1.本发明涉及一种自推进式建筑机械,特别是道路铣刨机、稳定机、再生机或露天采矿机,并且涉及一种用于调节建筑机械的边缘保护器的高度的方法,建筑机械特别是道路铣刨机、稳定机、再生机或露天采矿机。
背景技术:
2.自推进式建筑机械是已知的,特别是道路铣刨机、再生机、稳定机或露天采矿机,其包括至少一个机架、至少三个行进装置和至少一个作业装置,作业装置特别是铣刨鼓,用于对地面摊铺路面进行作业。至少一个作业装置,特别是铣刨鼓,优选地布置在朝向底部开放的壳体中,壳体在至少一侧上通过相对于机架能够高度调节的至少一个边缘保护器至少部分地封闭,其中,为了高度调节的目的,设置至少一个第一升降装置,该第一升降装置的第一端连接到机架,并且其第二端连接到能够高度调节的边缘保护器。
3.朝向底部开放的壳体可以朝如在操作方向上所见的前部并且朝如在操作方向上所见的后部封闭。例如,可以朝如在操作方向上所见的前部设置压紧装置,并且刮刀装置可朝如在操作方向上所见的后部设置。在每侧上,朝底部开放的壳体能够通过一个能够高度调节的边缘保护器至少部分地封闭,边缘保护器基本上在建筑机械的纵向方向上延伸。边缘保护器也能够被称为侧板。
4.至少一个边缘保护器可以被升高和降低。边缘保护器可以搁置在地面上。在建筑机械的前进运动期间,则可以将边缘保护器拉动跨过地面。在此过程中,边缘保护器可以通过施加预定的力而被额外地加载或释放。例如,在ep 2695994中已经描述了能够高度调节的边缘保护器。
5.例如,如果要避开障碍物,或者例如在行驶到路缘上时,或者如果要防止卡住,则边缘保护器可以被升高。然而,在建筑机械的操作过程期间,边缘保护器优选地被降低,从而壳体被封闭。
6.如果作业装置是铣刨鼓,则边缘保护器优选地在操作期间搁置在铣刨鼓端侧旁边的铣刨边缘上,即,搁置在未被铣刨的区域上,在未被铣刨的区域,边缘保护器相应地抵制未被铣刨的区域被碾碎,或防止被铣刨掉的物料从壳体逸出。
7.例如,道路铣刨机可用于拆除道路的现有的地面摊铺路面。再生机可用于修复现有的地面摊铺路面。稳定机用于为道路施工准备路基的目的。露天采矿机可用于开采煤炭和矿石。
8.在现有技术中,例如de 19631042,建筑机械是已知的,特别是所谓的小型铣刨机,其中从动行进装置被实现为能够枢转的行进装置。能够枢转的行进装置能够相对于机架围绕至少一条竖直枢转轴线从至少一个第一枢转入的位置枢转到至少一个第二枢转出的位置。在机架的一侧上,即在机架的所谓的零间隙侧上,作业装置可以与机架的所谓的零间隙侧齐平地终止。能够枢转的行进装置可布置在机架的所述零间隙侧上,其中能够枢转的行进装置在第一枢转入的位置中不相对于机架在零间隙侧上突出,而在至少第二枢转出的位
置中,可枢转的行进装置相对于零间隙侧突出。如在向前方向上所见,能够枢转的行进装置可以优选地是后部行进装置。作业装置优选地以如此的方式布置在机架上,使得当能够枢转的行进装置处于其枢转出的位置中时,其定位在后部行进装置之间。当能够枢转的行进装置处于枢转入的位置中时,如在向前方向上所见,它优选地位于作业装置的前方。
9.向前的行进方向是铣刨机在预期的铣刨操作期间移动的方向,即优选的操作方向。
10.在该过程中,铣刨鼓通常在与地面接合单元的旋转方向相反的方向上旋转。
11.例如,当作业装置靠近沿着房屋墙壁的边缘或类似障碍物进行铣刨时,能够枢转的行进装置可以转移到第一枢转入的位置,这使得与如果行进装置布置在作业装置旁边和处于枢转出的位置时的情况相比,建筑机械能够明显地更靠近障碍物行驶。另一方面,当不靠近边缘进行铣刨时,期望将行进装置布置在作业装置旁边,以便机械获得更稳定的支撑。
12.在设置有能够枢转的行进装置的建筑机械的情况下,特别在执行行进装置的枢转运动的区域中存在空间问题。出于该原因,第一升降装置经常用作边缘保护器的单个升降装置,这往往导致至少一个边缘保护器在借助至少一个第一升降装置升降期间卡住的问题。
技术实现要素:
13.本发明的目的是提供一种建筑机械和一种用于对建筑机械的边缘保护器进行高度调节的方法,其中改进了边缘保护器的升降运动。
14.上述目的通过一种自推进式建筑机械(1)来实现,特别是道路铣刨机、稳定机、再生机或露天采矿机,该自推进式建筑机械(1)包括:
[0015]-机架(2),和
[0016]-至少一个作业装置(6),特别是铣刨鼓,其布置在朝向底部开放的壳体(4)中,通过相对于机架(2)能够高度调节的至少一个边缘保护器(8),壳体(4)在至少一侧上至少部分地封闭,其中,为了高度调节的目的,设置至少一个第一升降装置(10),该至少一个第一升降装置的第一端(15)连接到机架(2),并且其第二端(16)连接到能够高度调节的边缘保护器(8);
[0017]-其中设置第二升降装置(12),第二升降装置的第一端(18)连接到机架(2),并且第二升降装置的第二端(20)连接到传动装置(14)的第一端(22),传动装置(14)通过其第二端(24)顺次连接到能够高度调节的边缘保护器(8)。
[0018]
此外,上述目的通过一种用于对建筑机械(1)的边缘保护器(8)进行高度调节的方法来实现,特别是道路铣刨机、稳定机、再生机或露天采矿机,该方法通过以下实现:
[0019]-通过至少一个第一升降装置(10)调节边缘保护器(8),该边缘保护器(8)在第一端连接到机架,并且在第二端连接到能够高度调节的边缘保护器(8);
[0020]-其中,除第一升降装置(10)之外,使用第二升降装置(12)进行调节,其中第二升降装置(12)将用于调节边缘保护器(8)的力施加到传动装置(14),并且传动装置(14)将力传递到边缘保护器(8)。
[0021]
本发明有利地设置成提供第二升降装置,其第一端连接到机架,并且其第二端连接到传动装置的第一端,传动装置又通过第二端连接到能够高度调节的边缘保护器。
[0022]
本发明具有的优点在于,使用传动装置代替将第二升降装置直接布置在边缘保护器上。需要比升降装置显著更少的空间,所述传动装置即能够被实现。这允许将升降装置布置在有足够可用空间的区域中。此外,还可以任意选择通过传动装置作用在边缘保护器上的力的施加点。
[0023]
第一升降装置和/或第二升降装置也可称为致动器。第一升降装置和/或第二升降装置可以是活塞缸单元。对于第一升降装置和第二升降装置而言不一定是活塞-缸单元;例如,也可以使用主轴驱动器或线性致动器。
[0024]
传动装置可以优选地在两个力方向上传递力,使得边缘保护器可以借助于传动装置被升高或降低。
[0025]
为了本技术的目的,刚性连接到支撑结构的所有部件都是机架的一部分。刚性连接到建筑机械的支撑结构的壳体的所有部件因此也都是机架的一部分。
[0026]
在优选实施例中,如在优选操作方向上所见,操作员的平台和建筑机械的作业装置都位于后部地面接合单元的区域中,其中之一已经以如上所述的能够枢转的设计实现。在这种布置中,至少后部地面接合单元以能够高度调节的设计实现,以允许调节铣刨深度。
[0027]
在建筑机械的行进方向上,第一升降装置的第二端能够在边缘保护器的后部部段中连接到能够高度调节的边缘保护器。在建筑机械的行进方向上,传动装置的第二端优选地连接到边缘保护器的前部部段,其中边缘保护器的前部部段是能够高度调节的边缘保护器从建筑机械的行进方向上看位于能够高度调节的边缘保护器的重心前方的部段,其中能够高度调节的边缘保护器的后部部段是边缘保护器从建筑机械的行进方向上看位于边缘保护器的重心后方的部段。
[0028]
在行进方向上可以意味着在建筑机械的向前行进方向上或在建筑机械的反向行进方向上。
[0029]
由于第一升降装置连接到边缘保护器的后部部段并且传动装置连接到边缘保护器的前部部段,力可以最佳地分布跨过边缘保护器,使得边缘保护器将不卡住。
[0030]
传动装置可以以如此的方式设计,使得通过传动装置,第二升降装置作用在边缘保护器上的力的施加点和/或力的方向是能够任意确定的。
[0031]
因此,本发明提供的优点是可以最佳地确定第二升降装置作用在边缘保护器上的力的施加点和力的方向。施加点可以以第一升降装置和第二升降装置的力以平衡的方式作用在边缘保护器上的方式确定。此外,力的方向可以最佳地适应于边缘保护器的运动方向。
[0032]
传动装置可以是齿轮单元或杠杆臂。
[0033]
传动装置可包括至少两个、优选三个铰接接头和至少两个联接元件。
[0034]
联接元件可以设计为杆元件。
[0035]
第二升降装置可以通过第一铰接接头连接到至少一个第一联接元件,并且边缘保护器可以通过第二铰接接头连接到至少一个第二联接元件。
[0036]
传动装置可以如此的方式布置和设计,使得从传动装置作用在边缘保护器上的传动力相对于地面表面基本垂直地作用。以此方式,力优选地在边缘保护器上下运动的相同方向上作用。
[0037]
行进装置可以通过升降柱连接到机架。机架可通过升降柱调节高度。因此,作业装置,特别是铣刨鼓,也可以在高度上进行调节。升降柱可以设置在所有行进装置上。然而,升
降柱例如也可以仅布置在后部行进装置上。建筑机械呈现纵向方向。所述纵向方向优选地沿行进方向延伸。当建筑机械立于水平地面表面上并且前后升降柱延伸到同等程度时,纵向方向平行于地面表面布置。此外,建筑机械呈现竖直方向,竖直方向正交于纵向方向布置,并且当建筑机械立在水平地面表面上并且前后升降柱延伸到同等程度时,竖直方向正交于地面表面布置。
[0038]
能够从传动装置传递到边缘保护器的力的方向能够从竖直方向偏离最大 /-55
°
,优选偏离最大 /-45
°
。
[0039]
第一联接元件和第二联接元件可以通过第三铰接接头连接,其中第三铰接接头优选地既不连接到机架也不连接到边缘保护器。
[0040]
第一联接元件可以通过第四铰接接头连接到机架。
[0041]
第一铰接接头可以布置在第四铰接接头和第三铰接接头之间的第一联接元件上。
[0042]
传动装置的第二端可以在圆形路径上运动。
[0043]
联接元件可以本质上是刚性的。
[0044]
此外可以提供一种用于调节建筑机械的边缘保护器的高度的方法,建筑机械特别是道路铣刨机、稳定机、再生机或露天采矿机,所述方法具有以下特征:
[0045]-通过至少一个升降装置调节边缘保护器,至少一个升降装置在第一端连接到机架,并且在第二端连接到能够高度调节的边缘保护器;
[0046]-其中,除第一升降装置外,使用第二升降装置进行调节,其中第二升降装置将用于调节边缘保护器的力施加到传动装置,并且传动装置将力传递到侧板。
[0047]
传动装置可以相对于地面表面基本垂直地将力传递到边缘保护器。
[0048]
第一升降装置和第二升降装置可以同时地或相继地施加力。
[0049]
由于在行进方向上第一升降装置的第二端布置在边缘保护器重心的后方,并且在行进方向上传动装置的第二端布置在边缘保护器重心的前方,也可以进行调节,其中边缘保护器的前端以与边缘保护器的后端相比不同的量被升高或降低。
附图说明
[0050]
在下文中,将参考附图更详细地说明本发明的实施例。
[0051]
示意性地示出如下:
[0052]
图1是根据本发明的一种建筑机械;
[0053]
图2是作业装置的壳体的侧视图;
[0054]
图3是带有提高的边缘保护器的、根据图2的壳体的侧视图。
具体实施方式
[0055]
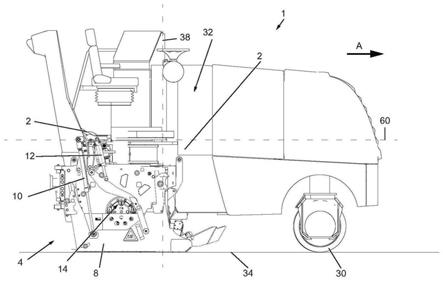
图1示出了自推进式建筑机械1。在所描绘的实施例中,自推进式建筑机械1是道路铣刨机。所述建筑机械1包括机架2和至少三个行进装置30。所描绘的建筑机械1包括两个前部行进装置30和两个后部行进装置30,其中为清楚起见,在图1中仅右手侧的前部行进装置30可见。在根据图1的建筑机械中,如在行进方向a上所见,所述行进装置将布置在壳体4的右手侧。在图1中,从行进方向a上看,布置在左手侧的后部行进装置通过被刚性连接到机架的壳体4覆盖。为清楚起见,在图1中省略如在行进方向a上看布置在右手侧的后部行进装
置,以便提供铣刨鼓壳体的更好视图。例如,在de 19631042中描述了一种能够枢转的行进装置。行进装置可以是轮子,如在所描绘的实施例中,或者也可以是履带式地面接合单元。
[0056]
行进装置30可以通过升降柱连接到机架2。机架2在高度上能够通过升降柱进行调节。因此,作业装置6,特别是铣刨鼓,也可以相对于地面34在高度上进行调节。升降柱可以设置在所有行进装置30上。然而,升降装置也可以例如仅布置在后部行进装置上。建筑机械1呈现纵向方向60。当建筑机械1立于水平地面上且前后升降柱延伸到同等程度时,所述纵向方向60平行于地面表面布置。此外,建筑机械呈现竖直方向38,竖直方向38正交于纵向方向60布置,并且当建筑机械1立在水平地面表面上并且前后升降柱延伸到同等程度时,竖直方向38正交于地面表面布置。
[0057]
行进装置30可以分别通过至少一个液压驱动系统驱动。在建筑机械1中,可以驱动至少两个行进装置30,其中,例如,也可以不驱动前部行进装置。至少三个行进装置30中的一个可被实现为能够枢转的行进装置30。所述行进装置30可相对于机架2围绕至少一个竖直枢转轴线在第一枢转入的位置和至少一个第二枢转出的位置之间枢转。在所描绘的实施例中,从行进方向上看,布置在右手侧的未描绘的后部行进装置30被实现为能够枢转的行进装置。
[0058]
建筑机械1可以呈现所谓的零间隙侧(zero-clearance side)。作业装置6可以以其一个前端与机架2的零间隙侧几乎齐平地布置,从而可以在建筑机械1的零间隙侧进行靠近边缘的作业。为此目的,能够枢转的行进装置从超出零间隙侧平面的枢转出的位置向内枢转到机架2的切口32中,使得可枢转的行进装置的外边缘不突出超过零间隙侧并且可以优选地与零间隙侧齐平地终止。
[0059]
能够枢转的行进装置也可以枢转到不止一个外部的枢转出的位置。
[0060]
此外,提供至少一个作业装置6,如在所描绘的实施例中,其可以是铣刨鼓。作业装置可以对地面摊铺路面进行作业。
[0061]
至少一个作业装置6,特别是铣刨鼓,优选地布置在朝底部开放的壳体4中,通过相对于机架2能够调节高度的至少一个边缘保护器8,该壳体4在至少一侧上至少部分地封闭。如果作业装置6为铣刨鼓,则壳体4也可被称为铣刨鼓壳体。为了本技术的目的,刚性连接到支撑结构的所有部件都是机架2的一部分。刚性连接到建筑机械1的支撑结构的壳体的所有部件因此也都是机架2的一部分。
[0062]
朝底部开放的壳体4可以在从行进方向a上看朝前部并在从行进方向a上看朝后部封闭。例如,可以从行进方向a上看朝前部设置压紧装置,以及刮刀装置可以从行进方向a上看朝后部布置。在侧面,朝底部开放的壳体4可以至少在一侧被能够高度调节的边缘保护器8部分地封闭。边缘保护器8也可以被称为能够高度调节的侧板。优选在壳体4的两侧上各设置一个能够高度调节的边缘保护器8。
[0063]
至少一个边缘保护器8可以被升高和降低。边缘保护器可以搁置在地面34上。在建筑机械1的前进运动期间,边缘保护器8可以被拉动跨过地面34。在此过程中,边缘保护器8可以通过施加预定的力额外地加载或释放。
[0064]
例如,如果要避开障碍物,或者例如在行驶到路缘上时,或者如果要防止卡住,则边缘保护器8可以被升高。然而,在建筑机械的操作过程期间,边缘保护器8优选地被降低,从而壳体4被封闭。边缘保护器优选地在操作期间搁置在铣刨边缘上,即,搁置在未被铣刨
的区域上,并且防止未被铣刨的区域被碾碎。
[0065]
边缘保护器8优选地通过两个引导件在壳体内部被引导。优选地,每个引导件包括一个上限止挡部和一个下限止挡部。例如,引导件可以被实现为凹槽。在这种情况下,例如,可以在边缘保护器8上设置螺栓,螺栓在相应的凹槽中被引导。
[0066]
边缘保护器8也可以进行小的旋转运动。例如,这可以通过在相应引导件中的一定量的游隙来实现。
[0067]
为了边缘保护器的高度调节的目的,设置至少一个第一升降装置10和第二升降装置12。高度的调节可以参考图1和图2更详细地示出。升降装置10的第一端15连接到机架2,而其第二端16连接到能够高度调节的边缘保护器8。第二升降装置12通过第一端18连接到机架2,并通过第二端20连接到传动装置14的第一端22,传动装置14又通过第二端24连接到能够高度调节的边缘保护器8。
[0068]
由于传动装置14,第二升降装置12的力的施加点是可任意确定的。力的施加点通常在用附图标记28标示的位置。然而,由于传动装置14,第二升降装置的力的施加点在用附图标记26标示的位置。因此,由第二升降装置12施加的力在施加点26处作用在边缘保护器8上。
[0069]
由于传动装置14,第二升降装置12的传递到边缘保护器8的力的力方向也可以是任意确定的。如果第二升降装置12直接连接到施加点26,则由第二升降装置12传递的力将具有在纵向方向上作用的显著更高的分力。在本发明中,一个优点是作用在竖直方向上的力36的分力显著更高。在竖直方向上作用的力36的分力使边缘保护器8升高和降低。此外,提供传动装置14提供的优点是作用在纵向方向上的力36的分力是小的。作用在纵向方向上的力36的分力将导致卡住。
[0070]
因此,传动装置14优选地以如此的方式布置和设计,使得从传动装置14传递到边缘保护器8的力36相对于地面表面34基本上垂直地作用。可以从传动装置14传递到边缘保护器8的力优选地从竖直方向38偏离最大 /-55
°
。
[0071]
第一升降装置10的第一端15连接到机架2。
[0072]
第一升降装置10的第二端16在边缘保护器8在建筑机械1的行进方向a上的后部部段40中连接到能够高度调节的边缘保护器8,并且其中传动装置14的第二端24连接到边缘保护器8在建筑机械1的行进方向a上的前部部段42。边缘保护器8的前部部段42可以是从建筑机械1的行进方向a上看位于能够高度调节的边缘保护器8的重心s前方的能够高度调节的边缘保护器8的部段,其中能够高度调节的边缘保护器8的后部部段40是从建筑机械1的行进方向上看位于边缘保护器8的重心s后方的边缘保护器8的部段。
[0073]
在当前情况下,行进方向a是建筑机械1的向前方向。可替代地,建筑机械可以如此的方式设计,使得第一升降装置10的第二端16在边缘保护器8的从建筑机械1的向前方向上看的前部部段42中连接到能够高度调节的边缘保护器8,并且其中传动装置14的第二端24连接到边缘保护器8从建筑机械1的向前方向上看的后部部段40。
[0074]
在当前情况下,第二升降装置12通过第一铰接接头21连接到至少一个第一联接元件50,并且在当前情况下,边缘保护器8通过第二铰接接头23连接到至少一个第二联接元件52。联接元件50、52可以设计为如所描绘的实施例中的杆元件。因此,联接元件可以本质上是刚性的。
[0075]
第一联接元件50和第二联接元件52可以通过第三铰接接头54连接,其中第三铰接接头54可以既不连接到机架2也不连接到边缘保护器8。
[0076]
第一联接元件50可以通过第四铰接接头56连接到机架2。
[0077]
第一铰接接头21可以在第四铰接接头56和第三铰接接头54之间布置在第一联接元件50上。
[0078]
在图3中,边缘保护器8被升高。传动装置14的运动从图2和图3变得清楚。第二联接元件52围绕第二铰接接头23枢转。然而,在该过程中,第二联接元件52相应地基本上垂直于地面表面或从竖直方向38偏离不超过 /-为55
°
。第一联接元件50围绕第四铰接接头56枢转。第一联接元件50由第二升降装置12驱动。第一联接元件50和第二联接元件52通过第三铰接接头54连接到彼此,从而第一联接元件50的运动导致第二联接元件52的运动。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。