1.本实用新型涉及机器人领域,尤其涉及一种机器人第五轴连接腕体。
背景技术:
2.工业机器人已广泛应用与工业生产中,尤其是在汽车板件的焊接、搬运过程中,这些工业机器人的手腕部需要做摆动和圆周旋转两种运动,从而满足工业生产的需求。因此,工业机器人的手腕通常包括与大臂连接的腕体、腕体内部的传动装置带动腕体外部的连接板摆动,并带动连接板上的旋转法兰旋转,实现手腕部的两个自由度的运动。现有的机器人手腕摆动和转动相互干涉、结构复杂,装配繁琐,运行不稳定。
技术实现要素:
3.为了解决上述问题,本实用新型提供了一种机器人受力均匀、便于安装的第五轴连接腕体。
4.为了到达上述目的,本实用新型设计的机器人第五轴连接腕体,所述的机器人第五轴连接腕体的底部是一个方型腔体,与方型腔体相邻的一个侧面上设有向外的凸圆,凸圆内径上设有键槽,在方形腔体的底侧上,向凸圆端的相反端延伸出一块跑道型凸块,跑道型凸块的末端是半圆型,其在远离方型腔体的一侧上设有长条状凸缘,在长条状凸缘和跑道型凸块的侧边沿之间设有容纳槽,跑道型凸块在长条状凸缘和方型腔体的靠近凸圆侧边沿之间设有凹陷区,凹陷区的正中位上设有一圆柱凸起,方型腔体的底部一侧沿着跑道型凸块的外侧边沿向方型腔体开口侧凹陷有一凹台,凹台上设有一连接通孔,长条状凸缘内的两端各设有一通孔,在跑道型凸块侧的通孔为固定通孔,在方形腔体侧的为安装通孔,跑道型凸块的靠近方型腔体一侧上,在固定通孔和跑道型凸块之间设有固定环槽。这样设计的特点是,将原本的整体式腕体改装成了组合式腕体,连接腕体能和与之适配的盖体相配合,盖体组装在方型腔体的开口侧,且在对应的位置同样设计有固定环槽和固定通孔,而机器人的工作机构安装在组装而成的固定环槽内,这降低了腕体的结构复杂程度,同时降低了生产成本。
5.进一步的方案是,所述的方型腔体在凹台所在侧面以及其对面上各设有一方型块,跑道型凸块的圆弧顶端设有一方型块,三个方型块皆平行于方型腔体的开口侧面。通过设置凸出于整个腕体外的方型块,提高腕体的运输安装的便利性,并方便与其他部件对接后固定线束。
6.更进一步的方案是,所述的方型腔体的内部设有加强筋。加强筋的目的是为了加强机器人腕体的强度,从结构上增加机器人的负载能力。
7.本实用新型所设计的机器人第五轴连接腕体,使用了组合式设计,将原有的整体式连接腕体拆解成腕体和盖体,这降低了腕体的结构难度,也降低了生产成本,同时加强筋结构的设计增加了机器人腕体的强度,整体上增加了机器人的负载。
附图说明
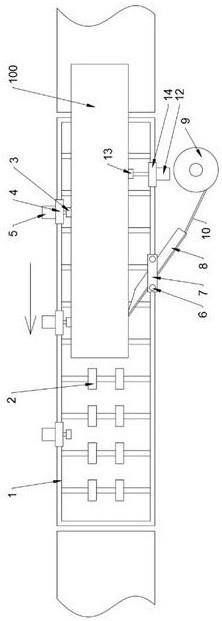
8.图1是实施例1的结构示意图;
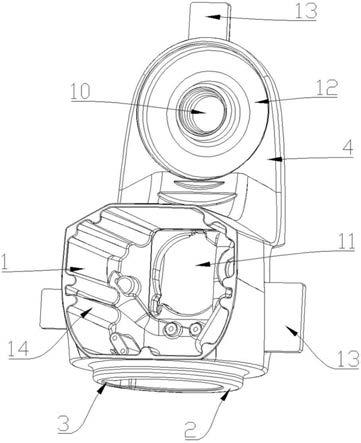
9.图2是图1的背面结构示意图。
10.1-方型腔体、2-凸圆、3-键槽、4-跑道型凸块、5-长条状凸缘、6-容纳槽、7-凹陷区、8-凹台、9-连接通孔、10-固定通孔、11-安装通孔、
11.12-固定环槽、13-方型块、14-加强筋
具体实施方式
12.为更进一步阐述本实用新型为实现预定实用新型目的所采取的技术手段及功效,以下结合附图及较佳实施例,对依据本实用新型的具体实施方式、结构、特征及其功效,详细说明如后。
13.实施例1:
14.如图1、图2所示,本实施例描述的一种机器人第五轴连接腕体,所述的机器人第五轴连接腕体的底部是一个方型腔体1,与方型腔体1相邻的一个侧面上设有向外的凸圆2,凸圆2内径上设有键槽3,在方形腔体2的底侧上,向凸圆2端的相反端延伸出一块跑道型凸块4,跑道型凸块4的末端是半圆型,其在远离方型腔体1的一侧上设有长条状凸缘5,在长条状凸缘5和跑道型凸块4的侧边沿之间设有容纳槽6,跑道型凸块4在长条状凸缘5和方型腔体1的靠近凸圆2侧边沿之间设有凹陷区7,凹陷区7的正中位上设有一圆柱凸起,方型腔体1的底部一侧沿着跑道型凸块4的外侧边沿向方型腔体1开口侧凹陷有一凹台8,凹台8上设有一连接通孔9,长条状凸缘5内的两端各设有一通孔,在跑道型凸块4侧的通孔为固定通孔10,在方形腔体侧1的为安装通孔11,跑道型凸块4的靠近方型腔体1一侧上,固定通孔10和跑道型凸块4之间设有固定环槽12。
15.所述的方型腔体1在凹台8所在侧面以及其对面上各设有一方型块13,跑道型凸块4的圆弧顶端设有一方型块13,三个方型块13皆平行于方型腔体1的开口侧面,所述的方型腔体1的内部设有加强筋14。
16.以上所述,仅是本实用新型的较佳实施例而已,并非对本实用新型作任何形式上的限制,虽然本实用新型已以较佳实施例揭示如上,然而并非用以限定本实用新型,任何本领域技术人员,在不脱离本实用新型技术方案范围内,当可利用上述揭示的技术内容做出些许更动或修饰为等同变化的等效实施例,但凡是未脱离本实用新型技术方案内容,依据本实用新型的技术实质对以上实施例所作的任何简介修改、等同变化与修饰,均仍属于本实用新型技术方案的范围内。
技术特征:
1.一种机器人第五轴连接腕体,其特征在于,所述的机器人第五轴连接腕体的底部是一个方型腔体(1),与方型腔体(1)相邻的一个侧面上设有向外的凸圆(2),凸圆(2)内径上设有键槽(3),在方型腔体(1)的底侧上,向凸圆(2)端的相反端延伸出一块跑道型凸块(4),跑道型凸块(4)的末端是半圆型,其在远离方型腔体(1)的一侧上设有长条状凸缘(5),在长条状凸缘(5)和跑道型凸块(4)的侧边沿之间设有容纳槽(6),跑道型凸块(4)在长条状凸缘(5)和方型腔体(1)的靠近凸圆(2)侧边沿之间设有凹陷区(7),凹陷区(7)的正中位上设有一圆柱凸起,方型腔体(1)的底部一侧沿着跑道型凸块(4)的外侧边沿向方型腔体(1)开口侧凹陷有一凹台(8),凹台(8)上设有一连接通孔(9),长条状凸缘(5)内的两端各设有一通孔,在跑道型凸块(4)侧的通孔为固定通孔(10),在方型腔体(1)侧的为安装通孔(11),跑道型凸块(4)的靠近方型腔体(1)一侧上,在固定通孔(10)和跑道型凸块(4)之间设有固定环槽(12)。2.根据权利要求1所述的机器人第五轴连接腕体,其特征在于,所述的方型腔体(1)在凹台(8)所在侧面以及其对面上各设有一方型块(13),跑道型凸块(4)的圆弧顶端设有一方型块(13),三个方型块(13)皆平行于方型腔体(1)的开口侧面。3.根据权利要求1所述的机器人第五轴连接腕体,其特征在于,所述的方型腔体(1)的内部设有加强筋(14)。
技术总结
本实用新型涉及一种机器人第五轴连接腕体,所述的机器人第五轴连接腕体的底部是一个方型腔体,与方型腔体相邻的一个侧面上设有向外的凸圆,凸圆内径上设有键槽,在方形腔体的底侧上,向凸圆端的相反端延伸出一块跑道型凸块,跑道型凸块的末端是半圆型,其在远离方型腔体的一侧上设有长条状凸缘,在长条状凸缘和跑道型凸块的侧边沿之间设有容纳槽,跑道型凸块在长条状凸缘和方型腔体的靠近凸圆侧边沿之间设有凹陷区,凹陷区的正中位上设有一圆柱凸起,方型腔体的底部一侧沿着跑道型凸块的外侧边沿向方型腔体开口侧凹陷有一凹台,凹台上设有一连接通孔,跑道型凸块的靠近方型腔体一侧上,在固定通孔和跑道型凸块之间设有固定环槽。槽。槽。
技术研发人员:陈蒿 秦伟 李广
受保护的技术使用者:格林策巴赫机械(嘉善)有限公司
技术研发日:2021.10.12
技术公布日:2022/2/22
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。