1.本发明涉及一种一种轻便的二自由度飞行姿态控制实验台,属于自动控制教学实验技术领域。
背景技术:
2.本实验装置是为《自动控制原理》、《航空发动机控制理论》、《数字控制系统》等本科及研究生课程的教学实验环节所配套开发的被控对象,而上述课程是各高校自动化、控制工程及相关专业的重要专业基础课程。作为这些专业的基石类课程,理论学习固然重要,但相应的实验环节也对习得知识的融会贯通起着不可或缺的作用。
3.在控制类课程的教学实验中,所用最多的被控对象是各种电机与舵机。这类设备胜在功能精简、效果可靠,但被控量单一,对于高校学生越来越高的知识、技术水平来说其控制系统的设计过于简单,经过多年的使用,这一类设备在课堂实验环节上已经略显单薄。
4.同时,对于航空航天类专业的控制类课程来说,只有一般的实验器材是不够的,实验中的被控对象最好还要能够加深学生对于姿态控制的理解,这是市面现有的实验仪器所欠缺的。
5.公开号为cn111540259a的专利公开了一种包括上位机、实验箱本体和包括至少一个被控对象插件的自动控制实验设备。该实验设备的可以将多个被控对象通过扩展插头连接到实验箱上,拥有一定的灵活性、控制效果直观的优点。但同时,这些被控对象的功能单一,仍然是传统的电机、led等,只有一个被控量,不能体现出多变量耦合情况下的控制。
6.授权公告号为cn106502162b的专利公开了一种被控对象为机械臂的实验教学装置。其被控对象为机械臂与直流电机相嵌套组合,用于产生角度位置信号,并将信号返回给控制器。该实验设备的被控对象具有很好的创新性,将现代工业中常见的机械臂融入了实验教学环节。对于航空航天类专业来说,应当也有与专业结合紧密的被控对象,模拟如螺旋桨转速、位置姿态的控制量。
7.基于以上几点所述,目前市面上对应于自动控制实验教学的被控对象种类是有所欠缺的。
技术实现要素:
8.本发明的目的是提供一种用于《自动控制原理》、《数字控制系统》等控制类课程及《航空发动机控制理论》等航空航天专业的控制类课程教学实验中的被控对象,拥有两个控制量(电机的输入电压),驱动两个微型螺旋桨旋转以控制杆的两个自由度(两杆的俯仰与滚转角度),从而模拟飞机在实际飞行中的姿态控制。试验台的加速度传感器电路与接口模块、电机驱动电路直接集成在两个微型螺旋桨所在的横滚杆上,方便传感器的测量,同时也使整个装置更为轻巧便携。实际实验教学中,可以仅在上位机程序设计中用一个pid环节控制单一自由度,也可以设计较复杂的算法,对两个自由度实现复合控制,实现控制系统循序渐进的设计。
9.本发明的技术方案如下:
10.一种具有二自由度的姿态控制实验台,其特征在于:两个输入电压独立的微型螺旋桨、集成在螺旋桨所在横滚杆上的传感器电路、接口模块和电机驱动模块、固定于台架上俯仰角可变的俯仰杆、固定于俯仰杆一端的滚转角可变的横滚杆、横滚杆基于印刷电路板工艺制作,既是姿态控制结构组成部分又是电路板本身。
11.所述的两个微型螺旋桨分别对应一个集成在横滚杆上的电机驱动电路,驱动螺旋桨电机的电压范围均为0~5v,对应电机转速从最低至最高的范围;两个电机的输入电压升高、降低对应横滚杆整体的抬高和下落,即改变俯仰杆的俯仰角;两个电机的输入电压不同引起转速不同,升力差引起横滚杆两端高度产生差异,即改变横滚杆的滚转角。
12.所述的电机驱动电路包含一个电压跟随器电路用以增加驱动能力,其信号输入来自接口模块的电压输出引脚,经过调理后传递给三极管最后将电压输出给螺旋桨电机,从而带动微型螺旋桨旋转。每个驱动电路末端有一个专用接头,用于接入螺旋桨电机。
13.所述的传感器电路包括一块满量程加速度测量范围足够覆盖姿态控制结构运动加速度的加速度计;加速度计在垂直方向上的初始加速度为1,即当此传感器水平放置时,x、y轴方向的加速度为0,z轴为1。传感器电路位置在横滚杆的几何中心,以准确测量三个空间方向的加速度。
14.所述的横滚杆两端为两个对称安装的微型螺旋桨及其对应的电机驱动模块,几何中心为加速度传感器电路与接口模块。接口模块对应一个插座,连接至控制器。设备整体工作流程为上位机给出实验台的俯仰与滚转角度指令,指令转化为电压信号后通过接口模块输入给两个微型螺旋桨,螺旋桨改变升力使加速度传感器测量值发生变化,并将反馈量通过接口模块返回给控制器。
15.所述的俯仰杆中部与台架底座相连接,一端连接横滚杆,另一端连接配重块。实验台为二自由度系统,俯仰杆和横滚杆可同时活动,两螺旋桨转速变化会同时影响俯仰角和滚转角。两微型螺旋桨旋转在俯仰杆一侧产生的升力改变俯仰杆力矩,带动俯仰杆转动使俯仰角产生变化,两螺旋桨转速不同产生的力矩差使横滚杆发生转动,滚转角产生变化。俯仰杆可使用由一固定孔水平地固定在台架上,使实验台变为单自由度系统,两螺旋桨转速改变仅引起滚转角变化。
16.有益效果:
17.本发明模拟飞机在飞行中的姿态控制过程,采用一种二自由度的设计实现自动控制实验中控制效果的改变,由此可以在实验教学环节针对两个耦合自由度的控制设计更复杂的多变量控制系统,也可以在机械上固定一个自由度,提供单输出的研究对象;采用了传感器、接口模块、驱动模块等电路结构与能够在两个自由度上活动的机械结构一体化的设计,由此使得此被控对象更为轻巧灵活,易于使用。
附图说明
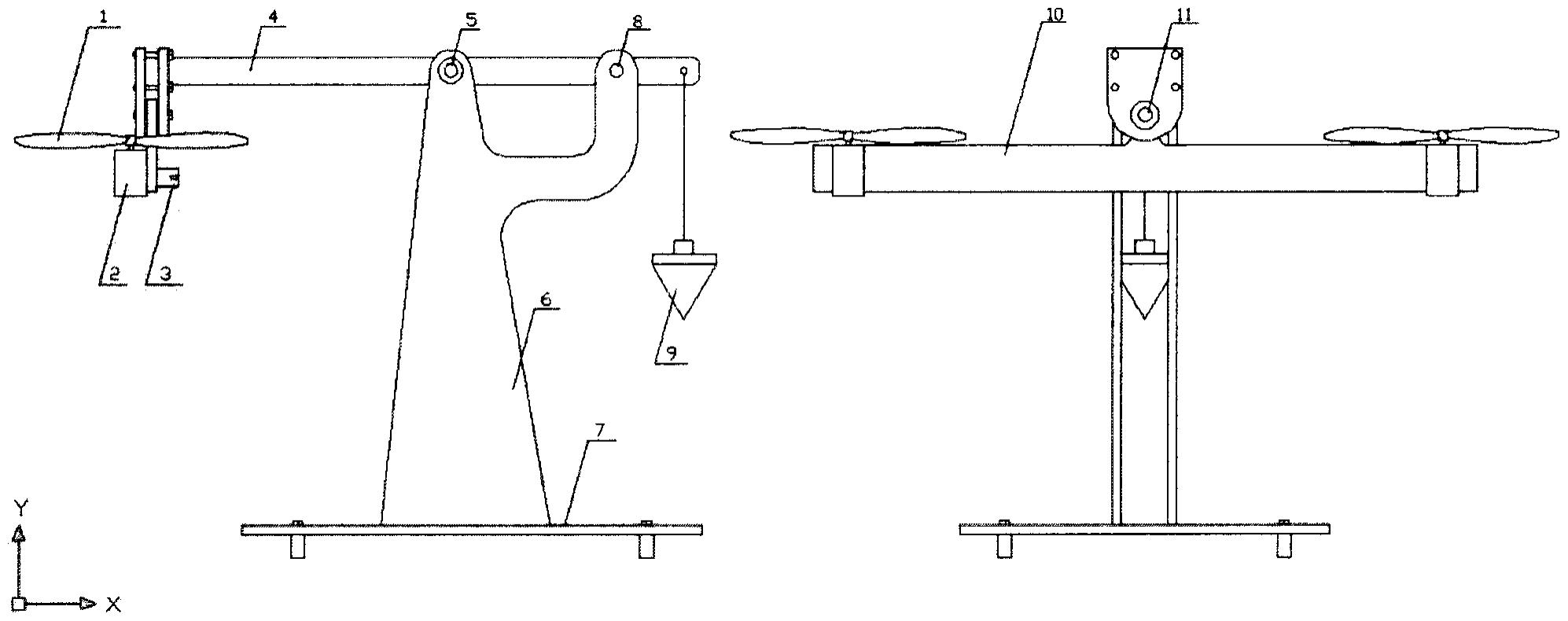
18.附图1为本发明二自由度姿态控制实验台的结构示意图;
19.其中,附图标记为:1微型螺旋桨,2螺旋桨电机,3接口插座,4俯仰杆,5俯仰杆与台架固定轴,6台架,7底座,8俯仰角固定孔,9配重块,10横滚杆,11横滚杆与俯仰杆固定轴。
20.附图2为本实验台的左视图;
21.附图3为本实验台的正视图;
22.附图4为本实验台的工作方框图;
23.附图5为电源及接口模块电路框图;
24.附图6为驱动电路框图;
具体实施方式
25.下面结合附图和具体实施例对本发明技术方案做进一步解释说明。
26.实施例1
27.一种具有二自由度的姿态控制实验台,其特征在于:两个输入电压独立的微型螺旋桨(1)、直接集成在螺旋桨所在横滚杆(10)上的传感器电路、接口模块和电机驱动模块、固定于台架(6、7)上俯仰角可变的俯仰杆(4)、固定于俯仰杆一端的滚转角可变的横滚杆。
28.所述的两个微型螺旋桨(1)分别对应一个集成在横滚杆上的电机驱动电路,驱动螺旋桨电机(2)的电压范围均为0~5v,对应电机转速从最低至最高的范围;两个电机的输入电压升高、降低对应横滚杆(10)整体的抬高和下落,即改变俯仰杆(4)的俯仰角;两个电机的输入电压不同引起转速不同,升力差引起横滚杆两端高度产生差异,即改变横滚杆的滚转角。
29.接入上位机后,通过上位机程序给出控制螺旋桨转速所需的电压值。电压的控制有开环和闭环两种方式;开环控制时,电压值直接通过指令给出:
30.vi=v
cmd,i
(i=1,2)
31.闭环控制时,在上位机中给出目标俯仰角及滚转角,程序通过目标俯仰角、滚转角与传感器测得的实际俯仰角、滚转角的差值进行pid控制,并得出电压值改变螺旋桨转速,被传感器测量后反馈给上位机进行下一轮pid控制:
32.首先对输入进行滤波处理,并获得实际值与目标值之间的差值:
33.θ
roll,cmd
=0.95*θ
roll,cmd
0.05*θ
roll,input
34.θ
pitch,cmd
=0.95*θ
pitch,cmd
0.05*θ
pitch,input
35.δ
roll
=θ
roll,cmd-θ
roll
36.δ
pitch
=θ
pitch,cmd-θ
pitch
37.计算比例、积分、微分项,得到控制量:
38.u(k)
roll
=kp1*δ(k)
roll
ki1*∑δ(k)
roll
kd1*(δ(k)
roll-δ(k-1)
roll
)/dt
39.u(k)
pitch
=kp1*δ(k)
pitch
ki1*∑δ(k)
pitch
kd1*(δ(k)
pitch-δ(k-1)
pitch
)/dt
40.最后,同样由一阶惯性环节得到两个电机的电压量:
41.v1=0.5*v1 0.5*(c u(k)
roll
u(k)
pitch
)
42.v2=0.5*v2 0.5*(c-u(k)
roll
u(k)
pitch
)
43.其中,kp1、ki1、kd1分别为比例常数、积分常数、微分常数;dt为时间步长。
44.所述的电机驱动电路(图6)包括一个跟随器电路以增加驱动能力。其信号输入来自接口模块的ao0、ao1引脚,经过调理后将电压输出给螺旋桨电机(2),从而带动微型螺旋桨(1)旋转。每个驱动电路末端有一个专用接头,用于接入螺旋桨电机。
45.所述的传感器电路包括一块满量程加速度测量范围足够覆盖姿态控制结构运动加速度的加速度计,接收3.3v标准电压;加速度计在垂直方向上的初始加速度为1,即当此
传感器水平放置时,x、y轴方向的加速度为0,z轴为1。传感器电路位置在横滚杆(10)几何中心,以准确测量三个空间方向的加速度,其输出信号为模拟电压xi、yi、zi,其中xi与yi并联,yi与zi并联,并输出给接口模块的ai0、ai1引脚。
46.所述的横滚杆(10)两端对称地安装有两个微型螺旋桨(1)及其对应的电机驱动模块,几何中心为加速度传感器电路与接口及电源模块。接口模块对应一个插座(3),连接至控制器;外部电源输入通过隔离及滤波和线性稳压电路输出给电机驱动电路和传感器电路。设备整体工作流程为上位机给出实验台的俯仰与滚转角度指令,指令转化为电压信号后通过接口模块ao0、ao1引脚输入给两个微型螺旋桨,螺旋桨改变升力使加速度传感器测量值发生变化,通过ai0、ai1引脚输出给接口模块并返回给上位机。
47.所述的俯仰杆(4)中部与台架底座(6、7)相连接,一端连接横滚杆(10),另一端连接配重块(9)。两微型螺旋桨(1)旋转在俯仰杆一侧产生的升力改变俯仰杆力矩,带动俯仰杆转动使俯仰角产生变化,两螺旋桨转速不同产生的力矩差使横滚杆发生转动,滚转角产生变化;俯仰杆可使用螺栓穿过固定孔(8)水平地固定在台架上,使实验台变为单自由度系统,两螺旋桨转速改变仅引起滚转角变化。
48.本例在添加配重块且不固定俯仰自由度的情况下,根据两电机输入电压大小的不同,俯仰角最大为50
°
左右,最小为-20
°
左右;根据两电机输入电压差值的不同,滚转角可达
±
90
°
。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。