1.本实用新型涉及药品加工设备领域,具体为一种适用于狭小空间的容器自动转移装置。
背景技术:
2.目前,中药饮片的煎制生产的过程中容器的流转大多依靠人工搬运或半自动化设备进行;在为了提高中药饮片的生产效率,现通过容器在各个工位依次流转完成中药煎制,并且容器整体进行回转式流转,其中在整个煎药过程的末尾和开始处需要进行容器的输送转移进而形成容器的回转,但是该转移区域往往空间狭小,并且需要该变容器的输送方向和输送位置;因此急需一种适用于狭小空间且能进行高效转移的转移设备。
技术实现要素:
3.针对上述问题,本实用新型提供了一种适用于狭小空间的容器自动转移装置,其通过抓取机构抓取容器,翻转装置驱动抓取机构和容器进行转动,实现容器在两个输送线间进行转移,抓取机构和翻转装置的空间占用率低,使得输送线的布置可以更加的紧凑,提高了容器转移效率的同时大大提高了空间的利用率。
4.为实现上述目的,本实用新型提供了如下技术方案:
5.一种适用于狭小空间的容器自动转移装置,包括:
6.抓取机构;以及
7.动力机构;
8.所述动力机构驱动所述抓取机构翻转使得被夹持物体的放置状态改变及位置转移。
9.作为改进,所述动力机构驱动所述抓取机构翻转改变被夹持物体的开口朝向。
10.作为改进,所述动力机构驱动所述抓取机构翻转使得被夹持物体在两组输送线上完成转移输送,两组所述输送线输送方向的夹角为2α。
11.作为改进,所述抓取机构通过转动架与所述动力机构间接联接。
12.作为改进,垂直于所述抓取机构夹紧方向的中线与所述动力机构的轴线夹角为α
°
。
13.作为改进,所述抓取机构的转动角度为180
°
。
14.作为改进,所述转动架包括垂直所述动力机构轴线设置的安装件、设置在所述安装件一端用于安装所述抓取机构的安装板以及设置在所述安装件另一端的配重块。
15.作为改进,所述抓取机构包括两组夹爪单元;以及
16.驱动组件a;
17.所述驱动组件a驱动两组夹爪单元转动对物体进行夹持,夹持时,两组所述夹爪单元对物体始终保持夹紧状态。
18.作为改进,所述夹爪单元包括容器接触的定心单元。
19.作为改进,所述抓取机构还包括安装架,两组所述夹爪单元对称铰接设置在所述安装架上。
20.作为改进,所述驱动组件a包括安装在所述安装座上的动力单元以及动力连接所述动力单元和所述夹爪单元的联动组件,所述驱动组件a驱动所述联动组件转动进而驱动带动两组所述夹爪单元进行转动。
21.作为改进,所述驱动组件a还包括用于限制两组所述夹爪单元张开的锁止件。
22.作为改进,所述锁止件为与所述联动组件弹性抵触的弹簧单元。
23.作为改进,两个所述输送线高低设置。
24.作为改进,还包括:
25.机架;
26.升降机构,所述升降机构安装在所述机架内;
27.所述升降机构驱动所述动力机构进行上下移动,所述抓取机构与相应的所述输送线对应配合。
28.作为改进,所述升降机构包括上下滑动设置在所述机架上用于安装所述动力机构的滑动架以及驱动所述滑动架移动的抬升组件。
29.作为改进,所述升降机构包括上下滑动设置在所述机架上用于安装所述动力机构的滑动架以及驱动所述滑动架上下移动的抬升组件。
30.本实用新型的有益效果在于:
31.(1)本实用新型中抓取机构的安装面和翻转装置的轴线呈45
°
夹角,进而翻转装置配合抓取机构使得容器进行翻转并且完成在两个输送方向垂直的输送线间进行转移,抓取机构和翻转装置的空间占用率低,使得输送线与输送线间的布置更加的紧凑,提高了容器转移效率的同时大大提高了空间的利用率;
32.(2)本实用新型还通过升降机构驱动翻转装置和抓取机构进行上下移动,进而可实现容器在两个输送方向垂直并且有高低落差的输送线间进行转移,提高空间利用率的同时可使得输送线的布置方式更加的多样化,保证了容器的输送效率;
33.(3)本实用新型中滑动块移动驱动夹爪单元转动夹取容器的同时弹簧单元对滑动块产生作用力,使得在容器的夹取过程中,气缸停止工作后在弹簧的作用下夹爪仍然能保持对容器的夹紧状态,提高了设备使用的安全性。
34.综上所述,本实用新型具有结构简单、设计巧妙、转移效率高及转移效果好等优点,尤其适用于清理后的容器向调剂机构的转移。
附图说明
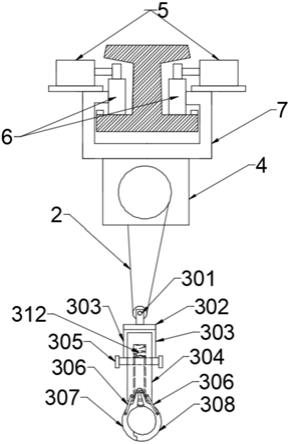
35.图1为本实用新型的整体结构示意图;
36.图2为图1中a 处放大图;
37.图3为抓取机构结构示意图图一;
38.图4为图3中b处放大图;
39.图5为夹爪单元剖视结构图;
40.图6为抓取机构结构示意图图二;
41.图7为图6中c处放大图;
42.图8为联动组件爆炸机构图;
43.图9为联动组件剖视结构图;
44.图10为容器夹取状态示意图;
45.图11为抓取机构安装状态示意图;
46.图12为抬升组件结构示意图;
47.图13为容器输送状态示意图图一;
48.图14为容器输送状态示意图图二;
49.图15为容器输送状态示意图图三。
具体实施方式
50.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
51.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本实用新型的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
52.实施例一
53.如图1和图2所示,一种适用于狭小空间的容器自动转移装置,包括:
54.抓取机构1;以及
55.动力机构2;
56.所述动力机构2驱动所述抓取机构1翻转使得被夹持物体的放置状态改变及位置转移。
57.需要说明的是,所述动力机构2为气动旋转装置。
58.进一步的,所述动力机构2驱动所述抓取机构1翻转改变使得被夹持物体的开口朝向。
59.进一步的,所述抓取机构1通过转动架21与所述动力机构2间接联接。
60.进一步的,所述动力机构2驱动所述抓取机构1翻转使得被夹持物体在两组输送线3上完成转移输送,两组所述输送线3输送方向的夹角为2α。
61.进一步的,垂直于所述抓取机构1夹紧方向的中线与所述动力机构2的轴线夹角为α。
62.需要说明的是,本实用新型中两组所述输送线3的输送方向垂直,即α=45
°
。
63.进一步的,所述抓取机构2的转动角度为180
°
。
64.进一步的,所述转动架21包括垂直所述动力机构2轴线设置的安装件212、设置在所述安装件212一端用于安装所述抓取机构1的安装板213以及设置在所述安装件212另一端的配重块211。
65.需要说明的是,所述安装件212与所述动力机构2的动力输出端连接;所述抓取机构1安装在所述安装板213上。
66.进一步的,如图3至图10所示,所述抓取机构1包括两组夹爪单元12;以及
67.驱动组件a13;
68.所述驱动组件a13驱动两组夹爪单元12转动对物体进行夹持,夹持时,两组所述夹爪单元12对物体始终保持夹紧状态。
69.进一步的,所述夹爪单元12包括容器接触的定心单元120。
70.进一步的,所述抓取机构1还包括安装架11,两组所述夹爪单元12对称铰接设置在所述安装架11上。
71.需要说明的是,如图6所示,所述夹爪单元12包括呈l形的夹爪本体121,所述夹爪本体121包括一体成型的驱动臂1211和从动臂1212,所述夹爪本体121与所述安装架11的铰接点位于所述驱动臂1211和所述从动臂1212的连接处。
72.更需要说明的是,所述定心单元120包括所述从动臂1212的端部转动安装有接触块1213,所述接触块1213和所述从动臂1212通过弹簧1214弹性连接,所述接触块1213与容器的接触面上还设置有两组挡条1215,夹取时,容器的加强筋卡在两组所述挡条1215之间。
73.更需要说明的是,如图6所示,所述驱动臂1211和所述从动臂1212一体成型设置使得所述夹爪单元12的强度更加高,提高了所述夹爪单元12的承载能力,同时所述接触块1213与容器的接触面设置为圆弧形,所述接触块1213与容器接触时可快速实现容器的定心,实现快速抓取。
74.值得一提的是,如图10所示,夹取容器,加强筋卡在两组所述挡条1215的中间位置,并且所述接触块1213和所述挡条1215与容器的接触位置为聚氨酯材料,使得容器不会被夹坏的同时能被夹的更加牢固。
75.进一步的,如图7和图8所示,所述驱动组件a13包括安装座131、安装在所述安装座131上的动力单元132以及动力连接所述动力单元132和所述夹爪单元12的联动组件133。
76.需要说明的是,所述动力单元132有选为气缸驱动单元。
77.进一步的,如图9所示,所述联动组件133包括两组对称设置且二者间形成导向通道1331的夹板1332、安装在所述夹爪单元12上的连接件1333以及滑动设置在所述导向通道1331内且与所述连接件1333铰接的滑动块1334;所述滑动块1334与所述动力单元132的动力输出端连接。
78.需要说明的是,两组所述夹板1332使得所述滑动块1334移动的更加稳定。
79.更需要说明的是,所述动力单元132的动力轴与所述滑动块1334卡接,所述动力单元132的动力轴伸长驱动所述滑动块1334移动,进而带动两组所述夹爪单元12转动,此时两组所述夹爪单元12松开容器;所述动力单元132的动力轴缩短驱动所述滑动块1334移动,进而带动两组所述夹爪单元12转动,此时两组所述夹爪单元12夹紧容器。
80.进一步的,如图7和图8所示,所述驱动组件a13还包括用于限制两组所述夹爪单元12张开的锁止件1335。
81.进一步的,所述锁止件1335为与所述联动组件133弹性抵触的弹簧单元。
82.需要说明的是,弹簧单元为两组弹性连接所述滑动块1334和所述安装架11的弹簧,所述夹爪单元1夹紧容器时,弹簧单元对所述滑动块1334产生推力,当所述动力单元132停止工作时,弹簧单元对所述滑动块1334产生的推力仍然能使所述夹爪单元12将容器夹紧,保证了设备使用的安全性。
83.更需要说明的是,容器在清洗后需要倒置,其转移至调剂单元时需要进行翻转,传统容器转移过程中夹取、抬升、翻转、放下的过程简化为夹取、翻转、放下大大提高了容器的输送效率。
84.实施例二
85.为简便起见,下文仅描述实施例二与实施例一的区别点;该实施例二与实施例一的不同之处在于:
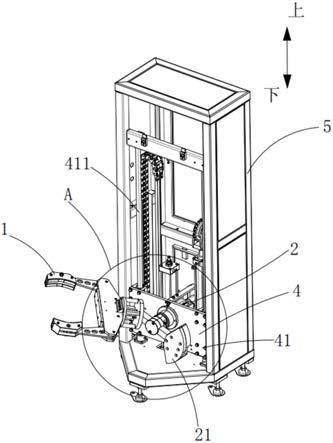
86.如图12至图15所示,两个所述输送线3高低设置,一种适用于狭小空间的容器自动转移装置,还包括机架5和升降机构4,所述升降机构4安装在所述机架5内,所述升降机构4驱动所述动力机构2进行上下移动,所述抓取机构1与相应的所述输送线3对应配合。
87.进一步的,所述升降机构4包括上下滑动设置在所述机架5上用于安装所述动力机构2的滑动架41以及驱动所述滑动架41移动的抬升组件42。
88.进一步的,所述抬升组件42包括安装在所述机架5内部的驱动组件c421以及动力连接所述驱动组件c421和所述滑动架41的链轮传动组件422。
89.需要说明的是,所述驱动组件c421为的气缸驱动单元,所述链轮传动组件422包括随所述驱动组件c421的动力轴上下移动且可转动设置的链轮4221以及连接所述滑动架41和所述机架5且绕过所述链轮4221的链条4222。
90.更需要说明的是,所述动力机构2和所述转动架21安装在所述滑动架41上,所述滑动架41的上下移动提高了所述输送线3布置方式的多样性,进而提高容器的输送效率。
91.值得一提的是,所述机架5内还设置有用于引导所述滑动架41的上下移动的导向杆411,提高所述滑动架41移动的稳定性。
92.工作过程
93.实际生产中,容器在清洗完成后向调剂接料工位输送的过程为最后一道工序与第一道的工序进行衔接,该转移区域被设置在墙角,区域狭小,用于输送容器的两组所述输送线3输送方向垂直且高低落差设置,高位的所述输送线3输送完成清洗的容器,低位的所述输送线3运送容器调剂接料,所述抓取机构1对高位所述输送线3输送的容器进行抓取,所述动力机构3进行转动,之后所述升降机构4驱动所述抓取机构1、所述动力机构3和容器下移,之后容器被放置在低位的输送线3上,之后所述抓取机构1将容器松开,进而完成容器的转移。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。