技术特征:
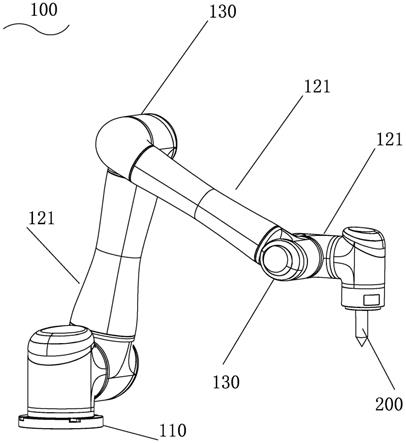
1.一种工业机器人系统,包括:工业机器人和安全控制系统,所述工业机器人包括:底座;机械臂,包括若干个机械臂部分,所述机械臂一端连接于底座,另一端用于连接工具;关节,用于连接相邻的俩机械臂部分;所述安全控制系统用于控制所述工业机器人安全运行,其特征在于,所述安全控制系统包括:获取模块,用于获取所述机器人的当前位置,以及机器人位姿边界信息;计算模块,用于计算所述当前位置到所述位姿边界的安全距离,并基于所述安全距离计算机器人在该安全距离内制动所需的必要制动扭矩和/或制动力;控制模块,用于判断机器人当前位置可提供的最大制动扭矩和/或制动力是否大于所述必要制动扭矩和/或制动力,判断机器人当前可提供的最大制动扭矩和/或制动力的估计制动距离是否小于所述安全距离,以及当以上两组判断至少其一不能满足时,控制所述机器人减速或停机。2.根据权利要求1所述的工业机器人系统,其特征在于,所述位姿边界包括肘部位置边界、关节角度边界、机器人工具位姿边界、机器人工具方向边界。3.根据权利要求1所述的工业机器人系统,其特征在于,所述获取模块用于从人机交互设备获取所述位姿边界信息。4.根据权利要求3所述的工业机器人系统,其特征在于,所述工业机器人系统包括人机交互设备,所述人机交互设备包括机器人示教器。5.根据权利要求1所述的工业机器人系统,其特征在于,所述计算模块用于根据所述当前位置动态的计算所述安全距离,并基于所述安全距离动态的计算所述必要制动扭矩和/或制动力。6.根据权利要求1所述的工业机器人系统,其特征在于,所述控制模块包括第一控制模块和第二控制模块,所述第一控制模块和第二控制模块独立工作,所述第一控制模块用于判断机器人当前位置可提供的最大制动扭矩和/或制动力是否大于所述必要制动扭矩和/或制动力,所述第二控制模块用于判断机器人当前可提供的最大制动扭矩和/或制动力的估计制动距离是否小于所述安全距离。7.根据权利要求6所述的工业机器人系统,其特征在于,所述第一控制模块判断不能满足条件时,控制所述机器人减速或停机,或,所述第二控制模块判断不能满足条件时,控制所述机器人减速或停机。8.一种工业机器人系统的安全控制方法,其特征在于,所述工业机器人系统包括工业机器人和安全控制系统,所述工业机器人包括:底座;机械臂,包括若干个机械臂部分,所述机械臂一端连接于底座,另一端用于连接工具;关节,用于连接相邻的俩机械臂部分;所述安全控制系统用于控制所述工业机器人安全运行;所述安全控制方法包括:获取所述机器人的当前位置以及机器人位姿边界信息;计算所述当前位置到所述位姿边界的安全距离,并基于所述安全距离计算机器人在该安全距离内制动所需的必要制动扭矩和/或制动力;判断机器人当前位置可提供的最大制动扭矩和/或制动力是否大于所述必要制动扭矩和/或制动力,判断机器人当前可提供的最大制动扭矩和/或制动力的估计制动距离是否小
于所述安全距离,以及当以上两组判断至少其一不能满足时,控制所述工业机器人减速或停机。9.根据权利要求8所述的安全控制方法,其特征在于,所述位姿边界包括肘部位置边界、关节角度边界、机器人工具位姿边界、机器人工具方向边界。位姿边界。10.根据权利要求8所述的安全控制方法,其特征在于,判断机器人当前位置可提供的最大制动扭矩和/或制动力是否大于所述必要制动扭矩和/或制动力,以及判断机器人当前可提供的最大制动扭矩和/或制动力的估计制动距离是否小于所述安全距离,该两判断独立进行且各自能够基于判断结果控制所述工业机器人减速或停机。
技术总结
本发明涉及一种确保机器人位姿边界限制的安全系统,包括:工业机器人和安全控制系统,安全控制系统包括:获取模块,用于获取所述机器人的当前位置以及机器人位姿边界信息;计算模块,用于计算所述当前位置到所述位姿边界的安全距离,并基于所述安全距离计算机器人在该安全距离内制动的必要制动扭矩/制动力;控制模块,用于判断机器人当前位置可提供的最大制动扭矩/制动力是否大于所述必要制动扭矩/制动力,判断机器人当前可提供的最大制动扭矩和/或制动力的估计制动距离是否小于所述安全距离,上述判断至少任一不满足时,控制所述机器人减速或停机。本发明的有益效果是:工业机器人系统的安全性判断可靠性高。器人系统的安全性判断可靠性高。器人系统的安全性判断可靠性高。
技术研发人员:孙恺
受保护的技术使用者:苏州艾利特机器人有限公司
技术研发日:2020.08.14
技术公布日:2022/2/23
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。