技术特征:
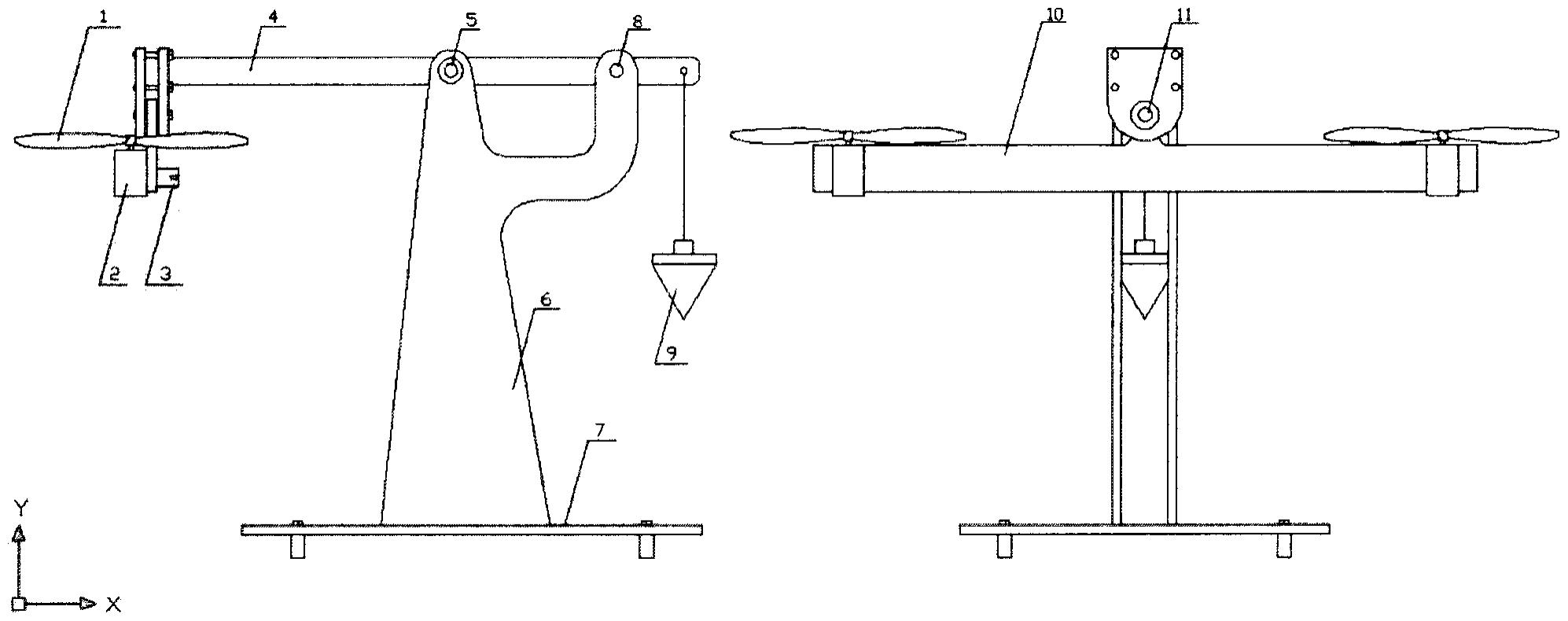
1.一种轻便的二自由度飞行姿态控制实验台,由底座、立柱、俯仰杆、横滚杆、2个螺旋桨、姿态传感器、连接电缆及控制器组成。其特征在于:两个微型螺旋桨(1)对称地安装在横滚杆(10)两端,由两个对应的电机驱动电路独立驱动;横滚杆由印刷电路板工艺制作,既是姿态控制结构的组成部分又是电路板本身,其上集成了传感器电路、电机驱动电路和接口电路;传感器电路用于角度测量,接口电路用于接收控制器指令及返回信号;实验台具有两个自由度,俯仰杆(4)中轴固定于台架(6、7)上使俯仰角可变,横滚杆中轴固定于俯仰杆一端使滚转角可变,俯仰角和滚转角由两螺旋桨电机的输入电压决定;俯仰杆可由螺栓在固定孔(8)处水平固定,变为单自由度系统,使两螺旋桨电机的输入电压只影响滚转角。2.根据权利要求1所述的二自由度姿态控制实验台,其特征在于:基于印刷电路板工艺集成在横滚杆上的两个电机驱动电路互相独立地控制对应的两个螺旋桨电机(2);电机驱动电路的信号输入来自于接口模块接收的控制器指令,经过调理后将电压输出给螺旋桨电机(2),从而带动微型螺旋桨(1)旋转。每个驱动电路末端有一个用于接入螺旋桨电机的专用接头。3.根据权利要求1所述的二自由度姿态控制实验台,其特征在于:基于印刷电路板工艺集成在横滚杆上的传感器电路用于测量俯仰角和横滚角;包括一块满量程加速度测量范围能够覆盖横滚杆移动状态的加速度计,加速度信号通过换算后转化为角度信号;传感器电路位置在横滚杆(10)几何中心,以准确测量三个空间方向的加速度;最终输出给接口模块并传递给控制器。4.根据权利要求1所述的二自由度姿态控制实验台,其特征在于:基于印刷电路板工艺集成在横滚杆(10)中部的接口模块负责与上位机间的信号传输。接口模块对应一个插座(3),连接至控制器。设备整体工作流程为上位机给出实验台的俯仰与滚转角度指令,指令转化为电压信号后通过接口模块输入给两个微型螺旋桨,螺旋桨改变升力使加速度传感器测量值发生变化,并将反馈量通过接口模块返回给控制器。5.根据权利要求1所述的二自由度姿态控制实验台,其特征在于:俯仰杆(4)中部与台架底座(6、7)相连接,一端连接横滚杆(10),另一端连接配重块(9)。俯仰杆中轴一侧和台架上对应位置均有一固定孔,可插入螺栓使俯仰杆水平固定。俯仰杆不固定时为二自由度系统,两微型螺旋桨(1)旋转在俯仰杆一侧产生的升力改变俯仰杆力矩,带动俯仰杆转动使俯仰角产生变化,两螺旋桨转速不同产生的力矩差使横滚杆发生转动,滚转角产生变化;俯仰杆固定时为单自由度系统,两螺旋桨转速不同仅使滚转角产生变化。
技术总结
本发明公开了一种轻便的二自由度飞行姿态控制实验台,它主要由底座、立柱、俯仰杆、横滚杆、2个电动螺旋桨、姿态传感器、连接电缆及控制器等组成,其中,俯仰杆通过轴承与立柱连接构成俯仰关节,横滚杆通过轴承与俯仰杆连接构成横滚关节;横滚杆是基于印刷电路板工艺实现的,既是姿态控制结构的组成部分又是电路板本身,其上有传感器电路、电机驱动电路和接口电路,两端安装有2个电动螺旋桨。通过分别控制2个电动螺旋桨的转速,可以实现俯仰、横滚姿态的控制,实现飞机飞行姿态的二自由度模拟。实验台具有轻便、灵巧、低成本等特点,可配置为单自由度单变量控制系统或二自由度双变量控制系统,可用于《自动控制原理》、《数字控制系统》及《飞行控制》等控制类课程教学实验。及《飞行控制》等控制类课程教学实验。及《飞行控制》等控制类课程教学实验。
技术研发人员:李明洲 黄向华 张天宏
受保护的技术使用者:南京航空航天大学
技术研发日:2021.11.17
技术公布日:2022/2/18
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。