技术特征:
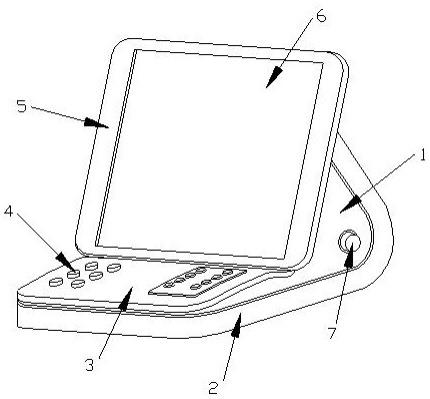
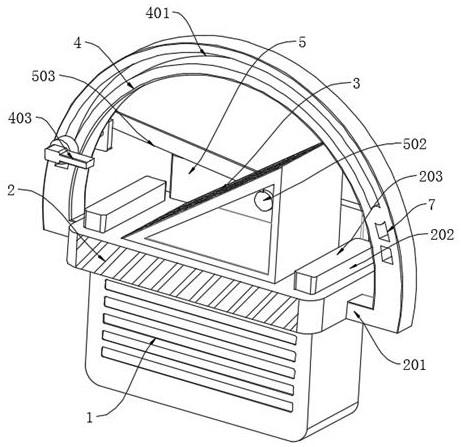
1.一种矿山系统智能学习协同作业装置,其结构设有控台(1)、承托装置(2)、面板(3)、操控钮(4)、掀盖板(5)、显示器(6)、旋钮(7),所述承托装置(2)固定连接于控台(1)底端,所述面板(3)位于控台(1)上方,所述操控钮(4)与面板(3)为一体化结构且位于其顶面位置处,所述显示器(6)与掀盖板(5)为一体化结构,所述掀盖板(5)活动在面板(3)上方,所述旋钮(7)固定安置在控台(1)侧端,所述显示器(6)通过面板(3)与控台(1)相配合,其特征在于:所述承托装置(2)设有板架(21)、防滑装置(22)、内槽(23)、斜撑架(24)、摩擦块(25),所述板架(21)外侧端固定连接于控台(1)底部,所述防滑装置(22)位于内槽(23)下方,所述斜撑架(24)固定位于板架(21)中上区段的斜向位置处,所述摩擦块(25)与斜撑架(24)为一体化结构其设在其外侧端面上。2.根据权利要求1所述的一种矿山系统智能学习协同作业装置,其特征在于:所述防滑装置(22)设有横架(221)、竖板(222)、防滑块(223)、纹径(224)、弧架(225)、清理球(226),所述横架(221)位于内槽(23)内侧下方,所述竖板(222)顶部嵌入连接在内槽(23)内侧顶边,所述竖板(222)垂直连接在横架(221)上方,所述防滑块(223)连接在横架(221)底部,所述纹径(224)位于防滑块(223)之间的间距处,所述弧架(225)贯穿过竖板(222)中,所述弧架(225)两侧端与清理球(226)顶端铰接连接,所述清理球(226)间隙连接于防滑块(223)侧端。3.根据权利要求2所述的一种矿山系统智能学习协同作业装置,其特征在于:所述清理球(226)设有韧块(a1)、偏重球(a2)、弹簧(a3),所述韧块(a1)与弧架(225)侧端铰接连接,所述韧块(a1)间隙连接于防滑块(223)侧端且活动配合,所述偏重球(a2)活动于韧块(a1)内侧方,所述弹簧(a3)分别与韧块(a1)内侧边和偏重球(a2)外周端相连接且活动配合。
技术总结
本实用新型公开了一种矿山系统智能学习协同作业装置,其结构设有控台、承托装置、面板、操控钮、掀盖板、显示器、旋钮,由手臂肌肤与防滑块相触压而能有较好的防滑效果,防滑块自身的韧性性质使其能被人员左右拨动,令间隙连接在其旁侧的清理球受动而驱使弧架发生弹性伸缩,其弧状结构令其伸缩的同时贯穿着竖板进行位置变动,更好的带动清理球翻转,偏重球随整体受动而在其自身重量的配合下,在韧块内侧方活动,由弹簧的弹性配合其在韧块内侧方不断发生位置变化,进一步增加清理球的活动力,从而能将纹径上填塞的颗粒灰尘杂质向外顶出,及时做纹路的清理作业,确保防滑装置底部与人员手臂触接时的防滑效果。手臂触接时的防滑效果。手臂触接时的防滑效果。
技术研发人员:梁五元 邹威
受保护的技术使用者:明创慧远(贵州)技术有限公司
技术研发日:2021.09.28
技术公布日:2022/2/22
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。