1.本发明属于机器人仿真技术领域,具体涉及一种面向虚幻引擎的仿真无人机飞行控制方法。
背景技术:
2.机器人仿真是计算机仿真的重要研究领域,指的是使用计算机对实际的机器人行为动作进行模拟的技术,通过对机器人运动学、动力学、导航制导与控制、环境感知、智能算法等进行仿真计算,模拟机器人的实际运行过程,如无人机无人车的自动驾驶等。使用机器人仿真技术,在构建的与现实世界类似的虚拟仿真场景中支持机器人进行行动与交互,对机器人的物理特性、运动仿真模型、传感器仿真模型等进行建模,从而实现对机器人模型、设计、算法的快速验证。由于能够逼近物理实际,使得开发的程序通过简单的修改甚至无需修改即可应用于实体机器人的控制等,机器人仿真可以大大降低研究成本、缩减研究周期,是设计开发机器人及其相关算法或技术的重要工具和有效手段。
3.目前应用范围广泛的机器人仿真平台有gazebo、webots、airsim、carla等。其中airsim、carla使用了成熟游戏引擎——虚幻引擎4,是微软、谷歌等公司对无人机器人模型构建和算法验证的测试平台。虚幻引擎是顶级的成熟仿真引擎,在物理仿真上,虚幻引擎4采用了physx物理运算引擎,使得在虚拟世界中的物体能够符合真实世界的物理运动规律,使得内部模型的运动更加具有真实感。在图形处理方面,其支持微软开发的directx图形渲染功能,比如场景中的光源展示、模型表面的物理属性的材质和着色渲染等,使得整个世界内的物体更加生动和绚丽。在模型制作方面,虚幻引擎4具备多种基础模型,如圆柱体、球体、正方体等,能够给用户自己制作完整模型,如果追求更加精细的模型,也能够导入3d max等软件制作的模型。在用户界面方面,其具有丰富的图形化界面组件,供用户进行二次开发。除机器人仿真平台外,虚幻引擎还用于建筑、汽车与运输、影视、训练与模拟等行业应用。
4.目前在虚幻引擎上开发的飞机机动模型,大部分仍采用强制位移的方式进行,无法体现真实的飞机机动过程。而对于复杂的六自由度仿真飞机模型而言,则缺乏能够自动控制飞机飞行的算法,使用强化学习等方法学习出的模型,不具备可移植性和实用性,且真实性较差。综上,对于机器人仿真行业,急需一种面向虚幻引擎的仿真无人机飞行控制方法。
技术实现要素:
5.(一)要解决的技术问题
6.本发明提出一种面向虚幻引擎的仿真无人机飞行控制方法,以解决如何实现无人机稳定真实的飞行控制的技术问题。
7.(二)技术方案
8.为了解决上述技术问题,本发明提出一种面向虚幻引擎的仿真无人机飞行控制方
法,该仿真无人机飞行控制方法包括如下步骤:
9.s1、无人机模型形式化表示
10.在虚幻引擎中构建仿真无人机模型,无人机模型形式化表示为:f=《p,r,v,i,t》;其中,p为无人机位置,是无人机模型在虚幻引擎中左手坐标系下对应的绝对坐标位置信息;r为无人机的姿态角,是无人机模型在虚幻引擎中相对坐标系下对应的俯仰角、滚转角、偏航角;v为无人机的速度矢量,是无人机模型在虚幻引擎中根据两次移动距离计算出的无人机速度;i为无人机参数信息,包括无人机的编号、名称、类型、目的地;t为无人机的受力情况,包括无人机每时刻的所受合力、在俯仰角、滚转角、偏航角方向上的扭矩;
11.s2、无人机机动外部控制
12.构建仿真无人机外部控制接口,控制方式包括位点控制和速度控制;其中,位点控制为输入目标位置,无人机向目标位置移动;速度控制为通过计算目标位置与当前位置,根据无人机的最大飞行速度与巡航速度,计算出无人机的速度矢量,无人机以该速度矢量机动飞行;
13.s3、使用pid增益计算方法对无人机进行飞行控制
14.将无人机的飞行视为闭环系统,使用pid增益计算方法对无人机的受力和扭矩进行计算,实现飞行控制。
15.进一步地,步骤s1中,仿真飞机模型采用静态网格体,由机身、前起落架、后起落架、三光吊舱、底鳍、螺旋桨、左侧翼和右侧翼共八个组件组成。
16.进一步地,步骤s2中,将仿真无人机视为一个由多组件构成的刚体,在每一个仿真时刻对刚体的受力及扭矩进行计算,并使用physx物理引擎进行物理解算,得到下一时刻仿真环境中无人机的三维位置以及俯仰角、滚转角、偏航角姿态信息并进行更新。
17.(三)有益效果
18.本发明提出一种面向虚幻引擎的仿真无人机飞行控制方法,包括无人机模型形式化表示、无人机机动外部控制和使用pid增益计算方法对无人机进行飞行控制。本发明在仿真风场环境下,将pid技术运用于对无人机的机动方向、机动速度进行控制,通过使用积分运算,解算出每个时刻的误差值,从而实现无人机稳定真实的飞行控制。本方法提供基于速度矢量或位点的两种控制方式,与真实无人机控制方式一致,且飞行更加稳定真实;采用力学计算作为飞行受力基础,可以增加额外的受力情况,具有良好的迁移性。
附图说明
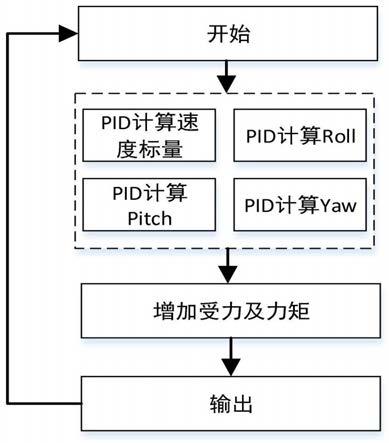
19.图1为本发明实施例中pid计算受力及力矩流程图。
具体实施方式
20.为使本发明的目的、内容和优点更加清楚,下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。
21.本实施例提出一种面向虚幻引擎的仿真无人机飞行控制方法,该方法包括如下步骤:
22.s1、无人机模型形式化表示
23.在虚幻引擎中构建仿真无人机模型,该模型采用静态网格体,由机身、前起落架、
后起落架、三光吊舱、底鳍、螺旋桨、左侧翼和右侧翼共八个组件组成。
24.无人机模型形式化表示为:f=《p,r,v,i,t》,包括位置、姿态角、速度矢量、参数信息以及机动参数。
25.p为无人机位置position,是无人机模型在虚幻引擎中左手坐标系下对应的绝对坐标位置信息,由(x,y,z)三维数组构成。本实施例中,三维坐标的范围均为-100km~100km。
26.x∈(-1
×
106,1
×
106),y∈(-1
×
106,1
×
106),z∈(-1
×
106,1
×
106)
27.r为无人机的姿态角rotation,是无人机模型在虚幻引擎中相对坐标系下对应的俯仰、滚转、偏航角,由(roll,pitch,yaw)三维数组构成,三个角度的范围均为-90
°
~90
°
。
28.roll∈(-90
°
,90
°
),pitch∈(-90
°
,90
°
),yaw∈(-90
°
,90
°
)
29.v为无人机的速度矢量velocity,是无人机模型在虚幻引擎中根据两次移动距离计算出的无人机速度,由(vx,vy,vz)构成。
30.i为无人机参数信息information,包括无人机的编号、名称、类型、目的地,是一个(id,name,type,destination)四维数组。
31.i=<id,name,type,destination>
32.t为无人机的受力情况,包括无人机每时刻的所受合力current_force、在俯仰角方向上的扭矩current_torque_pitch、在滚转角方向上的扭矩current_torque_roll、在偏航角方向上的扭矩current_torque_yaw。
33.t=<current_force,current_torque_roll,current_torque_pitch,current_torque_yaw>
34.s2、无人机机动外部控制
35.构建仿真无人机外部控制接口,控制方式包括位点控制和速度控制。位点控制,即输入目标位置,无人机向目标位置移动;速度控制,即通过计算目标位置与当前位置,根据无人机的最大飞行速度与巡航速度,计算出无人机的速度矢量,无人机以该速度矢量机动飞行。
36.在进行飞行控制的过程中,将仿真无人机视为一个由多组件构成的刚体,在每一个仿真时刻对刚体的受力及扭矩进行计算,并使用physx物理引擎进行物理解算,从而得到下一时刻仿真环境中无人机的三维位置以及俯仰角、滚转角、偏航角姿态信息并进行更新。
37.s3、使用pid增益计算方法对无人机进行飞行控制
38.将无人机的飞行视为一个闭环系统,而其中的关键作用因素包括受力和扭矩。使用pid增益计算方法对无人机的受力和扭矩进行计算,可以实现稳定快速响应的飞行控制。
39.步骤s2中使用两种控制方式时都涉及到从当前位置(速度)转换到目标位置(速度)的加(减)速过程及转向过程。其中,扭矩可以分解俯仰、滚转、偏航三个方向,使用三维向量表示。基于每个方向前一时刻力进行计算,通过进行pid计算,得到下一时刻在该方向的力。力的标量同样使用pid增益计算方法进行计算,在每个时刻,输入当前的速度以及目标速度,通过pid控制对力的大小标量进行计算。具体计算流程如图1所示。
40.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
