1.本发明属于海洋探测及海上环境波浪能采集领域,具体为一种自供能漂浮式仿生海洋探测龟。
背景技术:
2.为了保护海洋生态环境、合理利用海洋资源,对海洋环境进行动态监测是必可不少的手段。然而,对海洋环境进行动态监测使用的设备一般都是耗电设备,对海洋环境进行动态监测时,监测设备一般都放置于海底或者远离陆地的海洋面上,电力供给和电源更换不便。另外,许多监测设备一般都是固定或说定向监测的,例如,只能监测同一方向的信息。
技术实现要素:
3.针对现有技术存在的上述问题,本发明的目的是提供一种自供能漂浮式仿生海洋探测龟,利用波浪能量,给仿生海洋探测龟进行电力的供给,使所述探测龟实现自供能,不需要额外电力设备,波浪能量采集的效率高,能够适应海上的恶劣环境,无论是海平面产生波浪导致的螺杆上移还是归于平静导致的螺杆下移,都会产生机械运动,从而产生电能,提高了机电转换效率,所述探测龟结构新颖、简单、设计合理,通过海浪的拖拽作用,使采集系统内部机械传动结构运动,提高了采集系统的敏感性,吸收了波浪能,有效降低了探测龟的零部件损坏,提高了漂浮式设备的稳定性。
4.为了实现上述目的,本发明所采用的技术方案是:
5.一种自供能漂浮式仿生海洋探测龟,包括龟本体、绳索和锚,龟本体包括壳体和安装在壳体上的龟前爪、龟后爪、龟尾、前爪驱动机构、后爪驱动机构、鱼尾驱动机构、监测装置和俘能模块,前爪驱动机构连接并驱动龟前爪摆动,后爪驱动机构连接并驱动龟后爪摆动,鱼尾驱动机构连接并驱动龟尾摆动,监测装置包括摄像头、控制模块和电池包,前爪驱动机构、后爪驱动机构、鱼尾驱动机构均和控制模块电连接,电池包为前爪驱动机构、后爪驱动机构、鱼尾驱动机构和摄像头提供电能,龟本体通过绳索和锚连接在海底的海床上,俘能模块通过绳索将波浪能转换为电能储存在电池包中。
6.作为上述技术方案的进一步改进:
7.龟前爪的一端铰接在壳体内、另一端伸出壳体,前爪驱动机构包括电机一、短轴和中轴,短轴、中轴和龟前爪依次连接形成曲柄摇杆机构,电机一连接并驱动所述曲柄摇杆机构运动,使龟前爪摆动。
8.龟后爪一端位于壳体内、中部铰接在壳体内、另一端位于壳体外,后爪驱动机构包括位于壳体内的后爪驱动电机、凸轮和弹簧,弹簧的一端和壳体相对固定、另一端连接龟后爪的一端,后爪驱动电机连接并驱动凸轮转动,凸轮周期性地接触和推动龟后爪,使龟后爪压缩或者拉伸弹簧。
9.龟后爪设有两个,所述后爪驱动电机为双轴电机,双轴电机的两个驱动轴分别连接凸轮一和凸轮二,凸轮一和凸轮二转动时能分别接触和推动两个龟后爪的靠近弹簧的一
端,凸轮一和凸轮二不同时接触两个龟后爪。
10.龟尾一端位于壳体内、另一端位于壳体外,龟尾和壳体相对铰接,龟尾的位于壳体内的一端有轮齿,鱼尾驱动机构包括舵机和齿轮,舵机连接并驱动齿轮转动,齿轮和所述轮齿啮合。
11.俘能模块包括传动机构、电磁组件和线圈组件,电磁组件包括永磁体,线圈组件包括感应线圈,电磁组件和线圈组件间隔布置,线圈组件和壳体相对固定,绳索、传动机构和电磁组件依次连接并传递驱动。
12.传动机构包括至少一组螺杆齿轮传动机构和至少一组棘轮传动机构,绳索、螺杆齿轮传动机构、棘轮传动机构和电磁组件依次连接并传递驱动。
13.螺杆齿轮传动机构包括螺杆、传动齿轮一、轴承和套筒,套筒通过轴承安装在壳体内,传动齿轮一和套筒固定连接,螺杆穿过传动齿轮一并和传动齿轮一螺接,螺杆的下端和绳索连接。
14.电磁组件还包括棘轮,传动齿轮一、棘轮传动机构和棘轮依次啮合并传递驱动。
15.设有两组螺杆齿轮传动机构和两组棘轮传动机构,两组螺杆齿轮传动机构的两个螺杆的下端通过连接杆连接,连接杆和绳索连接,两组螺杆齿轮传动机构的两个传动齿轮一分别和两组棘轮传动机构啮合,两组棘轮传动机构同时和棘轮啮合。
16.本发明的有益效果是:利用波浪能量,给仿生海洋探测龟进行电力的供给,使所述探测龟实现自供能,不需要额外电力设备,波浪能量采集的效率高,能够适应海上的恶劣环境,无论是海平面产生波浪导致的螺杆上移还是归于平静导致的螺杆下移,都会产生机械运动,从而产生电能,提高了机电转换效率,所述探测龟结构新颖、简单、设计合理,通过海浪的拖拽作用,使采集系统内部机械传动结构运动,提高了采集系统的敏感性,吸收了波浪能,有效降低了探测龟的零部件损坏,提高了漂浮式设备的稳定性。
附图说明
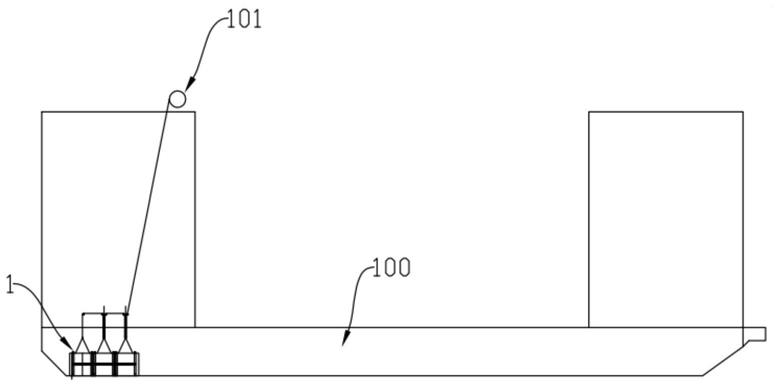
17.图1为本发明的结构示意图;
18.图2为本发明去除外壳、俘能模块和监测装置后的内部结构的俯视图;
19.图3为本发明去除外壳和俘能模块后的内部结构示意图;
20.图4为本发明去除外壳后内部结构的仰视图;
21.图5为本发明去除外壳后内部结构的俯视图;
22.图6为龟后爪和龟尾的局部放大示意图;
23.图7为本发明去除外壳后的内部结构示意图;
24.图8为本发明去除外壳和监测装置后的内部结构示意图;
25.图9为本发明俘能模块结构示意图;
26.图10为本发明的俘能模块爆炸图。
具体实施方式
27.以下结合附图对本发明的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本发明,并不用于限制本发明。
28.为了便于描述,在这里可以使用空间相对术语,如“在
……
之上”、“在
……
上方”、“在
……
上表面”、“上面的”等,用来描述如在图中所示的一个器件或特征与其他器件或特征的空间位置关系。应当理解的是,空间相对术语旨在包含除了器件在图中所描述的方位之外的在使用或操作中的不同方位。例如,如果附图中的器件被倒置,则描述为“在其他器件或构造上方”或“在其他器件或构造之上”的器件之后将被定位为“在其他器件或构造下方”或“在其他器件或构造之下”。因而,示例性术语“在
……
上方”可以包括“在
……
上方”和“在
……
下方”两种方位。该器件也可以其他不同方式定位(旋转90度或处于其他方位),并且对这里所使用的空间相对描述作出相应解释。
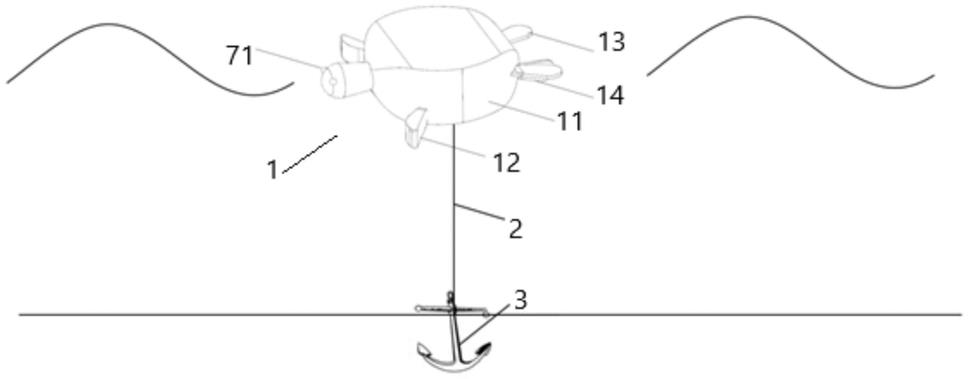
29.一种自供能漂浮式仿生海洋探测龟,如图1~10所示,包括龟本体1、绳索2和锚3,龟本体1包括壳体11和安装在壳体11上的龟前爪12、龟后爪13、龟尾14、前爪驱动机构、后爪驱动机构、鱼尾驱动机构、监测装置和俘能模块。龟前爪12设有两个,模拟龟的两个前爪,龟后爪13设有两个,模拟龟的两个后爪。前爪驱动机构用于驱动两个龟前爪12运动。后爪驱动机构用于驱动两个龟后爪13运动。鱼尾驱动机构用于驱动龟尾14。俘能模块用于产生电能,将洋流的波浪能转换为电能,为前爪驱动机构、后爪驱动机构、鱼尾驱动机构和监测装置提供电能。
30.壳体11模拟龟的头部和躯干。头部和壳体11具有内部容腔。头部和壳体11形成所述龟本体1的外壳,壳体11内设有支撑板112、盖板111和支撑架115,盖板111和支撑板112平行间隔布置,支撑板112和盖板111均与壳体11固定连接,盖板111位于支撑板112的上方。支撑板112为具有通孔的平板。
31.两个龟前爪12对称布置在壳体11上,龟前爪12的一端铰接在支撑板112上、另一端伸出壳体11。龟前爪12和所述头部位于所述壳体11的同一端,且所述头部位于两个龟前爪12之间。龟前爪12可相对壳体11围绕铰接点转动,两个龟前爪12在同一平面内摆动。
32.前爪驱动机构设有两组,两组前爪驱动机构分别连接并驱动两个龟前爪12摆动。前爪驱动机构包括电机一41、短轴42和中轴43。电机一41位于支撑板112的一侧,短轴42、中轴43和龟前爪12位于支撑板112的另一侧,电机一41较龟前爪12更靠近盖板111。电机一41的驱动轴穿过支撑板112后固定连接短轴42的一端,短轴42的另一端铰接中轴43的一端,中轴43的另一端铰接龟前爪12的中部。短轴42、中轴43和龟前爪12连接形成曲柄摇杆机构,电机一41启动后带动短轴42旋转,短轴42通过中轴43带动龟前爪12摆动。较佳的,两个龟前爪12在同一平面内摆动,模拟龟的两个前爪的动作。所述曲柄摇杆机构形成的动作模拟仿生游中蝶泳双臂划水运动。电机一41的驱动轴通过轴承安装在支撑板112上。
33.两个龟后爪13对称布置在所述壳体11上,龟后爪13和龟前爪12分别连接壳体11的两端。龟后爪13的中部铰接在支撑板112上。具体的,支撑板112上固定安装有一个三角支撑架114和轴三113,三角支撑架114位于两个龟后爪13之间,轴三113穿过三角支撑架114,轴三113的中部固定连接三角支撑架114,两个龟后爪13的中部分别套接在轴三113的两端,形成龟后爪13和轴三113的铰接。
34.后爪驱动机构包括双轴电机51、弹簧压板52、凸轮一54、凸轮二55和两个弹簧53。弹簧压板52和支撑板112间隔布置,弹簧压板52通过两根连杆和支撑板112固定连接。龟后爪13的一端位于弹簧压板52和支撑板112之间。两个龟后爪13分别通过两个弹簧53连接弹簧压板52,具体的,弹簧53的两端分别连接龟后爪13的一端和弹簧压板52,龟后爪13的另一端伸出壳体11。双轴电机51安装在支撑板112,双轴电机51的两个驱动轴分别连接凸轮一54
和凸轮二55。双轴电机51启动后,通过驱动轴带动凸轮一54和凸轮二55转动。凸轮一54和凸轮二55的位置设定为:凸轮一54和凸轮二55转动时,能分别接触和推动两个龟后爪13的靠近弹簧53的一端,使龟后爪13压缩或者拉伸弹簧53。每个凸轮周期性地接触和推动龟后爪13,且凸轮一54和凸轮二55不是对称地安装在双轴电机51的两侧,使凸轮一54和凸轮二55不是同时接触和推动两个龟后爪13,而是分别交替接触两个龟后爪13。基于上述结构,双轴电机51启动后,同时带动两个凸轮转动,凸轮接触并推动龟后爪13,使龟后爪13压缩或拉伸弹簧53,随着凸轮的继续转动,凸轮脱离与龟后爪13的接触,龟后爪13在拉伸弹簧53的作用下复位,如此反复,龟后爪13反复摆动。由于两个凸轮的不对称布置,两个凸轮分别接触两个龟后爪13的时间不同,使两个龟后爪13交替摆动。两个龟后爪13分别在两个平行的平面内摆动。需要说明的是,龟前爪12摆动所在的平面和龟后爪13摆动所在的平面彼此垂直。两个龟后爪13的动作模拟鸭子游动时鸭蹼交替拍打水的运动。
35.龟尾14和龟后爪13位于所述壳体11的同一端,为了布置的紧凑性,龟尾14和龟后爪13分别位于支撑板112的两侧,龟后爪13较龟尾14更靠近盖板111。龟尾14的中部通过铰接轴铰接在支撑板112上,龟尾14的一端设有轮齿、另一端伸出壳体11。所述铰接轴为轴四62。
36.鱼尾驱动机构包括舵机61和齿轮63。舵机61安装在支撑板112上,舵机61的驱动轴连接并带动齿轮63转动,齿轮63和龟尾14一端的轮齿啮合。舵机61启动后带动齿轮63转动,齿轮63通过与其啮合的轮齿带动龟尾14转动,龟尾14转动方向所在的平面和龟尾14摆动方向所在的平面垂直。龟尾14模仿鱼尾摆动,通过鱼尾的偏航控制方向。
37.龟本体1通过绳索2和锚3连接在海床上。
38.俘能模块包括传动机构、电磁组件和线圈组件。传动机构包括至少一组螺杆齿轮传动机构和至少一组棘轮传动机构。
39.螺杆齿轮传动机构包括螺杆8111、传动齿轮一8112、轴承8113和套筒8114。轴承8113安装在支撑板112上,具体的,轴承8113的外圈连接支撑板112,套筒8114连接轴承8113的内圈,传动齿轮一8112的一端面和套筒8114固定连接,传动齿轮一8112和套筒8114共中心轴,螺杆8111穿过传动齿轮一8112中心并和传动齿轮一8112螺接。由上可知,螺杆8111穿过传动齿轮一8112、套筒8114和轴承8113。当螺杆8111沿着其长度方向移动时,传动齿轮一8112被驱动自转,套筒8114被带动转动。较佳的,设有两组螺杆齿轮传动机构,两组螺杆齿轮传动机构的两个螺杆8111平行间隔布置,两组螺杆齿轮传动机构的两个螺杆8111的上端通过连接杆813连接、两个螺杆8111的下端也通过一个连接杆813连接。绳索2的一端连接位于下端的连接杆813,绳索2的另一端连接锚3,锚3插入海床。
40.棘轮传动机构包括升频齿轮8121、轴二8123和多个棘爪8122。轴二8123为圆柱体,升频齿轮8121的一端面和轴二8123的一端面固定连接,且升频齿轮8121和轴二8123共中心轴,升频齿轮8121和轴二8123的中心轴可转动地安装在盖板111上。多个棘爪8122均匀间隔布置在轴二8123的圆周面上。较佳的,设有两组棘轮传动机构,两组棘轮传动机构位于两组螺杆齿轮传动机构之间,且两组棘轮传动机构的两个升频齿轮8121分别和两组螺杆齿轮传动机构的两个传动齿轮一8112啮合。
41.电磁组件包括棘轮821、法兰盘822、电磁盘823和多个永磁体。棘轮821和棘爪8122啮合,棘轮821、法兰盘822和电磁盘823依次连接,棘轮821一端面和法兰盘822的一端面固
定连接,法兰盘822的另一端面和电磁盘823的一端面固定连接,且棘轮821、法兰盘822和电磁盘823共中心轴,棘轮821、法兰盘822和电磁盘823的中心轴为轴一825,轴一825可转动地安装在盖板111上。棘轮821位于两个升频齿轮8121之间,且棘轮821和两个升频齿轮8121啮合。多个永磁体均匀间隔布置在电磁盘823上。
42.线圈组件包括线圈盘831和感应线圈,线圈盘831和电磁盘823间隔布置,线圈盘831固定安装在壳体11内,感应线圈布置在线圈盘831中。线圈盘831和盖板111通过支撑架115连接。较佳的,线圈盘831和盖板111分别位于支撑板112的两侧。
43.本实施例中,永磁体设有六个,对应的,感应线圈设有六个,六个感应线圈依次串联。
44.监测装置包括摄像头71、控制模块72和电池包73。摄像头71安装在所述头部内。控制模块72和电池包73安装在盖板111上,较佳的,控制模块72和电池包73位于盖板111的一侧、俘能模块位于盖板111的另一侧。电池包73为摄像头71、控制模块72和各个电机提供电能,摄像头71用于拍摄图片和视频,为探测海洋环境提供重要依据,摄像头71和各个电机均和控制模块72电连接,控制模块72主要负责接受指令和发射指令,控制模块72和上位机电连接。工作人员可以通过上位机远程输入指令给控制模块72,控制模块72收到指令后控制各个电机的启停。
45.基于上述结构,俘能模块产生电能的工作原理为:所述探测龟布置在海底时,锚3插入海床,绳索2的一端连接锚3、另一端连接所述壳体11内的传动机构的连接件,使所述龟本体1漂浮在海水中。当波浪冲击所述壳体11时,所述龟本体1发生移动,绳索2会对与其连接的连接件产生拉力,两个螺杆8111被带动向下运动,螺杆8111驱动与其螺接的传动齿轮一8112自转,传动齿轮一8112驱动与其啮合的升频齿轮8121转动,升频齿轮8121带动棘爪8122转动,棘爪8122带动与啮合的棘轮821转动,棘轮821带动与其连接的电磁盘823和电磁盘823上的永磁体转动,永磁体相对感应线圈转动,使感应线圈产生电能,产生的电能储存在电池包73中。当海浪退去,绳索2呈松弛状态,由于浮力的作用螺杆8111将会上移,恢复最初的位置。
46.需要说明的是,传动齿轮一8112、升频齿轮8121的转向设置为两个棘爪8122同时驱动棘轮821朝同一方向转动。通过升频齿轮8121的设置,提高了最终电磁盘31的转速,提高了电能的转化率。
47.另外,壳体11需要密封,以防止外部海水进入壳体11内部损坏零部件。为了实现密封效果,龟前爪12、龟后爪13和龟尾14与所述壳体11之间通过防水软布连接,类似汽车换挡杆上的防尘挡杆套。所述防水软布为锥桶形,所述防水软布的内圈连接龟前爪12、龟后爪13或龟尾14,外圈连接壳体11。如此,防水软布不影响龟前爪12、龟后爪13和龟尾14的动作的同时能密封它们与壳体11之间的缝隙,防止海水通过缝隙进入壳体11内。
48.所述探测龟运动模式开启时,探测龟可以通过两个龟前爪12和两个龟后爪13的摆动进行游动,通过龟尾14的偏航进行控制方向,以使摄像头71对不同方向进行探测。摄像头71监测的画面可以进行远距离的传输。
49.最后有必要在此说明的是:以上实施例只用于对本发明的技术方案作进一步详细地说明,不能理解为对本发明保护范围的限制,本领域的技术人员根据本发明的上述内容作出的一些非本质的改进和调整均属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。