用于确保不会出现余料残料,余料出料组件72已经能够保证基本不会有余料残留。在如图6所示,传送机构1包括传送平台和载具11,传送平台为圆环形传送平台,传送平台包括内环12和外环13,内环12包括动力部件和机体,内环12与第一支架41至第五支架81相连并且不发生转动;外环13与载具11相连并进行旋转。载具11至少设有一组并沿着传送平台的顶部边缘处间隔均匀分布。传送机构1、扭簧上料机构2、触头上料机构3、触头支持装配机构4、预压检测机构5、触头支持出料机构6、余料检测机构7和扭簧检测机构8依次沿着传送平台的四周分布。传送机构1先将载具11送入到扭簧上料机构2位置处,扭簧上料机构2将扭簧9装配到第一安装槽111内;装配完成后,传送机构1将载具11送入到触头上料机构3处,触头上料机构3触头支持板91装配到第二安装槽112内;装配完成后,传送机构1将载具11送入到触头支持装配机构4处,触头支持装配机构4将触头支持板91装配到扭簧9上;装配完成后,传送机构1将载具
11送入到预压检测机构5内进行检测,检测是够装配合格,并对不合格的触头支持进行标记;传送机构1将载具11送入到触头支持出料机构6处,触头支持出料机构6分别对合格和不合格的产品进行出料;传送机构1将载具11送入到余料检测机构7处,对是否存在余料进行检测,并将存在的余料送入到余料箱中;传送机构1将载具11送入到扭簧检测机构8处进行检测,对剩余的扭簧9进行检测并标记;传送机构1再将载具11送入到扭簧上料机构2处。如此反复,能够对每个载具11进行触头支持的装配和出料,从而有效提高装配效率。
116.如图13和图14所示,扭簧上料机构2包括第六支架21、第三横移组件22、第三升降组件23和第三抓取组件24。第六支架21设于底座上,第三抓取组件24与第三升降组件23相连并用于抓取扭簧9,第三升降组件23与第三横移组件22相连并用于带动第三抓取组件24上下升降,第三横移组件22设于第六支架21上并用于带动第三升降组件23水平横移。当载具11送到扭簧上料机构2处时,第三横移组件22带动第三升降组件23水平移动到扭簧9上方,第三升降组件23带动第三抓取组件24下降并将扭簧9抓起,而后第三升降组件23带动扭簧9上升到一定高度,第三横移组件22带动扭簧9移动到载具11的上方,第三升降组件23带动扭簧9下降,第三抓取组件24松开扭簧9将扭簧9放入到载具11内,完成安装。通过对扭簧9进行全自动抓取,有效提高了触头支持加工的效率,减少了人力成本。
117.第三抓取组件24包括双向气缸241和抓头242。双向气缸241为一种双杆气缸,双向气缸241连接于第三升降组件23上,抓头242共有两组并分别连接与双向气缸241的两个端部相连,抓头242的上部与双向气缸241的端部相连、下部开设有与扭簧9的内侧壁相贴的半圆柱面2421。对扭簧9进行抓取时,两个抓头242分别插入到扭簧9的内部两侧,而后双向气缸241工作,带动两个抓头242向着相互远离的方向运动,直至抓头242的半圆柱面2421与扭簧9的内壁紧贴,两个抓头242左右分别卡住扭簧9的内部两侧,从而抓紧抓头242,稳定高效。
118.第三升降组件23包括第二升降气缸231、第五滑轨232和第五滑块233。第二升降气缸231竖直设于第二横移组件63上,第五滑轨232共有两组并且竖直设于第二升降气缸231的下部两侧。第五滑块233与第二升降气缸231的活塞杆相连并且第五滑块233与第五滑轨232竖直滑移连接,第五滑块233呈l形,第二抓取组件62设于第五滑块233的底部。第二升降气缸231工作时,带动第五滑块233在第五滑轨232上上下滑动。
119.第三横移组件22包括第二横移气缸221、第六滑轨222和第六滑块223。第二横移气缸221水平设于第六支架21上,第六滑轨222共有两组并且并排水平设于第二横移气缸221的上下侧,第六滑块223与第二横移气缸221的活塞杆相连并且水平滑移连接在第六滑轨222上。第二横移气缸221工作时,带动第六滑块223在第六滑轨222上上下滑动。
120.双向气缸241、第二升降气缸231和第二横移气缸221上均设有感应器,用于感应各气缸的位置,扭簧上料机构2具体的工作流程如下:
121.s1传送机构1将载具11送到第三抓取组件24下方,第二横移气缸221上的感应器接收到信号,其带动升降组件和第二抓取组件62移动到扭簧9的上方。
122.s2升降气缸上的感应器接收到信号,其带动第三抓取组件24下降,并将第三抓取组件24上的两侧抓头242伸入到扭簧9内部。
123.s3双向气缸241的感应器接收到信号,双向气缸241带动抓头242对扭簧9进行抓取。
124.s4第二升降气缸231上的感应器接收到信号,其带动第三抓取组件24上升。
125.s5第二横移气缸221上的感应器接收到信号,其带动第三升降组件23和第三抓取组件24移动到载具11上方。
126.s6第二升降气缸231上的感应器接收到信号,其带动第三抓取组件24下降,将扭簧9送入到第一安装槽111内。
127.s7第三抓取组件24上的抓头242松开,扭簧9落入到第一安装槽111内。
128.s8第三抓取组件24、第三升降组件23和第三横移组件22依次回到原位。
129.重复s1-s8的步骤,能够对抓头242进行自动的抓取,高效快捷。
130.触头上料机构3包括包括第七支架31、第四横移组件32、第四升降组件33和第四抓取组件34。第七支架31设于底座上,第四抓取组件34与第四升降组件33相连并用于抓取触头支持板91,第四升降组件33与第四横移组件32相连并用于带动第四抓取组件34上下升降,第四横移组件32设于第七支架31上并用于带动第四升降组件33水平横移。当载具11送到触头上料机构3处时,第四横移组件32带动第四升降组件33水平移动到触头支持板91上方,第四升降组件33带动第四抓取组件34下降并将触头支持板91抓起,而后第四升降组件33带动触头支持板91上升到一定高度,第四横移组件32带动触头支持板91移动到载具11的上方,第四升降组件33带动触头支持板91下降到第二安装槽112内,第四抓取组件34松开触头支持板91将触头支持板91放入到载具11内,完成安装。通过对触头支持板91进行全自动抓取,有效提高了触头支持加工的效率,减少了人力成本。
131.第四抓取组件34与第一抓取组件45和第二抓取组件62的结构相同,在此不再赘述。
132.第四升降组件33包括第三升降气缸331、第七滑轨332和第七滑块333。第三升降气缸331竖直设于第三横移组件22上,第七滑轨332共有两组并且竖直设于第三升降气缸331的下部两侧。第七滑块333与第三升降气缸331的活塞杆相连并且第七滑块333与第七滑轨332竖直滑移连接,第七滑块333呈l形,第三抓取组件24设于第七滑块333的底部。第三升降气缸331工作时,带动第七滑块333在第七滑轨332上上下滑动。
133.第四横移组件32包括第三横移气缸321、第八滑轨322和第八滑块323。第三横移气缸321水平设于第七支架31上,第八滑轨322共有两组并且并排水平设于第三横移气缸321的上下侧,第八滑块323与第三横移气缸321的活塞杆相连并且水平滑移连接在第八滑轨322上。第三横移气缸321工作时,带动第八滑块323在第八滑轨322上上下滑动。
134.第四抓取组件34内的气缸、第三升降气缸331和第三横移气缸321上均设有感应器,用于感应各气缸的位置,触头上料机构3具体的工作流程如下:
135.s1传送机构1将载具11送到第四抓取组件34下方,第三横移气缸321上的感应器接收到信号,其带动升降组件和第三抓取组件24移动到触头支持板91的上方。
136.s2第三升降气缸331上的感应器接收到信号,其带动第四抓取组件34下降,并将第四抓取组件34上的两侧卡爪452伸入到触头支持板91内部。
137.s3第四抓取组件34内气缸的感应器接收到信号,双向气缸241带动卡爪452对触头支持板91进行抓取。
138.s4第三升降气缸331上的感应器接收到信号,其带动第四抓取组件34上升。
139.s5第三横移气缸321上的感应器接收到信号,其带动第四升降组件33和第四抓取
组件34移动到载具11上方。
140.s6第三升降气缸331上的感应器接收到信号,其带动第四抓取组件34下降,将触头支持板91送入到第二安装槽112内。
141.s7第四抓取组件34上的卡爪452松开,触头支持板91落入到第二安装槽112内。
142.s8第四抓取组件34、第四升降组件33和第四横移组件32依次回到原位。
143.重复s1-s8的步骤,能够对触头支持板91进行自动的抓取,高效快捷。
144.扭簧上料机构2和触头上料机构3均设置有振动盘进行上料,由于载具11上能够分别装载两组触头支持板91和扭簧9,因此与扭簧上料机构2和触头上料机构3相连的振动盘能够分别输送两组扭簧9和两组触头支持板91。
145.与扭簧上料机构2相连的振动盘为第一振动盘25,第一振动盘25共有两组并且相互对称设置,与触头上料机构3相连的振动盘为第二振动盘35,第二振动盘35为双料道振动盘,双料道振动盘能够同时输送两组触头支持板91。
146.第一抓取组件45、第二抓取组件62、第三抓取组件24和第四抓取组件34均有两组,能够同时抓取两组触头支持或触头支持的零部件。
147.触头支持的装配流程如下:
148.(1)扭簧9由第一振动盘25送出,并由扭簧9装配机构抓起并装配到载具11的外侧。
149.(2)扭簧9由传送机构1送入触头支持板91装配机构处,触头支持板91由第二振动盘35送出,由触头支持板91装配就抓起并装配到载具11的内侧。
150.(3)触头支持板91和扭簧9由载具11送到触头支持装配机构4处,触头支持装配机构4将触头支持板91装配到扭簧9上。
151.(4)触头支持板91和扭簧9由传送机构1送入到触头支持装配机构4内进行装配,装配成触头支持。
152.(5)触头支持由传送机构1送入到预压检测机构5内进行检测装配完成度。
153.(6)触头支持由传送机构1送入到触头支持出料机构6处,触头支持出料机构6将合格产品移动到出料位,不合格品送入到不良品盒子。
154.(7)对于未能由触头支持出料机构6送出的触头支持,由传送机构1送入到余料检测机构7中进行送出。
155.本发明创造还提供了一种触头支持装配方法,包括所述的触头支持组装机和如下步骤:
156.s2:扭簧上料机构2工作并将扭簧9抓取到载具11的外侧;
157.s3:传送机构1工作并将载具11传送到触头上料机构3处;
158.s5:触头上料机构3工作并将触头支持板91抓取到载具11的内侧;
159.s6:传送机构1工作并将载具11送到触头支持装配机构4处;
160.s7:触头支持装配机构4将触头支持板91装配到扭簧9上,形成触头支持;
161.s10:传送机构1将载具11传送到触头支持出料机构6处;
162.s11:触头支持出料机构6对触头支持进行出料,将合格的产品移至出料位,将检测不合格的产品移至不良品盒子;
163.s16:传送机构1将载具11传送至扭簧上料机构2处。
164.为了防止出现不合格品,触头支持装配方法还包括如下步骤:
165.s8:传送机构1将载具11送到预压检测机构5处;
166.s9:预压检测机构5对触头支持的装配完成度进行检测;
167.为了防止载具11上仍存在余料,触头支持装配方法还包括如下步骤:
168.s12:传送机构1将载具11传送到余料检测机构7;
169.s13:余料检测竞购对载具11上的触头支持进行检测,如果仍存在触头支持,将触头支持移至余料盒子;
170.为了防止载具11上仍存在扭簧9,触头支持装配方法还包括如下步骤:
171.s14:传送机构1将载具11传送到扭簧检测机构8;
172.s15:扭簧检测机构8对载具11上是否仍存在扭簧9进行检测,如果存在扭簧9则进行标记。
173.为了提高上料的效率,触头支持装配方法还包括如下步骤:
174.s1:第一振动盘25将扭簧9送到扭簧上料机构2处;
175.s4:第二振动盘35将触头支持板91送到触头上料机构3处。
176.需要说明的是,本发明的载具11设有容纳扭簧9和装配后的触头支持的第一安装槽111,以及容纳触头支持板91的第二安装槽112,用于扭簧9和触头支持板91的上料,便于分步装配提高效率,当然也可以不设置第二安装槽112,触头支持板91上料后,与张开组件42配合直接装配触头支持板91。
177.所述触头支持装配机构4通过第一横移组件43和第一升降组件44驱动第一抓取组件45来装配触头支持板91,第一升降组件44安装在第一横移组件43上,当然也可以第一横移组件43安装在第一升降组件44上也是相同的。此外显然触头支持装配机构4采用其它的能驱动第一抓取组件45移动的移动机构也是可以的,均属于本发明的保护范围。
178.以上内容是结合具体的优选实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。