1.本实用新型涉及阀门技术领域,具体为一种水下阀门操作延伸装置。
背景技术:
2.随着海上石油天然气工业技术的迅速发展,采用水下生产设施进行海上油气田开发的模式应用越来越普遍,处在浅水区域的水下设施,其油气管线通常需要安装保护罩结构,用于防止落物冲击及渔网拖挂。
3.一般情况下,水下设施的管线与保护罩结构,在管线安装之后,紧接着进行保护罩的安装,在这种情况下,水下阀门与保护罩顶板之间的垂向距离,可在水下设施设计时确定,同时,保护罩顶板可以根据水下阀门操作接口的位置,进行相应的开孔,阀门操作接口与保护罩顶板开孔之间不存在横向偏差,如果阀门与保护罩顶板之间的垂向距离较大,扭矩工具无法直接操作时,可以在阀门操作接口上,添加一段固定式的延长杆,将阀门操作接口垂直延伸到保护罩顶板,进行阀门操作。
4.但是,水下设施管线安装到海床需要几个月或者更长的时间,等到那时候再对保护罩结构进行安装,会因为管线沉降,导致水下设施管线上的阀门操作接口与保护罩结构顶板之间的垂向和横向相对距离存在一定的误差,而采用常规的固定式阀门操作延长杆,导致无法进行操作。
技术实现要素:
5.本实用新型的目的在于针对现有技术的不足之处,提供一种水下阀门操作延伸装置,以解决背景技术中提出的问题。
6.为实现上述克服由于水下设施管线沉降及海床地形调查误差导致的不确定性,补偿阀门操作接口与水下设施保护罩顶板之间的垂向与横向偏差,保证水下阀门操作的目的,本实用新型提供如下技术方案:一种水下阀门操作延伸装置,包括rov接收筒组件、rov操作杆组件、上十字轴组件、上万向节叉组件、伸缩组件、下万向节叉组件、下十字轴组件、底部操作杆组件。
7.作为本实用新型的优选技术方案,所述rov接收筒组件包括挡圈、内六角圆柱头螺钉、rov接收筒、o形圈、ptfe密封圈、o形圈、固定杆、固定板、吊装把手,所述挡圈的外部螺纹连接有内六角圆柱头螺钉,所述内六角圆柱头螺钉的外部螺纹连接有rov接收筒,所述rov接收筒的内部设置有下o型圈,所述rov接收筒的内部设置有ptee密封圈,所述rov接收筒的内部设置有上o型圈,所述rov接收筒的外部设置有平台,所述平台的外部固定连接有固定杆,所述固定杆的外部固定连接有固定板,所述固定板的外部活动连接有吊装把手。
8.作为本实用新型的优选技术方案,所述rov操作杆组件包括rov操作杆,所述rov操作杆的外部设置有内六角圆柱头螺钉、所述内六角圆柱头螺钉的外部设置有盖板。
9.作为本实用新型的优选技术方案,所述上十字轴组件、下十字轴组件,包括十字轴横轴、十字轴横轴轴芯、十字轴纵轴、十字轴套。
10.作为本实用新型的优选技术方案,所述上万向节叉组件,包括上万向节叉、内六角圆柱头螺钉、盖板,所述下万向节叉组件包括下万向节叉、内六角圆柱头螺钉、盖板。
11.作为本实用新型的优选技术方案,所述伸缩组件,包括伸缩杆和伸缩套筒。
12.作为本实用新型的优选技术方案,所述底部操作杆组件,包括底部操作杆、内六角圆柱头螺钉、盖板。
13.与现有技术相比,本实用新型提供了一种水下阀门操作延伸装置,具备以下有益效果:
14.该一种水下阀门操作延伸装置,通过设置rov接收筒组件、rov操作杆组件、上十字轴组件、上万向节叉组件、伸缩组件、下万向节叉组件、下十字轴组件、底部操作杆组件,使得装置可以克服由于水下设施管线沉降及海床地形调查误差导致的不确定性,补偿阀门操作接口与水下设施保护罩顶板之间的垂向与横向偏差,保证水下阀门操作。
附图说明
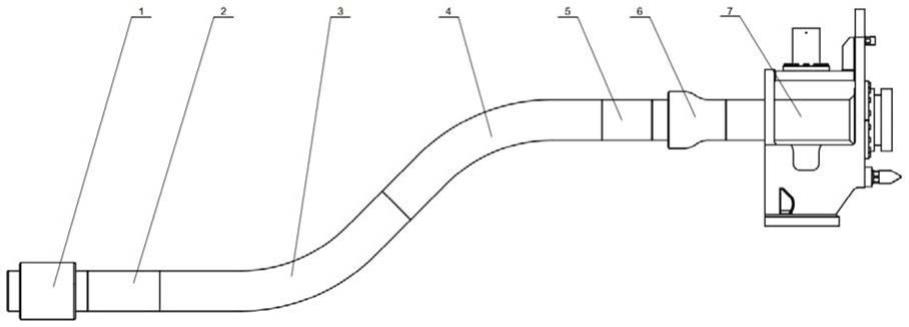
15.图1为本实用新型整体结构轴侧图;
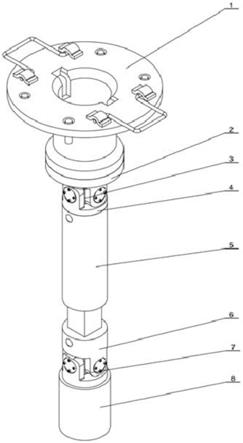
16.图2为本实用新型整体结构剖视图。
17.图中:1、rov接收筒组件;2、rov操作杆组件;3、上十字轴组件;4、上万向节叉组件;5、伸缩组件;6、下万向节叉组件;7、下十字轴组件;8、底部操作杆组件;9、底部操作杆;10、内六角圆柱头螺钉;11、盖板;12、下万向节叉;13、固定轴销;14、伸缩杆;15、伸缩套筒;16、上万向节叉;17、十字轴横轴;18、十字轴横轴轴芯;19、十字轴纵轴;20、十字轴套;21、挡圈;2、内六角圆柱头螺钉;23、rov接收筒;24、rov操作杆;25、下o形圈;26、ptfe密封圈;27、上o形圈;28、固定杆;29、固定板;30、吊装把手。
具体实施方式
18.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
19.请参阅图1-2,本实施方案中:一种水下阀门操作延伸装置,包括:rov接收筒组件1、rov操作杆组件2、上十字轴组件3、上万向节叉组件4、伸缩组件5、下万向节叉组件6、下十字轴组件7、底部操作杆组件8,rov接收筒组件1包括挡圈21,挡圈21的外部螺纹连接有内六角圆柱头螺钉22,内六角圆柱头螺钉22的外部螺纹连接有rov接收筒23,rov接收筒21的内部设置有下o型圈25,rov接收筒23的内部设置有ptee密封圈26,rov接收筒23的内部设置有上o型圈27,rov接收筒23的外部设置有平台,平台的外部固定连接有固定杆28,固定杆28的外部固定连接有固定板29,固定板29的外部活动连接有吊装把手30,内六角圆柱头螺钉22有不少于两个且每个内六角圆柱头螺钉22规格尺寸相同,每个内六角圆柱头螺钉22分别与挡圈21、rov接收筒23螺纹连接,固定杆28有四个且四个固定杆28的规格尺寸相同,四个固定杆28均与rov接收筒23连接,rov接收筒23通过四根固定杆28,固定在水下设施保护罩顶板上,为rov接收筒23提供支撑,同时限制rov接收筒23的旋转,固定板29有四个且四个固定板29的规格尺寸相同,四个固定板29均与平台固定连接,吊装把手30有两个且两个吊装把
手30的规格尺寸相同,两个吊装把手30分别与四个固定板29活动连接,rov操作杆组件2包括rov操作杆24,rov操作杆24的外部设置有内六角圆柱头螺钉10、内六角圆柱头螺钉10的外部设置有盖板11,内六角圆柱头螺钉10有四个且分为两组,每组内六角圆柱头螺钉10的规格尺寸相同,每组内六角圆柱头螺钉10分别与两个盖板11螺纹连接,rov操作杆24与rov扭矩工具配合,能够接收并传递扭矩工具输入的扭矩及旋转运动。
20.上十字轴组件3、下十字轴组件7,包括十字轴横轴17、十字轴横轴轴芯18、十字轴纵轴19、十字轴套20,十字轴套20有两个且两个十字轴套20的规格尺寸相同,十字轴横轴17、十字轴横轴轴芯18、十字轴纵轴19与十字轴套20连接,十字轴和万向节叉能够调节伸缩组件5与顶部rov接收筒23、底部操作杆9之间的相对角度,上万向节叉组件4,上万向节叉16、内六角圆柱头螺钉10、盖板11,下万向节叉组件6,下万向节叉12、内六角圆柱头螺钉10、盖板11,上万向节叉16与rov操作杆24连接,下万向节叉12均与四个内六角圆柱头螺钉10螺纹连接,伸缩组件5,包括伸缩杆14和伸缩套筒15,伸缩杆14与伸缩套筒15滑动连接且伸缩杆14的规格与伸缩套筒15相匹配,伸缩组件5通过伸缩套筒15与伸缩杆14之间的相对运动,能够实现轴向伸缩,底部操作杆组件8包括底部操作杆9、内六角圆柱头螺钉10、盖板11,底部操作杆9与十字轴套20连接,底部操作杆9能够与水下阀门操作接口配合,对阀门进行操作。
21.本实用新型的工作原理:假设海底管线已经安装就位,水下阀门安装在海底管线上,此时还未安装保护罩结构,海底管线安装就位很长时间之后,再安装保护罩结构,由于管线沉降以及测量误差因素,水下阀门操作接口与保护罩结构顶板开孔之间,存在垂向和横向位置偏差,这时将本水下阀门操作延伸装置,以伸缩套筒15和伸缩杆14为界,预装配成上、下两个独立的子装配体,其中上部子装配体包括:从伸缩套筒15到rov接收筒组件1;下部子装配体包括:从伸缩杆14到底部操作杆组件8,安装时,先安装下部子装配体,由潜水员将下部子装配体的底部操作杆9与水下阀门操作接口对接,然后,将上部子装配体,通过四根固定杆28,预安装固定在水下设施保护罩顶板上,随保护罩结构一起下水安装,上部子装配体和下部子装配体,均安装就位后,由潜水员在水下将伸缩杆14插入伸缩套筒15,并根据顶部rov接收筒23和底部操作杆9之间在垂向和横向上的相对位置,调节伸缩套筒15和伸缩杆14的角度和伸缩量,完成水下对阀门的安装与调节。
22.最后应说明的是:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。