深海auv集群被动式释放回收装置及其操作方法
技术领域
1.本发明涉及深海auv释放和回收应用设备技术领域,尤其是一种深海auv集群被动式释放回收装置及其操作方法。
背景技术:
2.在使用auv在海洋中水下执行目标物搜索任务时,现有技术中的auv释放回收装置常常进行单次单台auv的作业,多为在海面上对单个auv进行释放回收操作,搜索覆盖面窄,而且在当前严峻的复杂形势下,不具有隐蔽释放回收的能力,容易被发现而无法正常作业。
3.因此,普通auv释放回收装置不适合应用在隐蔽环境和auv的群体的作业中。
4.针对以上原因,本发明设计了一种即可以实现在深海隐蔽环境下释放回收auv,又可以实现auv集群释放、作业和回收功能的装置,具有隐蔽作业、作业效率高、作业覆盖面广的优点。
技术实现要素:
5.本技术人针对上述现有生产技术中的缺点,提供一种深海auv集群被动式释放回收装置及其操作方法,从而有效的解决了深海中的密封问题,可以实现auv集群在深海隐蔽环境下作业和释放、作业和回收的功能,并具有隐蔽作业、作业效率高、作业覆盖面广的优点。
6.本发明所采用的技术方案如下:
7.一种深海auv集群被动式释放回收装置,包括固定框架,所述固定框架的内部安装有收放筒系统,所述收放筒系统一部分外形呈圆柱体结构,圆柱体结构的两端分别设置有一号圆形轨道和二号圆形轨道,所述固定框架的两端分别固定安装有滚轮,两端的滚轮分别与一号圆形轨道和二号圆形轨道啮合;收放筒系统的中部外表面固定有大齿轮,还包括回转电机,所述回转电机的输出端安装小齿轮,所述小齿轮与大齿轮啮合;所述固定框架上还安装有接近开关。
8.作为上述技术方案的进一步改进:
9.所述收放筒系统的具体结构为:包括四个收放筒本体,四个收放筒本体组成圆柱体结构,四个收放筒本体的尾部固定连接有收放筒球头,所述收放筒球头的尾部与液压罐连通,液压罐连接补偿器;
10.单个收放筒本体的内部配合安装有滑动活塞,滑动活塞的一端嵌入有电磁铁,所述电磁铁通过电缆与控制器连接,控制器固定在收放筒球头中;
11.收放筒本体的筒口设置有多个收放对中滚轮;
12.还包括拉伸弹簧,拉伸弹簧一端与滑动活塞固定连接,拉伸弹簧另一端与收放筒球头固定连接;
13.收放筒球头内部安装有液压油控制阀箱,液压油控制阀箱一端穿过收放筒球头和收放筒本体连通,另一端穿过收放筒球头和液压罐连通。
14.四个收放筒本体之间通过螺旋相互固定。
15.单个收放筒本体与收放筒球头之间布置有o型圈静密封实现静密封。
16.所述滑动活塞和收放筒本体之间安装有动密封,并将动密封限位夹紧,实现动密封。
17.收放筒本体的截面为四分之一圆结构。
18.收放筒本体的外部安装有与接近开关配合的挡板。
19.所述固定框架成中空的长方体结构,固定框架的长度大于等于收放筒系统的长度。
20.auv端部安装有永磁体。
21.一种深海auv集群被动式释放回收装置的操作方法,包括如下操作步骤:
22.(一)在下水前;
23.只有电磁铁通过控制器供电工作,将auv的永磁体吸住,拉伸弹簧将滑动活塞紧紧拉回,保持auv布置在收放筒本体内;
24.(二)当auv需要进行出航工作时;
25.回转电机开始进行回转,带动小齿轮回转,带动大齿轮旋转,进而收放筒系统通过一号圆形轨道和二号圆形轨道围绕滚轮进行旋转,收放筒系统中的挡板发生旋转,当挡板靠近接近开关时,系统检测到该auv已经旋转到位,液压油控制阀箱开始工作,给收放筒本体内充油,收放筒本体内压力升高,将滑动活塞顶出最高位,控制器给电磁铁断电,电磁铁不再给auv中的永磁体提供磁性吸力,auv自动脱落离开,auv开始正常出航工作;
26.(三)当需要回收auv时;
27.回转电机开始进行回转,带动小齿轮回转,带动大齿轮旋转,进而收放筒系统通过一号圆形轨道和二号圆形轨道围绕滚轮进行旋转,收放筒系统中的挡板旋转,当挡板靠近接近开关时,系统检测到该收放筒本体已经旋转到位,控制器给电磁铁供电,电磁铁提供磁性吸力,此时auv航行到电磁铁附近,将永磁体对准电磁铁外部,au被电磁铁吸附;液压油控制阀箱开始工作,给收放筒本体内放油,收放筒本体内压力降低,拉伸弹簧将滑动活塞拉回,进而auv被回收到筒内,在auv回收的过程中,收放对中滚轮对auv进行自动较中,提高回收成功率,最终实现auv的回收工作。
28.本发明的有益效果如下:
29.本发明结构紧凑、合理,操作方便,通过采用多个收放筒本体、对中滚轮,动密封、油压补偿器、液压系统、活动活塞、拉伸弹簧、电磁铁和永磁体等部件互相配合与设计工作,即可以进行多个auv同时在深海隐蔽环境下作业,实现深海auv集群释放、作业和回收的功能,提高了作业效率、增大了作业覆盖面、提升了回收成功率。
附图说明
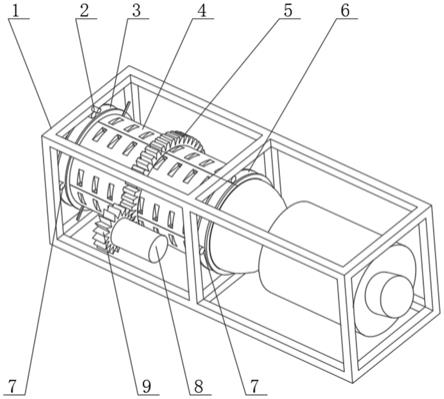
30.图1为本发明的结构示意图。
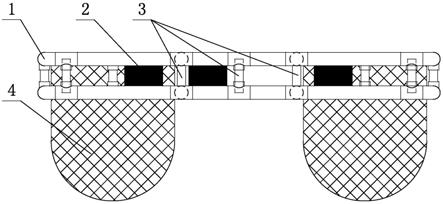
31.图2为本发明的主视图。
32.图3为本发明收放筒系统的结构示意图。
33.图4为本发明收放筒系统的内部结构示意图。
34.图5为本发明收放筒系统收放auv时的结构示意图。
35.其中:1、固定框架;2、接近开关;3、一号圆形轨道;4、收放筒系统;5、大齿轮;6、二号圆形轨道;7、滚轮;8、回转电机;9、小齿轮;10、auv;
36.101、永磁体;
37.401、收放对中滚轮;402、挡板;403、收放筒本体;404、收放筒球头;405、液压罐;406、补偿器;407、电磁铁;408、滑动活塞;409、拉伸弹簧;410、动密封;411、电缆;412、o型圈静密封;413、控制器;414、液压油控制阀箱。
具体实施方式
38.下面结合附图,说明本发明的具体实施方式。
39.如图1-图5所示,本实施例的深海auv集群被动式释放回收装置,包括固定框架1,固定框架1的内部安装有收放筒系统4,收放筒系统4一部分外形呈圆柱体结构,圆柱体结构的两端分别设置有一号圆形轨道3和二号圆形轨道6,固定框架1的两端分别固定安装有滚轮7,两端的滚轮7分别与一号圆形轨道3和二号圆形轨道6啮合;收放筒系统4的中部外表面固定有大齿轮5,还包括回转电机8,回转电机8的输出端安装小齿轮9,小齿轮9与大齿轮5啮合;固定框架1上还安装有接近开关2。
40.收放筒系统4的具体结构为:包括四个收放筒本体403,四个收放筒本体403组成圆柱体结构,四个收放筒本体403的尾部固定连接有收放筒球头404,收放筒球头404的尾部与液压罐405连通,液压罐405连接补偿器406;
41.单个收放筒本体403的内部配合安装有滑动活塞408,滑动活塞408的一端嵌入有电磁铁407,电磁铁407通过电缆411与控制器413连接,控制器413固定在收放筒球头404中;
42.收放筒本体403的筒口设置有多个收放对中滚轮401;
43.还包括拉伸弹簧409,拉伸弹簧409一端与滑动活塞408固定连接,拉伸弹簧409另一端与收放筒球头404固定连接;
44.收放筒球头404内部安装有液压油控制阀箱414,液压油控制阀箱414一端穿过收放筒球头404和收放筒本体403连通,另一端穿过收放筒球头404和液压罐405连通。
45.四个收放筒本体403之间通过螺旋相互固定。
46.单个收放筒本体403与收放筒球头404之间布置有o型圈静密封412实现静密封。
47.滑动活塞408和收放筒本体403之间安装有动密封410,并将动密封410限位夹紧,实现动密封。
48.收放筒本体403的截面为四分之一圆结构。
49.收放筒本体403的外部安装有与接近开关2配合的挡板402。
50.固定框架1成中空的长方体结构,固定框架1的长度大于等于收放筒系统4的长度。
51.auv10端部安装有永磁体101。
52.本实施例的深海auv集群被动式释放回收装置的操作方法,包括如下操作步骤:
53.(一)在下水前;
54.只有电磁铁407通过控制器413供电工作,将auv10的永磁体101吸住,拉伸弹簧409将滑动活塞408紧紧拉回,保持auv10布置在收放筒本体403内;
55.(二)当auv10需要进行出航工作时;
56.回转电机8开始进行回转,带动小齿轮9回转,带动大齿轮5旋转,进而收放筒系统4
通过一号圆形轨道3和二号圆形轨道6围绕滚轮7进行旋转,收放筒系统4中的挡板402发生旋转,当挡板402靠近接近开关2时,系统检测到该auv10已经旋转到位,液压油控制阀箱414开始工作,给收放筒本体403内充油,收放筒本体403内压力升高,将滑动活塞408顶出最高位,控制器413给电磁铁407断电,电磁铁407不再给auv10中的永磁体101提供磁性吸力,auv10自动脱落离开,auv10开始正常出航工作;
57.(三)当需要回收auv10时;
58.回转电机8开始进行回转,带动小齿轮9回转,带动大齿轮5旋转,进而收放筒系统4通过一号圆形轨道3和二号圆形轨道6围绕滚轮7进行旋转,收放筒系统4中的挡板402旋转,当挡板402靠近接近开关2时,系统检测到该收放筒本体403已经旋转到位,控制器413给电磁铁407供电,电磁铁407提供磁性吸力,此时auv10航行到电磁铁407附近,将永磁体101对准电磁铁407外部,auv10被电磁铁407吸附;液压油控制阀箱414开始工作,给收放筒本体403内放油,收放筒本体403内压力降低,拉伸弹簧409将滑动活塞408拉回,进而auv10被回收到筒内,在auv10回收的过程中,收放对中滚轮401对auv10进行自动较中,提高回收成功率,最终实现auv10的回收工作。
59.本发明的具体结构和功能如下:
60.主要包括固定框架1、接近开关2、一号圆形轨道3、收放筒系统4、大齿轮5、二号圆形轨道6、滚轮7、回转电机8、小齿轮9、auv10。
61.其中,收放筒系统4主要包括收放对中滚轮401、挡板402、收放筒本体403、收放筒球头404、液压罐405、补偿器406、电磁铁407、滑动活塞408、拉伸弹簧409、动密封410、电缆411、o型圈静密封412、控制器413、液压油控制阀箱414。
62.auv10前部球头内部嵌入永磁体101。
63.深海auv集群被动式释放回收装置由四个收放筒本体403组成,四个收放筒本体403通过螺栓相互固定,并且四个收放筒本体403和收放筒球头404固定连接,每个收放筒本体403和收放筒球头404之间布置有o型圈静密封412,实现静密封;大齿轮5固定在收放筒系统4中部和小齿轮9啮合,小齿轮9和回转电机8通过轴连接;一号圆形轨道3和二号圆形轨道6分别布置在收放筒系统4的前后端和滚轮7啮合,滚轮7固定在固定框架1上;电磁铁407嵌入在滑动活塞408中,通过电缆411和控制器413连接,控制器413固定在收放筒球头404中;拉伸弹簧409一端和滑动活塞408固定连接,拉伸弹簧409一端和收放筒球头404固定连接;滑动活塞408和收放筒本体403将动密封410限位夹紧,实现动密封;液压油控制阀箱414和收放筒球头404固定连通,液压油控制阀箱414一端穿过收放筒球头404和收放筒本体403连通,另一端穿过收放筒球头404和液压罐405连通;补偿器406和液压罐405固定连通,实现液压补偿的功能。
64.实际工作过程中:
65.深海auv集群被动式释放回收装置在工作时,一次可以搭载四台auv10进行深海下潜工作,在下水前,只有电磁铁407通过控制器413供电工作,将auv10的永磁体101吸住,拉伸弹簧409将滑动活塞408紧紧拉回,保持auv10布置在收放筒本体403内。
66.当需要某auv10进行出航工作时,回转电机8开始进行回转,带动小齿轮9回转,带动大齿轮5旋转,进而收放筒系统4通过一号圆形轨道3和二号圆形轨道6围绕滚轮7进行旋转,收放筒系统4中的挡板402旋转,当挡板402靠近接近开关2时,系统检测到该auv10已经
旋转到位,液压油控制阀箱414开始工作,给收放筒本体403内充油,收放筒本体403内压力升高,将滑动活塞408顶出最高位,控制器413给电磁铁407断电,电磁铁407不再给auv10中的永磁体101提供磁性吸力,auv10自动脱落离开,auv10开始正常出航工作。
67.当回收某auv10时,回转电机8开始进行回转,带动小齿轮9回转,带动大齿轮5旋转,进而收放筒系统4通过一号圆形轨道3和二号圆形轨道6围绕滚轮7进行旋转,收放筒系统4中的挡板402旋转,当挡板402靠近接近开关2时,系统检测到该收放筒本体403已经旋转到位,控制器413给电磁铁407供电,电磁铁407提供磁性吸力,此时auv10航行到电磁铁407附近,将永磁体101对准电磁铁407外部,auv10被电磁铁407吸附,液压油控制阀箱414开始工作,给收放筒本体403内放油,收放筒本体403内压力降低,拉伸弹簧409将滑动活塞408拉回,进而auv10被回收到筒内,在auv10回收的过程中,收放对中滚轮401对auv10进行自动较中,提高回收成功率,最终实现auv10的回收工作。
68.以上描述是对本发明的解释,不是对发明的限定,本发明所限定的范围参见权利要求,在本发明的保护范围之内,可以作任何形式的修改。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。