1.本公开涉及车辆技术领域,具体地,涉及一种控制车辆制动的方法、装置和车辆。
背景技术:
2.随着生活水平的不断提高,车辆已成为出行必不可少的交通工具,车辆安全性能是体现整车性能的主要指标之一,而车辆制动系统的性能是体现车辆安全性能的重要部分。
3.目前的车辆制动系统,需要驾驶员通过踩踏制动踏板以实施有效的制动行为,从而避免车辆碰撞事故发生,然而,对以往众多交通事故的原因进行统计分析后,得到大多数事故中,在车辆发生碰撞事故之前,驾驶员都因为过分紧张,而肢体僵硬,而无法实施有效的踩踏制动踏板行为,进而导致了制动失败,造成了车辆碰撞事故。
技术实现要素:
4.本公开的目的是提供一种控制车辆制动的方法、装置和车辆。
5.为了实现上述目的,在本公开的第一方面提供一种控制车辆制动的方法,所述方法包括:
6.获取车辆当前的行驶速度;
7.确定所述行驶速度对应的目标力度阈值;
8.获取驾驶员当前手握方向盘的第一握持力度;
9.在确定所述第一握持力度大于或者等于所述目标力度阈值的情况下,控制所述车辆制动。
10.可选地,所述确定所述行驶速度对应的目标力度阈值包括:
11.从多个预设速度区间中确定所述行驶速度所在的目标速度区间;
12.通过预先生成的压力对应关系,确定所述目标速度区间对应的压力阈值,所述压力对应关系包括所述预设速度区间与压力阈值的对应关系;
13.将所述目标速度区间对应的压力阈值,作为所述目标力度阈值。
14.可选地,所述压力对应关系通过以下方法预先生成:
15.在所述驾驶员驾驶所述车辆起步时,获取所述驾驶员在预设时间段内握持所述方向盘的最大握持力度,所述预设时间段为以所述车辆起步时刻为起始时刻,按照预设时长确定的时间段;
16.获取每个所述预设速度区间对应的预设阈值系数;
17.根据所述最大握持力度和所述预设阈值系数确定每个预设速度区间对应的压力阈值,以生成所述压力对应关系。
18.可选地,所述根据所述最大握持力度和所述预设调整系数确定每个预设速度区间对应的压力阈值包括:
19.将每个所述预设速度区间对应的预设阈值系数与所述最大握持力度的乘积作为
该预设速度区间对应的压力阈值。
20.可选地,所述方法还包括:
21.在生成所述压力对应关系的过程中,若所述驾驶员当前握持所述方向盘的第二握持力度大于或者等于指定力度阈值,则控制所述车辆制动。
22.在本公开的第二方面提供一种控制车辆制动的装置,所述装置包括:
23.第一获取模块,用于获取车辆当前的行驶速度;
24.第一确定模块,用于确定所述行驶速度对应的目标力度阈值;
25.第二获取模块,用于获取驾驶员当前手握方向盘的第一握持力度;
26.第二确定模块,用于在确定所述第一握持力度大于或者等于所述目标力度阈值的情况下,控制所述车辆制动。
27.可选地,所述第一确定模块包括:
28.第一确定子模块,用于从多个预设速度区间中确定所述行驶速度所在的目标速度区间;
29.第二确定子模块,用于通过预先生成的压力对应关系,确定所述目标速度区间对应的压力阈值,所述压力对应关系包括所述预设速度区间与压力阈值的对应关系;
30.第三确定子模块,用于将所述目标速度区间对应的压力阈值,作为所述目标力度阈值。
31.可选地,所述装置还包括:
32.关系生成模块,用于在所述驾驶员驾驶所述车辆起步时,获取所述驾驶员在预设时间段内握持所述方向盘的最大握持力度,所述预设时间段为以所述车辆起步时刻为起始时刻,按照预设时长确定的时间段;获取每个所述预设速度区间对应的预设阈值系数;根据所述最大握持力度和所述预设阈值系数确定每个预设速度区间对应的压力阈值,以生成所述压力对应关系。
33.可选地,所述关系生成模块用于:
34.将每个所述预设速度区间对应的预设阈值系数与所述最大握持力度的乘积作为该预设速度区间对应的压力阈值。
35.可选地,所述装置还包括:
36.第三确定模块,用于在生成所述压力对应关系的过程中,若所述驾驶员当前握持所述方向盘的第二握持力度大于或者等于指定力度阈值,则控制所述车辆制动。
37.在本公开的第三方面提供一种车辆,所述车辆包括以上第二方面所述的控制车辆制动的装置。
38.上述技术方案,通过获取车辆当前的行驶速度;确定所述行驶速度对应的目标力度阈值;获取驾驶员当前手握方向盘的第一握持力度;在确定所述第一握持力度大于或者等于所述目标力度阈值的情况下,控制所述车辆制动。这样,根据车辆的行驶速度与驾驶员当前手握方向盘的第一握持力度控制车辆制动,能够有效避免驾驶员因为情绪紧张而肢体僵硬,无法实施踩踏制动踏板行为的问题,能够有效提高车辆制动系统的可靠性,也有利于提升整车的安全性能。
39.本公开的其他特征和优点将在随后的具体实施方式部分予以详细说明。
附图说明
40.附图是用来提供对本公开的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本公开,但并不构成对本公开的限制。在附图中:
41.图1是本公开一示例性实施例示出的一种控制车辆制动的方法的流程图;
42.图2是本公开另一示例性实施例示出的一种控制车辆制动的方法的流程图;
43.图3是本公开又一示例性实施例示出的一种控制车辆制动的装置的框图;
44.图4是根据图3所示实施例示出的一种控制车辆制动的装置的框图。
具体实施方式
45.以下结合附图对本公开的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本公开,并不用于限制本公开。
46.在详细介绍本公开的具体实施方式之前,首先对本公开的应用场景进行以下说明,本公开可以应用于车辆的制动过程中,该车辆中可以包括车辆制动系统,该车辆制动系统中可以由压力传感器,控制器以及制动组件组成,该压力传感器可以设置在方向盘上,该压力传感器用于采集手握方向盘的握持力度,并将采集到的该手握方向盘的握持力度发送至车辆的控制器(例如,mcu(micro controller unit,微控制器),以使车辆的控制器根据该手握方向盘的握持力度控制车辆中的制动组件,从而控制车辆制动。
47.之所以考虑通过手握方向盘的握持力度控制车辆制动,是由于相关技术中的车辆制动系统,均是依靠驾驶员的腿部动作踩踏制动踏板实现制动,然而,通过对以往众多交通事故的原因进行统计分析发现,大多数交通事故都是由驾驶员的生理及心理因素的限制导致,例如,驾驶员看到对面的车辆行驶过来,预计到会发生碰撞,然而却因为紧张而导致心跳加速、手心出汗、双腿麻木的现象,以至于无法实施踩踏制动踏板的动作,因此不能有效避免碰撞发生。也就是说,目前的制动系统,制动过程过分依赖驾驶员的腿部动作,只能通过腿部动作实施制动行为,这样在驾驶员情绪紧张的情况下,容易因为肢体僵硬而无法实施有效的制动动作,从而无法有效避免碰撞事故的发生,不利于提升车辆动系统的可靠性,也不利于提升整车的安全性能。
48.为了解决相关技术中存在的上述技术问题,本公开提供了一种控制车辆制动的方法、装置和车辆,该方法通过获取车辆当前的行驶速度;确定该行驶速度对应的目标力度阈值;获取驾驶员当前手握方向盘的第一握持力度;在确定该第一握持力度大于或者等于该目标力度阈值的情况下,控制该车辆制动。这样,根据车辆的行驶速度与驾驶员当前手握方向盘的第一握持力度控制车辆制动,能够有效避免驾驶员因为情绪紧张而肢体僵硬,无法实施踩踏制动踏板行为的问题,能够有效提高车辆制动系统的可靠性,也有利于提升整车的安全性能。
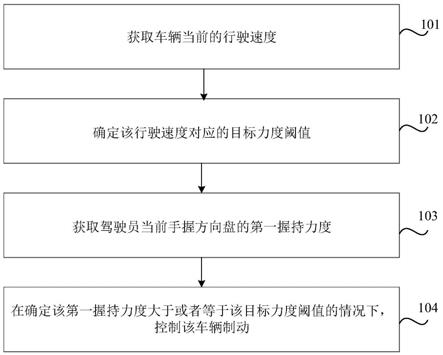
49.图1是本公开一示例性实施例示出的一种控制车辆制动的方法的流程图;参见图1,该方法可以包括以下步骤:
50.步骤101,获取车辆当前的行驶速度。
51.其中,该车辆可以是自动挡车辆,也可以是手动挡车辆。该行驶速度可以通过设置在该车辆中的速度传感器采集得到,当然也可以通过其他相关技术中获取行驶速度的实施方式得到,本公开对此不作限定。
52.步骤102,确定该行驶速度对应的目标力度阈值。
53.本步骤中一种可能的实施方式为,从多个预设速度区间中确定该行驶速度所在的目标速度区间;通过预先生成的压力对应关系,确定该目标速度区间对应的压力阈值,该压力对应关系包括该预设速度区间与压力阈值的对应关系;将该目标速度区间对应的压力阈值,作为该目标力度阈值。
54.其中,该压力对应关系通过以下方法预先生成:在该驾驶员驾驶该车辆起步时,获取该驾驶员在预设时间段内握持该方向盘的最大握持力度,该预设时间段为以该车辆起步时刻为起始时刻,按照预设时长确定的时间段;获取每个该预设速度区间对应的预设阈值系数;根据该最大握持力度和该预设阈值系数确定每个预设速度区间对应的压力阈值,以生成该压力对应关系。
55.步骤103,获取驾驶员当前手握方向盘的第一握持力度。
56.其中,可以通过设置在该车辆方向盘上的压力传感器获取该第一握持力度,该压力传感器可以是:压阻式传感器、陶瓷压力传感器、扩散硅压力传感器、蓝宝石压力传感器、或者压电式压力传感器等,该压力传感器的采集端可以设置在方向盘蒙皮的上面或者下面。
57.示例地,将该压力传感器的采集端包敷在方向盘的蒙皮内,以使整个方向盘的转向圈上99.99%的区域均分布有该压力传感器的压力采集装置,当驾驶员手握方向盘时,该压力传感器能够采集到手握方向盘的握持力度。
58.步骤104,在确定该第一握持力度大于或者等于该目标力度阈值的情况下,控制该车辆制动。
59.需要说明的是,由于驾驶员通常在遇到紧急情况(产生刹车意图)时,会因为情绪紧张而导致手握方向盘的握持力度与正常情况下手握方向盘的力度不同,并且通常在不同的行驶速度区间中,驾驶员在遇到紧急情况时,表现的手握方向盘的力度所处的范围不同,因此在当前的行驶速度下,当驾驶员手握方向盘的力度大于或者等于该行驶速度所在预设速度区间对应的该目标力度阈值时,能够确定该驾驶员当前处于情绪紧张状态,从而在确定驾驶员处于情绪紧张状态的情况下,控制车辆制动。
60.通过上述技术方案,根据车辆的行驶速度与驾驶员当前手握方向盘的第一握持力度控制车辆制动,能够有效避免驾驶员因为情绪紧张而肢体僵硬,无法实施踩踏制动踏板行为的问题,能够有效提高车辆制动系统的可靠性,也有利于提升整车的安全性能。
61.图2是本公开另一示例性实施例示出的一种控制车辆制动的方法的流程图;参见图2,该方法可以包括以下步骤:
62.步骤201,在该驾驶员驾驶该车辆起步时,获取该驾驶员在预设时间段内握持该方向盘的第二握持力度。
63.其中,该预设时间段为以该车辆起步时刻为起始时刻,按照预设时长确定的时间段;在该车辆的行驶速度由零变为非零,且该车辆的油门踏板的开度大于零的情况下,确定当前该车辆处于起步时刻。
64.步骤202,确定该第二握持力度是否大于或者等于指定力度阈值。
65.其中,该指定力度阈值大于任一预设速度区间对应的压力阈值。
66.本步骤中,在确定该第二握持力度大于或者等于指定力度阈值的情况下,执行步
骤212,在确定该第二握持力度小于该指定力度阈值的情况下,执行步骤203。
67.需要说明的是,该指定力度阈值用于在车辆起步之后的预设时间段内确定驾驶员是否遇到紧急情况,在确定该第二握持力度大于或者等于该指定力度阈值的情况下,确定该驾驶员遇到紧急情况(产生刹车意图),需控制车辆制动;在确定该第二握持力度小于该指定力度阈值的情况下,确定驾驶员未遇到紧急制动情况(未产生刹车意图),车辆当前无需制动。
68.步骤203,获取每个该预设速度区间对应的预设阈值系数。
69.其中,该预设阈值系数可以通过以下方式预先得到:
70.获取n个驾驶员中每个驾驶员在每个预设速度区间中m次不具有刹车意图情况下对应的手握方向盘的第一最大力度,以及该驾驶员在该预设速度区间中m次具有刹车意图情况下对应的手握方向盘的第二最大力度,获取该第二最大力度与该第一最大力度的比值,作为该驾驶员在该预设速度区间的刹车阈值系数,同理,分别获取该预设速度区间内每个驾驶员对应的刹车阈值系数,获取该预设速度区间内n个驾驶员对应的刹车阈值系数的平均值,将该平均值作为该预设速度区间对应的预设阈值系数。
71.示例地,在n为10,m为20时,若该预设速度区间包括(0,30]km/h,(30,60]km/h,(60,90]km/h,(90,120]km/h,(120,150]km/h,则确定该预设阈值系数的样本数据包括:10个驾驶员中第一个驾驶员在预设速度区间(0,30]km/h范围内的20次不具有刹车意图情况下手握方向盘的力度信息(p01,p02
……
p20),以及该第一个驾驶员在预设速度区间(0,30]km/h范围内的20次具有刹车意图情况下手握方向盘的力度信息(q01,q02
……
q20),确定该(p01,p02
……
p20)中的最大值为p1max,该(q01,q02
……
q20)中的最大值为q1max,确定该q1max与p1max的比值k1,同理,确定第二驾驶员在预设速度区间(0,30]km/h范围内对应的p2max,q2max,以及q2max与p2max的比值k2;确定第三驾驶员在预设速度区间(0,30]km/h范围内对应的p3max,q3max,以及q3max与p3max的比值k3;确定第四驾驶员在预设速度区间(0,30]km/h范围内对应的p4max,q4max,以及q4max与p4max的比值k4;确定第五驾驶员在预设速度区间(0,30]km/h范围内对应的p5max,q5max以及q5max与p5max的比值k5;确定第六驾驶员在预设速度区间(0,30]范围内对应的p6max,q6max以及q6max与p6max的比值k6;确定第七驾驶员在预设速度区间(0,30]km/h范围内对应的p7max,q7max以及q7max与p7max的比值k7;确定第八驾驶员在预设速度区间(0,30]km/h范围内对应的p8max,q8max以及q8max与p8max的比值k8;确定第九驾驶员在预设速度区间(0,30]km/h范围内对应的p9max,q9max以及q9max与p9max的比值k9;确定第十驾驶员在预设速度区间(0,30]km/h范围内对应的p10max,q10max以及q10max与p10max的比值k10;获取(k1,k2
……
k10)的平均值将该平均值确定为该预设速度区间(0,30]km/h对应的预设阈值系数k,同理分别确定出(30,60]km/h,(60,90]km/h,(90,120]km/h,(120,150]km/h对应的预设阈值系数。需要指出的是,以上数据仅用于示例性说明预设阈值系数的确定方法,并不用于限定具体的保护范围。
72.步骤204,确定该预设时间段内手握方向盘的最大握持力度。
73.其中,在该预设时间段内压力传感器会多次采集驾驶员手握方向盘的力度,即每隔一个采集周期(例如,每隔2毫秒采集一次)采集一次驾驶员手握车辆中方向盘的力度,从多个采集的力度中确定该最大握持力度。
74.示例地,该预设时间段为5分钟,若该压力传感器每秒采集30次该驾驶员手握方向
盘的力度,则该5分钟内采集到150个力度值,将该150个力度值中最大的力度值确定为该最大握持力度。
75.步骤205,根据该最大握持力度和该预设阈值系数确定每个预设速度区间对应的压力阈值,以生成该压力对应关系。
76.本步骤中,一种可能的实施方式为:将每个该预设速度区间对应的预设阈值系数与该最大握持力度的乘积作为该预设速度区间对应的压力阈值。
77.示例地,该最大握持力度为a,该预设速度区间(0,30]km/h对应的预设阈值系数为ka,该预设速度区间(30,60]km/h对应的预设阈值系数为kb,该预设速度区间(60,90]km/h对应的预设阈值系数为kc,该预设速度区间(90,120]km/h对应的预设阈值系数为kd,该预设速度区间(120,150]km/h对应的预设阈值系数为ke,则该预设速度区间(0,30]km/h对应的压力阈值为a
·
ka,该预设速度区间(30,60]km/h对应的压力阈值为a
·
kb,该预设速度区间(60,90]km/h对应的压力阈值为a
·
kc,该预设速度区间(90,120]km/h对应的压力阈值为a
·
kd,该预设速度区间(120,150]km/h对应的压力阈值为a
·
ke。
78.这样,通过以上步骤201至步骤205在每次车辆起步时,首先根据当前驾驶员在该预设时间段内的手握方向盘的最大握持力度与预设阈值系数生成该当前驾驶员对应的压力对应关系,以在生成该压力对应关系之后,根据该压力对应关系控制车辆制动。由于每次起步时都能够根据当前驾驶员在该预设时间段内的最大握持力度更新该压力对应关系,从而能够针对不同的驾驶员生成各自的压力对应关系,能够有效提升制动系统的可靠性。
79.步骤206,获取车辆当前的行驶速度。
80.步骤207,从多个预设速度区间中确定该行驶速度所在的目标速度区间。
81.示例地,车辆当前的行驶速度为65km/h,若预设速度区间包括(0,30]km/h,(30,60]km/h,(60,90]km/h,(90,120]km/h以及(120,150]km/h,则该行驶速度对应的目标速度区间为(60,90]km/h。
82.步骤208,通过预先生成的压力对应关系,确定该目标速度区间对应的压力阈值。
83.其中,该压力对应关系包括该预设速度区间与压力阈值的对应关系。
84.示例地,在该压力对应关系中,该预设速度区间(0,30]km/h对应的压力阈值为a
·
ka,该预设速度区间(30,60]km/h对应的压力阈值为a
·
kb,该预设速度区间(60,90]km/h对应的压力阈值为a
·
kc,该预设速度区间(90,120]km/h对应的压力阈值为a
·
kd,该预设速度区间(120,150]km/h对应的压力阈值为a
·
ke。
85.步骤209,将该目标速度区间对应的压力阈值,作为该目标力度阈值。
86.示例地,在该车辆当前的行驶速度为65km/h的情况下,由于该行驶速度对应的目标速度区间为(60,90]km/h,该预设速度区间(60,90]km/h对应的压力阈值为a
·
kc,因此,该目标力度阈值为a
·
kc。
87.步骤210,获取驾驶员当前手握方向盘的第一握持力度。
88.需要说明的是,该第一握持力度为在生成该压力对应关系之后,该压力传感器采集到的握持力度;该第二握持力度为在生成该压力对应关系的过程中,该压力传感器采集到的握持力度,即在该预设时间段内采集到的握持力度。
89.步骤211,确定该第一握持力度大于或者等于该目标力度阈值。
90.本步骤中,在确定该第一握持力度大于或者等于该目标力度阈值的情况下,执行
步骤212;在确定该第一握持力度小于该目标力度阈值的情况下,执行步骤206。
91.需要说明的是,在确定该第一握持力度大于或者等于该目标力度阈值的情况下,确定该驾驶员当前产生了刹车意图,甚至可能处于情绪紧张状态,在处于情绪紧张状态时,通常容易产生心跳加速、手心出汗、双腿麻木的生理表现,在这种状态下通常不能实施有效的驾驶操作行为,也容易出现误操作行为,从而很容易导致交通事故的出现。本公开通过该第一握持力度与该目标力度阈值的关系,确定驾驶员是否产生了刹车意图,在确定产生刹车意图的情况下,执行步骤212控制车辆制动,能够有效避免驾驶员因为情绪紧张而造成的无法实施制动操作的问题。
92.步骤212,控制车辆制动。
93.本步骤中,能够根据驾驶员在情绪紧张状态下手握方向盘的力度控制车辆制动,从而能够有效避免因为驾驶员情绪紧张而导致的无法实施有效的制动操作行为的问题,能够提升车辆制动系统的可靠性。
94.这样,通过步骤206至步骤212所述的方法,能够根据车辆的行驶速度确定目标力度阈值,根据驾驶员当前手握方向盘的第一握持力度与该目标力度阈值控制车辆制动,能够有效避免驾驶员因为情绪紧张而肢体僵硬,无法实施踩踏制动踏板行为的问题,能够有效提高车辆制动系统的可靠性,也有利于提升整车的安全性能。
95.图3是本公开又一示例性实施例示出的一种控制车辆制动的装置的框图;参见图3,该装置包括:
96.第一获取模块301,用于获取车辆当前的行驶速度;
97.第一确定模块302,用于确定该行驶速度对应的目标力度阈值;
98.第二获取模块303,用于获取驾驶员当前手握方向盘的第一握持力度;
99.第二确定模块304,用于在确定该第一握持力度大于或者等于该目标力度阈值的情况下,控制该车辆制动。
100.通过上述技术方案,根据车辆的行驶速度与驾驶员当前手握方向盘的第一握持力度控制车辆制动,能够有效避免驾驶员因为情绪紧张而肢体僵硬,无法实施踩踏制动踏板行为的问题,能够有效提高车辆制动系统的可靠性,也有利于提升整车的安全性能。
101.图4是根据图3所示实施例示出的一种控制车辆制动的装置的框图;参见图4,该第一确定模块302包括:
102.第一确定子模块3021,用于从多个预设速度区间中确定该行驶速度所在的目标速度区间;
103.第二确定子模块3022,用于通过预先生成的压力对应关系,确定该目标速度区间对应的压力阈值,该压力对应关系包括该预设速度区间与压力阈值的对应关系;
104.第三确定子模块3023,用于将该目标速度区间对应的压力阈值,作为该目标力度阈值。
105.可选地,该装置还包括:
106.关系生成模块305,用于在该驾驶员驾驶该车辆起步时,获取该驾驶员在预设时间段内握持该方向盘的最大握持力度,该预设时间段为以该车辆起步时刻为起始时刻,按照预设时长确定的时间段;获取每个该预设速度区间对应的预设阈值系数;根据该最大握持力度和该预设阈值系数确定每个预设速度区间对应的压力阈值,以生成该压力对应关系。
107.可选地,该关系生成模块305用于:
108.将每个该预设速度区间对应的预设阈值系数与该最大握持力度的乘积作为该预设速度区间对应的压力阈值。
109.可选地,该装置还包括:
110.第三确定模块306,用于在生成该压力对应关系的过程中,若该驾驶员当前握持该方向盘的第二握持力度大于或者等于指定力度阈值,则控制该车辆制动。
111.这样,能够根据车辆的行驶速度确定目标力度阈值,根据驾驶员当前手握方向盘的第一握持力度与该目标力度阈值控制车辆制动,能够有效避免驾驶员因为情绪紧张而肢体僵硬,无法实施踩踏制动踏板行为的问题,能够有效提高车辆制动系统的可靠性,也有利于提升整车的安全性能。
112.本公开另一示例性实施例示出一种车辆,该车辆包括以上图3或图4所述的控制车辆制动的装置。
113.关于上述实施例中的装置,其中各个模块执行操作的具体方式已经在有关该方法的实施例中进行了详细描述,此处将不做详细阐述说明。
114.以上结合附图详细描述了本公开的优选实施方式,但是,本公开并不限于上述实施方式中的具体细节,在本公开的技术构思范围内,可以对本公开的技术方案进行多种简单变型,这些简单变型均属于本公开的保护范围。
115.另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合,为了避免不必要的重复,本公开对各种可能的组合方式不再另行说明。
116.此外,本公开的各种不同的实施方式之间也可以进行任意组合,只要其不违背本公开的思想,其同样应当视为本公开所公开的内容。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。