1.本发明提供一种轻量化、可微调承载具的摆置位置或角度,进而提高作业品质的载具机构。
背景技术:
2.在现今,作业装置(如输送装置或测试装置)以载具机构带动作业件(如压移件或载台)对电子元件执行预设作业(如压移作业或输送作业);例如输送装置以一为载台的作业件承置及载送电子元件,例如测试装置以一为压移件的作业件移载且压接电子元件;然不论是何种装置,在电子元件日益轻薄且体积精小的趋势下,对于作业件的作业精准度要求相当高。以测试装置为例,其载具机构的压移件以吸嘴吸附电子元件,再作y-z方向位移将电子元件移入测试座,由于电子元件的复数个微小接点必须精准对位测试座的复数个探针,方可使电子元件于测试座准确执行测试作业,一旦压移件将电子元件移入测试座的精准度稍有偏差,电子元件的接点即无法确实接触测试座的探针,以致影响测试品质;因此,载具机构除了利用压移件将电子元件移入测试座外,也必须使压移件可带动电子元件作x方向、y方向或θ水平旋转角度的自由度位移调整着实重要。
技术实现要素:
3.本发明的目的在于:提供一种载具机构及其应用的作业设备,解决现有技术中存在的上述技术问题。
4.为实现上述目的,本发明采用的技术方案是:
5.一种载具机构,其特征在于,包含:
6.承载单元:设有第一承载具及第二承载具,该第一承载具设有至少一第一装配部,该第二承载具设有至少一第一凹槽;
7.驱动单元:设有至少一第一驱动器,该第一驱动器装配于该第一承载具的该第一装配部,并设有第一传动件配置于该第二承载具的该第一凹槽,以将该第一传动件的旋转运动转为带动该第二承载具作至少一自由度的调整。
8.所述的载具机构,其中,该承载单元设有该第一承载具、该第二承载具及第三承载具,该第一承载具设有该第一装配部及第二装配部,该第三承载具设有至少一第二凹槽,该驱动单元设有该第一驱动器及第二驱动器,该第二驱动器以第二传动件配置于该第三承载具的该第二凹槽。
9.所述的载具机构,其中,该承载单元设有该第一承载具、该第二承载具、该第三承载具及第四承载具,其该第一承载具设有第三凹槽,该第四承载具设有第三装配部,该驱动单元设有该第一驱动器、该第二驱动器及第三驱动器,其该第三驱动器以第三传动件配置于该第一承载具的该第三凹槽。
10.所述的载具机构,其中,该承载单元的该第一承载具设有该第一装配部及第二装配部,该第二承载具设有该第一凹槽及第二凹槽,该驱动单元设有该第一驱动器及第二驱
动器,其该第二驱动器以第二传动件配置于该第二承载具的该第二凹槽。
11.所述的载具机构,其中,还包含于该第一承载具及该第二承载具间设置至少一第一中介片,该第二承载具设有第一顶抵块,以供顶抵于该第一承载具。
12.所述的载具机构,其中,还包含于该第一承载具及该第一中介片间设置至少一第一保持器。
13.所述的载具机构,其中,还包含于该第一承载具及该第二承载具间设置至少一第一中介片,以及于该第二承载具及该第三承载具间设置至少一第二中介片,该第二承载具设有第一顶抵块,以供顶抵于该第一承载具,以及于该第三承载具设有第二顶抵块,而供顶抵于该第二承载具。
14.所述的载具机构,其中,还包含于该第一承载具及该第一中介片间设置至少一第一保持器,以及于该第二承载具及该第二中介片间设置至少一第二保持器。
15.所述的载具机构,其中:该第一驱动器的该第一传动件为偏心凸轮。
16.一种作业设备,其特征在于,包含:
17.机台;
18.供料装置:配置于该机台,并设有至少一容纳待作业电子元件的供料承置器;
19.收料装置:配置于该机台,并设有至少一容纳已作业电子元件的收料承置器;
20.作业装置:配置于该机台,并设有至少一作业件及至少一所述的载具机构,该作业件装配于该载具机构,以供对电子元件执行预设作业;
21.中央控制装置:以供控制及整合各装置作动。
22.本发明的优点一,提供一种载具机构,包含承载单元及驱动单元,承载单元设有第一承载具及第二承载具,第一承载具设有装配部,第二承载具设有凹槽,驱动单元设有驱动器,驱动器装配于第一承载具的装配部,并以传动件可旋转地配置于第二承载具的凹槽,以将传动件于凹槽内的旋转运动转为带动第二承载具作线性方向位移或水平角度旋转的自由度调整,进而精确微调第二承载具的摆置位置或角度。
23.本发明的优点二,提供一种载具机构,其承载单元包含第一、二、三承载具,第一承载具设有复数个装配部,第二、三承载具设有呈不同方向配置的凹槽,驱动单元设有复数个驱动器,以装配于第一承载具的复数个装配部,复数个驱动器的复数个传动件分别可旋转地配置于第二、三承载具的凹槽,以将各传动件于相对应的凹槽内的旋转运动转为带动第二、三承载具作二个不同线性方向位移的复数个自由度调整,进而精确微调第三承载具的摆置位置,以提高使用效能。
24.本发明的优点三,提供一种载具机构,其承载单元包含第一、二、三、四承载具,第一承载具设有复数个装配部及一凹槽,第二、三承载具设有呈不同方向配置的凹槽,第四承载具设有一装配部,驱动单元的复数个驱动器分别装配于第一、四承载具的复数个装配部,并以复数个传动件可旋转地配置于第一、二、三承载具的复数个凹槽,以将各传动件于相对应的凹槽内的旋转运动转为带动第一、二、三承载具作二个不同线性方向位移及水平角度旋转的复数个自由度调整,进而精确微调第三承载具的摆置位置及角度,进而提高使用效能。
25.本发明的优点四,提供一种载具机构,其承载单元的第一承载具设有复数个装配部,第二承载具设有复数个呈不同方向配置的凹槽,驱动单元的复数个驱动器装配于第一
承载具的复数个装配部,并以复数个传动件可旋转地配置于第二承载具的复数个凹槽,以将各传动件于相对应的凹槽内的旋转运动转为带动第二承载具作二个不同线性方向位移的复数个自由度调整,进而精确微调第二承载具的摆置位置,以提高使用效能。
26.本发明的优点五,提供一种载具机构,其承载单元于第一、二承载具间配置至少一中介片,以于第二承载具承受作用力而压缩中介片,使第二承载具依受力方向而贴接且传导作用力至第一承载具,以避免第二承载具上的保持器受力过当而损害,进而延长保持器的使用寿命及节省成本。
27.本发明的优点六,提供一种作业设备,包含机台、供料装置、收料装置、具本发明载具机构的作业装置及中央控制装置;供料装置配置于机台,并设有至少一容纳待作业电子元件的供料承置器;收料装置配置于机台,并设有至少一容纳已作业电子元件的收料承置器;作业装置配置于机台,并设有至少一作业件及本发明载具机构,作业件装配于载具机构,以供对电子元件执行预设作业;中央控制装置以供控制及整合各装置作动,而执行自动化作业,达到提升作业效能的实用效益。
附图说明
28.图1是本发明载具机构的外观图。
29.图2是本发明载具机构的零件分解图。
30.图3是本发明载具机构的组装剖视图。
31.图4是第一承载具与第一驱动器及第一传动件的组装示意图。
32.图5是第二承载具与第二驱动器及第二传动件的组装剖视图。
33.图6是第三承载具与第三驱动器及第三传动件的组装示意图。
34.图7是本发明载具机构的使用示意图(一)。
35.图8是本发明载具机构的使用示意图(二)。
36.图9是本发明载具机构的使用示意图(三)。
37.图10是本发明载具机构装配吸嘴的使用示意图。
38.图11是本发明载具机构装配载台的使用示意图。
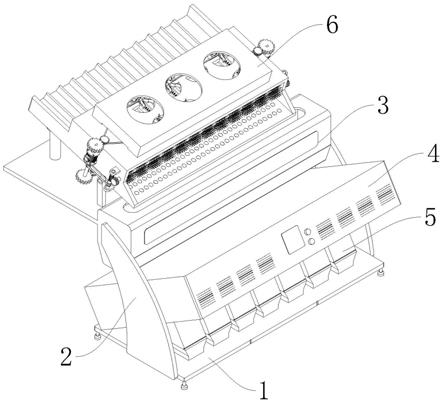
39.图12是本发明载具机构应用于作业设备的示意图。
40.附图标记说明:第一承载具 11;第一板体 111;第一凸部 1111;第二凸部 1112;承座 112;第一装配部 113;第二装配部 114;第三凹槽 115;第一轴线 l1;第二轴线 l2;第二承载具 12;第二板体 121;第一顶抵块 122;第一让位部 123;第一凹槽 124;第三承载具 13;第三板体 131;第二顶抵块 132;组装部 133;第二凹槽 134;第四承载具 14;穿孔 141;第三装配部 142;第一中介片 15;第二让位部 151;第三让位部 152;第二中介片 16;第四让位部 161;第五让位部 162;第一滑轨 171;第一滑块 172;第二滑轨 181;第二滑块 182;第一驱动器 21;第一转轴 211;第一偏心凸轮 212;第二驱动器 22;第二转轴 221;第二偏心凸轮 222;第三驱动器 23;第三转轴 231;第三偏心凸轮 232;吸嘴 31;载台 32;机台 40;供料装置 50;供料承置器 51;收料装置 60;收料承置器 61;作业装置 70;电路板 71;测试座 72;搬运器 73;压移件 74;输送装置 80;第一输送器 81;入料载台 82;出料载台 83;第二输送器 84。
具体实施方式
41.为使对本发明作更进一步的了解,兹举一较佳实施例并配合图式,详述如后:
42.请参阅图1~图6,本发明载具机构包含承载单元及驱动单元,更包含至少一中介片及至少一保持器。
43.承载单元包含第一承载具11及第二承载具12,第一承载具11设有至少一第一装配部,第二承载具12设有至少一第一凹槽,承载单元可依作业需求而增减承载具数量、装配部数量及凹槽数量。
44.如上述,在某一实施例,承载单元包含第一、二承载具,第一承载具设有第一装配部,第二承载具设有呈单一线性方向(如x方向)配置的第一凹槽,驱动单元设有第一驱动器,以装配于第一承载具的第一装配部,第一驱动器的第一传动件可旋转地配置于第二承载具的第一凹槽,以将第一传动件于第一凹槽内的旋转运动转为带动第二承载具作单一线性方向(x方向)位移或水平角度旋转(如θ角度)的自由度调整,进而精确微调第二承载具的摆置位置或角度。
45.如上述,在某一实施例,承载单元包含第一、二、三承载具,第一承载具设有第一、二装配部,第二、三承载具设有呈不同方向配置的第一、二凹槽,驱动单元设有第一、二驱动器,以装配于第一承载具的第一、二装配部,第一、二驱动器的第一、二传动件分别可旋转地配置于第二、三承载具的第一、二凹槽,以将第一、二传动件于相对应的第一、二凹槽内的旋转运动转为带动第二、三承载具作二个不同线性方向(x-y方向)位移的复数个自由度调整,进而精确微调第三承载具的摆置位置。
46.如上述,在某一实施例,承载单元包含第一、二、三、四承载具,第一承载具设有第一、二装配部及第三凹槽,第二、三承载具设有呈不同方向(如x-y方向)配置的第一、二凹槽,第四承载具设有第三装配部,驱动单元的第一、二、三驱动器分别装配于第一、四承载具的第一、二、三装配部,并以第一、二、三传动件可旋转地配置于第一、二、三承载具的第一、二、三凹槽,以将第一、二、三传动件于相对应的第一、二、三凹槽内的旋转运动转为带动第一、二、三承载具作二个不同线性方向(x-y方向)位移及水平角度旋转(如θ角度)的复数个自由度调整,进而精确微调第三承载具的摆置位置及角度。
47.如上述,在某一实施例,承载单元的第一承载具设有第一、二装配部,第二承载具设有呈不同线性方向(如x-y方向)配置的第一、二凹槽,驱动单元的第一、二驱动器装配于第一承载具的第一、二装配部,并以第一、二传动件可旋转地配置于第二承载具的第一、二凹槽,以将第一、二传动件于相对应的第一、二凹槽内的旋转运动转为带动第二承载具作二个不同线性方向(x-y方向)位移的复数个自由度调整,进而精确微调第二承载具的摆置位置。
48.于本实施例,承载单元包含第一承载具11、第二承载具12、第三承载具13及第四承载具14。第一承载具11设有至少一第一装配部,更进一步,第一承载具11可为台座、架体或板体,并依作业需求,可作固定式或活动式配置;例如第一承载具11可为固定式的机架,以于固定位置供第二承载具12调整摆置位置或角度;例如第一承载具11可为活动式的移动座板,以移载第二承载具12至预设位置,而供调整摆置位置或角度。
49.于本实施例,第一承载具11于第一板体111设有呈z方向向上延伸的承座112,承座112设有第一装配部113及第二装配部114,第一装配部113及第二装配部114可为相同或不
同深度尺寸的容置孔,容置孔可为直孔或阶级孔;于本实施例,承座112沿第一装配部113的第一轴线l1于第一板体111下方延伸设有第一凸部1111,以及沿第二装配部114的第二轴线l2于第一板体111下方延伸设有第二凸部1112,第二凸部1112的长度大于第一凸部1111,第一承载具11沿第一轴线l1设有贯通承座112及第一凸部1111且为阶级孔的第一装配部113,以及沿第二轴线l2设有贯通承座112及第二凸部1112且为阶级孔的第二装配部114,第二装配部114的孔深尺寸大于第一装配部113的孔深尺寸,另第一承载具11于第一板体111设有一呈x方向配置的第三凹槽115,然第三凹槽115也可开设呈y方向,仅是改变第一承载具11的水平旋转方向。
50.第二承载具12设有至少一第一凹槽,第一凹槽相对于第一承载具11的第一装配部113;于本实施例,第二承载具12装配于第一承载具11的下方,第二承载具12的第二板体121顶面凸设有第一顶抵块122,第一顶抵块122与第一承载具11的第一板体111间具有微小间距,由于第一承载具11向下延伸有长度较长的第二凸部1112,第二板体121于相对应第二凸部1112的位置开设有为镂空孔的第一让位部123,以供穿置第二凸部1112;另第二承载具12于第二板体121相对应第一装配部113的位置设有一呈y方向配置且镂空的第一凹槽124,然第一凹槽124也可开设呈x方向,仅是改变第二承载具12的线性位移方向。
51.第三承载具13装配于第二承载具12的下方,第三承载具13于第三板体131相对应第二承载具12的一面凸设有第二顶抵块132,第二顶抵块132与第二承载具12的第二板体121间具有微小间距,第三板体131的另一面则为组装部133,以供组装至少一作业件;另第三承载具13于第三板体131相对应第二装配部114的位置设有一呈x方向配置且镂空的第二凹槽134,然第二凹槽134也可开设呈y方向,仅是改变第三承载具13的线性位移方向。
52.第四承载具14以供装配第一承载具11,第四承载具14可为机架或移动架,而作固定式或活动式配置;于本实施例,第四承载具14为移动架,而可作至少一方向位移,第四承载具14设有穿孔141,以供穿置第一承载具11的承座112,并于相对应第一承载具11的第三凹槽115位置设有第三装配部142。
53.承载单元于第一、二承载具11、12间配置至少一中介片,以于第二承载具12承受作用力而压缩中介片,使第二承载具12依受力方向而贴接且将作用力传导至第一承载具11,以避免第二承载具12上的保持器受力过当而损害,进而延长保持器的使用寿命及节省成本;于本实施例,第二承载具12的第二板体121上配置至少一第一中介片15,第一中介片15为可压缩材质,并于相对应第一凸部1111及第二凸部1112的位置开设一较大尺寸且为镂空孔的第二让位部151,以供穿置第二凸部1112,第一中介片15于相对应第一顶抵块122的位置设有为缺槽的第三让位部152,以供穿置第一顶抵块122。
54.第三承载具13与第二承载具12间配置至少一第二中介片16,第二中介片16为可压缩材质,并于相对应第二凸部1112的位置开设一较大尺寸且为镂空孔的第四让位部161,第二中介片16于相对应第二顶抵块132的位置设有为缺槽的第五让位部162,以供穿置第二顶抵块132。
55.承载单元于第一、二承载具11、12间配置至少一第一保持器,以使第二承载具12相对第一承载具11作线性位移或水平旋转角度;更进一步,第一保持器可位于第一承载具11与第一中介片15之间,第一保持器可为线性保持器(如滑轨组)或水平保持器;于本实施例,第一承载具11与第一中介片15间设有一为第一滑轨组的第一保持器,第一滑轨组呈x方向
配置,其第一滑轨171装配于第一承载具11的第一板体111底面,并以第一滑块172装配于第一中介片15,使第一中介片15及第二承载具12作x方向线性位移。
56.第二、三承载具12、13间配置至少一第二保持器,以使第三承载具13相对第二承载具12作线性位移或水平旋转角度;更进一步,第二保持器可位于第二承载具12与第二中介片16之间,第二保持器可为线性保持器(如滑轨组)或水平保持器;于本实施例,第二承载具12与第二中介片16间设有一为第二滑轨组的第二保持器,第二滑轨组呈y方向配置,其第二滑轨181装配于第二承载具12的第二板体121底面,并以第二滑块182装配于第二中介片16,使第二中介片16及第三承载具13作y方向线性位移。
57.驱动单元设有至少一第一驱动器,第一驱动器装配于第一承载具11的第一装配部,并以第一传动件可旋转地配置于第二承载具12的第一凹槽,以将第一传动件的旋转运动转为带动第二承载具12作线性位移或水平角度旋转,使第二承载具作至少一自由度的摆置位置或角度的调整;更进一步,第一驱动器为压电元件、马达或包含马达及谐波减速机,不受限于本实施例。再者,驱动单元可依作业需求而增减驱动器数量及传动件数量。
58.于本实施例,驱动单元包含第一驱动器21、第二驱动器22及第三驱动器23,第一驱动器21装配于第一承载具11的第一装配部113,并以第一转轴211穿伸出第一承载具11的第一凸部1111,第一转轴211装配第一传动件,第一传动件为第一偏心凸轮212,第一偏心凸轮212可旋转地置入于第二承载具12的第一凹槽124,利用第一偏心凸轮212的旋转运动转为带动第二承载具12作x方向线性位移的自由度调整;第二驱动器22装配于第一承载具11的第二装配部114,并以第二转轴221穿伸出第一承载具11的第二凸部1112,第二转轴221装配第二传动件,第二传动件为第二偏心凸轮222,第二偏心凸轮222可旋转地置入于第三承载具13的第二凹槽134,利用第二偏心凸轮222的旋转运动转为带动第三承载具13作y方向线性位移的自由度调整;第三驱动器23装配于第四承载具14的第三装配部142,并以第三转轴231穿伸出第四承载具14,第三转轴231装配第三传动件,第三传动件为第三偏心凸轮232,第三偏心凸轮232可旋转地置入于第一承载具11的第三凹槽115,利用第三偏心凸轮232的旋转运动转为带动第一承载具11作水平角度旋转(如θ角度)的自由度调整。
59.请参阅图2、图3、图7,欲微调第三承载具13的x方向摆置位置时,驱动单元以第一驱动器21的第一转轴211驱动第一偏心凸轮212旋转运动,第一偏心凸轮212以第一转轴211的中心轴线为旋转中心,而于第二承载具12的第一凹槽124作旋转运动,并将旋转运动转为线性位移,以顶推第二承载具12沿x方向位移,第二承载具12不仅利用第一滑块172沿第一滑轨171辅助作x方向线性位移,由于第三承载具13以第二滑轨组及第二中介片16连结装配于第二承载具12的下方,使得第二承载具12带动第三承载具13作x方向线性位移的自由度调整,进而微调第三承载具13的x方向摆置位置。
60.请参阅图2、图3、图8,欲微调第三承载具13的y方向摆置位置时,驱动单元以第二驱动器22的第二转轴221驱动第二偏心凸轮222旋转运动,第二偏心凸轮222以第二转轴221的中心轴线为旋转中心,而于第三承载具13的第二凹槽134作旋转运动,并将旋转运动转为线性位移,以顶推第三承载具13作y方向位移的自由度调整,第三承载具13利用第二滑块182沿第二滑轨181辅助作y方向线性位移,进而使第三承载具13微调y方向摆置位置。
61.然,当第三承载具13承受外部作用力时,由于第三承载具13与第二承载具12间配置有可被压缩的第二中介片16,以及第二承载具12与第一承载具11间配置有可被压缩的第
一中介片15,使得第三承载具13可沿受力方向压缩第二中介片16,令第二顶抵块132贴接于第二承载具12的第二板体121,以将作用力传导至第二承载具12,以避免过当的作用力施加于第二滑轨181、第二滑块182及二者间的滚珠等,进而提高使用寿命;又第二承载具12承受作用力时,再压缩第一中介片15,令第一顶抵块122贴接于第一承载具11的第一板体111,以将作用力传导至第一承载具11,以避免过当的作用力施加于第一滑轨171、第一滑块172及二者间的滚珠等,进而提高使用寿命。
62.请参阅图2、图3、图9,欲微调第三承载具13的水平角度(如θ角度)时,驱动单元以第三驱动器23的第三转轴231驱动第三偏心凸轮232旋转运动,第三偏心凸轮232以第三转轴231的中心轴线为旋转中心,而于第一承载具11的第三凹槽115作旋转运动,并将旋转运动转为水平角度旋转,以顶推第一承载具11作θ角度水平角度旋转,由于第二承载具12以第一滑轨组及第一中介片15连结装配于第一承载具11的下方,使得第一承载具11带动第二承载具12及第三承载具13同步作θ角度水平角度旋转的自由度调整,进而微调第三承载具13的摆置角度。
63.请参阅图2、图3、图10、图11,载具机构可应用于作业设备,并依作业需求,而于移载单元的第三承载具13装配至少一作业件,作业件可为吸嘴、下压治具、压移件、载台或预温盘等,不受限于本实施例,载具机构可微调作业件的摆置位置或角度;以图10为例,载具机构于第三承载具13的组装部133装配一为吸嘴31的作业件,以使吸嘴31作x-y方向位移及θ角度水平角度旋转的复数个自由度调整,使吸嘴31吸附的电子元件(图未示出)的接点精确对位测试座(图未示出)的探针,进而提高作业品质。再者,以图11为例,载具机构可整组向上翻转,令第三承载具13的组装部133朝向上方,以供装配一为载台32的作业件,以使载台32作x-y方向位移及θ角度水平角度旋转的复数个自由度调整,以供另一为吸嘴的作业件(图未示出)准确取放电子元件。
64.请参阅图1~图6、图12,本发明应用于电子元件作业设备,作业设备包含机台40、供料装置50、收料装置60、具本发明载具机构的作业装置70及中央控制装置(图未示出),更包含输送装置80;供料装置50装配于机台40,并设有至少一供料承置器51,以容纳至少一待作业的电子元件;收料装置60装配于机台30,并设有至少一收料承置器61,以容纳至少一已作业的电子元件;作业装置70装配于机台30,并包含至少一作业件及本发明载具机构,作业件装配于载具机构,以供对电子元件执行预设作业(如压移作业或载送作业等);于本实施例,作业装置70为测试装置,更包含一为测试器的承置器,以供承置及测试电子元件,测试器包含电性连接的电路板71及具探针的测试座72,测试座72以供测试电子元件,本发明载具机构的第四承载具14装配于搬运器73,搬运器73带动整组载具机构作y-z方向位移,载具机构的第三承载具13则供装配为压移件74的作业件,以供执行移载及压接电子元件的作业;输送装置80装配于机台40,并设有至少一输送器,以输送电子元件,于本实施例,输送装置80设有第一输送器81,以于供料装置50的供料承置器51取出待测的电子元件,并移载至入料载台82,入料载台82将待测的电子元件载送至作业装置70的侧方,作业装置70以搬运器73驱动本发明载具机构及压移件74作y-z方向位移,令压移件74于入料载台82取出待测的电子元件,并以本发明载具机构微调压移件74的摆置位移及角度,使压移件74将电子元件移入测试座72,并令电子元件的接点精准对位测试座72的探针而执行测试作业,以及搬运器73驱动压移件74将已测电子元件移载至出料载台83,出料载台83载出已测的电子元
件,输送装置80的第二输送器84于出料载台83取出已测的电子元件,并依据测试结果,将已测的电子元件输送至收料装置60的收料承置器61处而分类收置;中央控制装置系用以控制及整合各装置作动,以执行自动化作业,达到提升作业效能的实用效益。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。