1.本实用新型涉及一种海底电缆路由定位装置,属于海底电缆定位技术领域。
背景技术:
2.海底电缆埋设于海底,相比于陆地上的电缆,对海底电缆的定位难度更高。对海底电缆的定位是海底电缆维护、检修和升级的重要步骤。海底电缆路由即电缆在海底的铺设线路,快速且准确的标定海底电缆路由能够降低电缆维护的时间,减少因发生故障而造成的损失。目前在海底电缆探测上应用最广的是基于声、光、电和磁学等物理原理的技术手段。其中,光学和电学探测手段在实际深水环境条件下使用受到限制较大。声学探测法基于声波的反射回播对海底电缆路由进行定位。由于声波无法穿透覆盖在海底电缆上的泥沙,因此对埋设电缆的探测效果不好。磁探测技术对海底电缆路由定位具有识别能力强、运行时间短、定位精度好、实时性好成本低的优势,但是现有的磁探测法对海缆路由的远距离探测能力较弱,当传感器离海缆路由较远时,探测效果不好。
技术实现要素:
3.为了克服上述问题,本实用新型提供一种海底电缆路由定位装置,该定位装置通过两个三轴磁传感器对海底电缆产生的磁信号进行采集。其中,线圈传感器有利于在较远距离采集海底电缆产生的磁信号,磁通门传感器有利于在较近距离采集海底电缆产生的磁信号。
4.本实用新型的技术方案如下:
5.一种海底电缆路由定位装置,包括载体机器人和设置在所述载体机器人上的磁通门传感器、线圈传感器、陀螺仪、模数转换器、处理模块和通信模块;所述载体机器人底部设置有水平的履带,所述履带的方向为所述载体机器人的移动方向;所述磁通门传感器和所述线圈传感器沿所述移动方向设置在所述载体机器人的后侧和前侧;所述磁通门传感器和所述线圈传感器均为三轴传感器;所述磁通门传感器和所述线圈传感器的z轴垂直于所述履带;所述磁通门传感器和所述线圈传感器采集海底电缆产生的磁信号,并将所述磁信号传输给所述模数转换器,所述模数转换器将模数转换后的所述磁信号传输给所述处理模块;所述陀螺仪监测所述载体机器人的姿态,并将监测结果传输给所述处理模块;所述处理模块根据所述监测结果修正所述磁信号,并根据所述磁信号控制所述载体机器人移动;所述处理模块通过所述通信模块与远程控制平台交互。
6.进一步的,所述模数转换器为多通道模数转换器。
7.进一步的,所述线圈传感器的灵敏度高于所述磁通门传感器,所述磁通门传感器的量程大于所述线圈传感器。
8.进一步的,所述磁通门传感器和所述线圈传感器通过延伸支架与所述载体机器人连接。
9.进一步的,所述磁通门传感器和所述线圈传感器的y轴或x轴指向所述移动方向。
10.本实用新型具有如下有益效果:
11.1.该定位装置通过两三轴传感器对海底电缆路由产生的磁信号进行采集,并根据两三轴传感器采集的磁信号、两三轴传感器之间的位置关系和坐标对海底电缆进行定位。
12.2.该定位装置的两三轴传感器分别为线圈传感器和磁通门传感器,线圈传感器能采集较弱的磁信号。磁通门传感器能够采集较强的磁信号。扩大了信号采集范围。
13.3.该定位装置通过陀螺仪采集载体机器人的姿态信息,并通过姿态信息修正两三轴传感器采集的磁矢量信号至z轴垂直于水平面。抵消由于姿态变化带来的信号误差。
附图说明
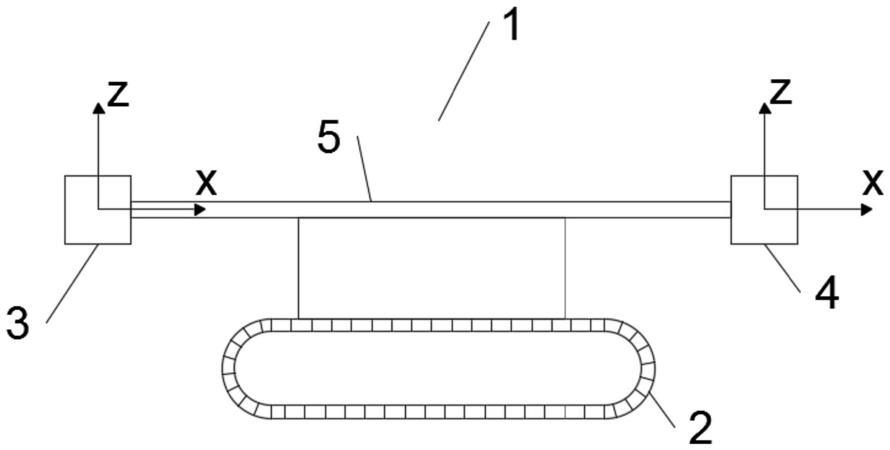
14.图1为本实用新型的整体结构示意图。
15.图中附图标记表示为:
16.1、载体机器人;2、履带;3、磁通门传感器;4、线圈传感器;5、支架。
具体实施方式
17.下面结合附图和具体实施例来对本实用新型进行详细的说明。
18.参见图1,一种海底电缆路由定位装置,包括载体机器人1和设置在所述载体机器人1上的磁通门传感器3、线圈传感器4、陀螺仪、模数转换器、处理模块和通信模块;所述载体机器人1底部设置有水平的履带2,所述履带2的方向为所述载体机器人1的移动方向;所述磁通门传感器3和所述线圈传感器4沿所述移动方向设置在所述载体机器人1的后侧和前侧,所述前侧即为所述移动方向靠前的部分,所述后侧仅为所述移动方向靠后的部分,这样设置,使得两传感器相对于海缆路由的距离差更大,有利于定位;所述磁通门传感器3和所述线圈传感器4均为三轴传感器;所述磁通门传感器3和所述线圈传感器4的z轴垂直于所述履带2;所述磁通门传感器3和所述线圈传感器4采集海底电缆产生的磁信号,并将所述磁信号传输给所述模数转换器,所述模数转换器将模数转换后的所述磁信号传输给所述处理模块;所述陀螺仪监测所述载体机器人1的姿态,并将监测结果传输给所述处理模块;所述处理模块根据所述监测结果修正所述磁信号,并根据所述磁信号控制所述载体机器人1移动;所述处理模块通过所述通信模块与远程控制平台交互。
19.在至少一种实施方式中,所述模数转换器为多通道模数转换器,能够同时对两三轴传感器供六通道的信息进行处理,提高信息处理的效率。
20.在至少一种实施方式中,所述线圈传感器4的灵敏度高于所述磁通门传感器3,所述磁通门传感器3的量程大于所述线圈传感器4。由于海底电缆产生的磁信号在海水中的衰减较快。随着该定位装置与海底电缆的相对距离变化,磁信号强度变化较大使用相同灵敏度和量程的传感器时,若选用灵敏度较高的传感器,则距离较近时线性度不好。若选用量程较大的传感器,则不利于远距离探测。因此选用灵敏度和量程互补的传感器进行磁信号的采集。
21.在至少一种实施方式中,所述磁通门传感器3和所述线圈传感器4通过延伸支架5与所述载体机器人1连接,所述磁通门传感器3和所述线圈传感器4所采集的数据用于计算得到所述载体机器人1与海底电缆的相对距离,通过支架5延长所述磁通门传感器3和所述线圈传感器4之间的距离,用于提取到两个传感器所在位置由海底电缆产生的磁矢量的特
征利于路由定位的计算,该特征包括方向和大小特征。同时能够降低因测量设备精度或噪音产生的误差,提高计算结果的准确性。
22.在至少一种实施方式中,所述磁通门传感器3和所述线圈传感器4的y轴或x轴指向所述移动方向,使得所述磁通门传感器3的所述线圈传感器4采集的数据更加规范,易于处理。
23.参见图1,本实用新型的工作原理如下:
24.本实用新型在使用时,将载体机器人1下放至目标海域,通过线圈传感器4对弱信号的探测能力,在叫大范围内对海底电缆进行探测。当载体机器人1靠近海底电缆后,磁通门传感器3也能采集到磁信号。由于线圈传感器4和磁通门传感器3之间存在一定的位置关系,根据两传感器采集到的磁信号,能够计算得到载体机器人1与海底电缆的位置关系。根据载体机器人1的坐标及其与海底电缆的位置关系,计算得到海底电缆的坐标。通过移动载体机器人1,能够得到海底电缆不同位置的坐标,从而对海底电缆路由进行定位。
25.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构,或直接或间接运用在其他相关的技术领域,均同理包括在本实用新型的专利保护范围内。
技术特征:
1.一种海底电缆路由定位装置,其特征在于,包括载体机器人(1)和设置在所述载体机器人(1)上的磁通门传感器(3)、线圈传感器(4)、陀螺仪、模数转换器、处理模块和通信模块;所述载体机器人(1)底部设置有水平的履带(2),所述履带(2)的方向为所述载体机器人(1)的移动方向;所述磁通门传感器(3)和所述线圈传感器(4)沿所述移动方向设置在所述载体机器人(1)的后侧和前侧;所述磁通门传感器(3)和所述线圈传感器(4)均为三轴传感器;所述磁通门传感器(3)和所述线圈传感器(4)的z轴垂直于所述履带(2);所述磁通门传感器(3)和所述线圈传感器(4)采集海底电缆产生的磁信号,并将所述磁信号传输给所述模数转换器,所述模数转换器将模数转换后的所述磁信号传输给所述处理模块;所述陀螺仪监测所述载体机器人(1)的姿态,并将监测结果传输给所述处理模块;所述处理模块根据所述监测结果修正所述磁信号,并根据所述磁信号控制所述载体机器人(1)移动;所述处理模块通过所述通信模块与远程控制平台交互。2.根据权利要求1所述海底电缆路由定位装置,其特征在于,所述模数转换器为多通道模数转换器。3.根据权利要求1所述海底电缆路由定位装置,其特征在于,所述线圈传感器(4)的灵敏度高于所述磁通门传感器(3),所述磁通门传感器(3)的量程大于所述线圈传感器(4)。4.根据权利要求1所述海底电缆路由定位装置,其特征在于,所述磁通门传感器(3)和所述线圈传感器(4)通过延伸支架(5)与所述载体机器人(1)连接。5.根据权利要求1所述海底电缆路由定位装置,其特征在于,所述磁通门传感器(3)和所述线圈传感器(4)的y轴或x轴指向所述移动方向。
技术总结
本实用新型涉及一种海底电缆路由定位装置,包括载体机器人和设置在载体机器人上的磁通门传感器、线圈传感器、陀螺仪、模数转换器、处理模块和通信模块;载体机器人底部设置有水平的履带;磁通门传感器和线圈传感器沿移动方向设置在载体机器人的后侧和前侧;磁通门传感器和线圈传感器采集海底电缆产生的磁信号,并将磁信号传输给模数转换器,模数转换器将模数转换后的磁信号传输给处理模块;陀螺仪监测载体机器人的姿态,并将监测结果传输给处理模块;处理模块根据监测结果修正磁信号,并根据磁信号控制载体机器人移动;处理模块通过通信模块与远程控制平台交互。本实用新型通过两个三轴磁传感器对海底电缆产生的磁信号进行采集。集。集。
技术研发人员:李勃 林松青 黄文超 俞炜平 李振海 黄汉权 陈臻旭 林宇澄 吴宗泽 王清海
受保护的技术使用者:国网福建省电力有限公司莆田供电公司
技术研发日:2021.08.18
技术公布日:2022/1/25
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。