1.本实用新型涉及激光焊接加工技术领域,尤其涉及一种透射式高精度振镜内同轴视觉激光加工光学系统。
背景技术:
2.激光振镜打标目前应用很广泛,如果打标产品需要定位,一般是用旁轴ccd确定位置,这样定位缺点在于成像质量不好,软件不容易识别。特别对于较小产品,识别和打标需要移动工作台,从而导致生产速度慢。
技术实现要素:
3.本实用新型实施例的目的是提供一种透射式高精度振镜内同轴视觉激光加工光学系统,可有效地提高达标精度和效率。
4.本实用新型实施例提供一种透射式高精度振镜内同轴视觉激光加工光学系统,包括:
5.激光接头,用于连接光纤;
6.振镜系统,用于改变光路;
7.远心消色差扫描物镜,用于接收振镜系统的出射光然后发射激光为工件打标;
8.定位模组,位于所述振镜系统和激光接头之间,所述定位模组包括反射可见光、投射激光的选择透镜,还包括与所述选择透镜反射面对应的成像镜头和与所述成像镜头连接的相机,所述选择透镜与所述振镜系统和激光接头同轴设置,所述选择透镜倾斜设置,从而所述选择透镜的透射面朝向所述激光接头,反射面朝向所述振镜系统,所述定位模组还包括壳体,所述选择透镜位于所述壳体内部,所述成像镜头固定在所述壳体上,所述选择透镜位于所述壳体内部空间的对角线上,且被所述壳体内部空间的对角支撑。
9.进一步的,所述选择透镜的倾斜角度为45
°
。
10.进一步的,所述激光接头与定位模组可拆卸地连接,所述定位模组和振镜系统可拆卸地连接。
11.进一步的,所述激光接头包括qbh光纤接口和准直镜组,所述qbh光纤接口用于连接光纤,所述准直镜组用于准直自光纤射出的光纤,所述准直镜组位于所述定位模组与所述qbh光纤接口之间。
12.进一步的,所述准直镜组包括弯月透镜和双凸面透镜,所述弯月透镜位于所述双凸面透镜与所述qbh光纤接口之间,且所述弯月透镜朝向所述双凸面透镜弯曲。
13.进一步的,所述成像镜头的镜筒的长度大于所述壳体在所述成像镜头轴向上长度。
14.本实用新型实施例提供的透射式高精度振镜内同轴视觉激光加工光学系统具有以下有益效果:所述选择透镜与所述振镜系统和激光接头同轴设置,从而工件的图像与激光束焦点同轴,使得对工件定位或者原点定位的绝对位置精度可以达到0.02mm以上,与软
件配合使用可以完全克服振镜温漂带来的加工位置误差。
附图说明
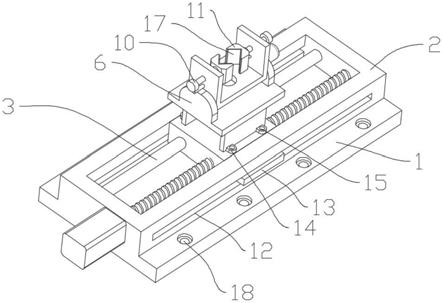
15.图1为本实用新型所述的一种透射式高精度振镜内同轴视觉激光加工光学系统的整体示意图;
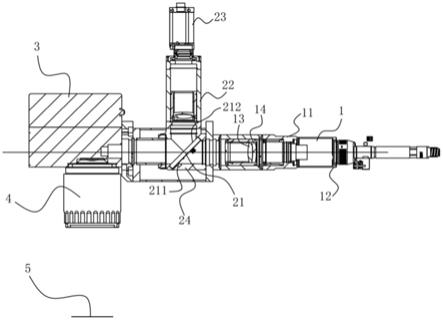
16.图2为图1的剖视图;
17.图3为图2的分解图;
18.图中:
19.1、激光接头;11、外壳;12、qbh光纤接口;13、双凸面透镜;14、弯月形透镜;
20.2、定位模组;21、选择透镜;211、透射面;212、反射面;22、成像镜头;
21.23、相机;24、壳体;
22.3、振镜系统;
23.4、远心消色差扫描物镜;
24.5、工件。
具体实施方式
25.为使本实用新型的目的、技术方案和优点更加清楚,下面将结合附图对本实用新型实施方式作进一步地描述。
26.请参照图1,本实用新型实施例提供一种透射式高精度振镜内同轴视觉激光加工光学系统,包括激光接头1、振镜系统3、远心消色差扫描物镜4和定位模组2。
27.请参照图2,激光接头1包括外壳11和设于所述外壳11的qbh光纤接口12,所述qbh光纤接口12用于连接光纤4,所述外壳11内至少具有两组准直透镜,一组为双凸面透镜13,位于激光接头1中光路的下游,一组为弯月形透镜14,位于激光接头1中光路的上游,即弯月形透镜14位于双凸面透镜13的前方,入射激光经所述弯月形透镜14准直后,再射入所述双凸面透镜13中,被所述双凸面透镜13再次准直,双凸面透镜13和弯月形透镜14具有不同的准直方向,以从至少两个不同的方向对激光进行准直,提高激光的光学性能。
28.请参照图2,所述弯月形透镜14曲率半径小的弯曲面为所述弯月形透镜14的出射面,朝向所述双凸面透镜13,即弯月形透镜14朝向双凸面透镜13弯曲,双凸面透镜13和弯月形透镜14之间可以具有间距,间距的大小与双凸面透镜13和弯月形透镜14的焦距相关。
29.弯月形透镜14与qbh光纤接口12之间的距离远大于弯月形透镜14与双凸面透镜13之间的距离,所述激光接头1外壳11的外侧壁上可以设置多个散热片,激光在准直之前,其光子可能会打在外壳11的内壁上,导致外壳11温度较高,若不进行及时散热,可能会具有一定的危险性,通过设置所述散热片可以帮助外壳11进行散热,同时能够将外壳11的各种光学仪元件和其他零部件保持在适宜的温度范围内,确保所述激光接头1能够正常工作。
30.振镜系统3连接控制器,以执行控制器的命令改变射入的激光的轨迹或者光路,从而在工件5上打出设定图案或者形状的标志。请参照图2,振镜系统3的一端连接远心消色差扫描物镜4,一端连接定位模组2,振镜系统3出射的激光通过远心消色差扫描物镜4射在工件5上,远心消色差扫描物镜4可以使工件5上的标志深浅均匀一致,确保打标效果。振镜系统3也可以采用常规的振镜系统,在此不做赘述。
31.定位模组2用于采集待打标的工件5图像,以通过图像对工件5进行定位。请参照图2,所述定位模组2位于所述振镜系统3和激光接头1之间,所述定位模组2包括反射可见光、投射激光的选择透镜21,还包括与所述选择透镜21的反射面212对应的成像镜头22和与所述成像镜头22连接的相机23。所述选择透镜21位于所述激光接头1与所述振镜系统3的光路上,自所述激光接头1出射的准直后的激光可透过所述选择透镜21射入所述振镜系统3,以被振镜系统3改变轨迹或者光路。远心消色差扫描物镜4对准工件5,从而工件5发射的可见光和红外光等可依次通过远心消色差扫描物镜4、振镜系统3、选择透镜21的反射面212进入成像镜头22,而后在相机23中成像,进而通过坐标比对为工件5定位或者确定打标原点。可见光和红外光不能从选择透镜21中透过,但能被选择透镜21反射。所以选择透镜21的一面为透射面211,朝向所述激光接头1,激光从透射面211射入并透过所述选择透镜21进入所述振镜系统3,所以选择透镜21的另一面为反射面212,同时面向所述振镜系统3和所述成像镜头22,所以选择透镜21倾斜设置,优选倾斜角度为45
°
。
32.请参照图2,在本实施例中,所述选择透镜21与所述振镜系统3和激光接头1同轴设置,从而工件5的图像与激光束焦点同轴,使得对工件5定位或者原点定位的绝对位置精度可以达到0.02mm以上,与软件配合使用可以完全克服振镜温漂带来的加工位置误差。
33.请参照图2,所述成像镜头22和相机23共轴线,所述成像镜头22所在轴线和所述激光接头1所在轴线垂直。所述成像镜头22可以为ccd成像镜头,所述相机23可以为ccd相机,优选所述成像镜头22的镜筒的长度大于壳体24沿所述成像镜头22轴线方向的长度。
34.请参照图2,所述定位模组2还包括壳体24,所述选择透镜21位于所述壳体24内部,所述成像镜头22固定在所述壳体24上,所述选择透镜21位于所述壳体24内部空间的对角线上,且被所述壳体24内部空间的对角支撑。优选选择透镜21完全覆盖该对角线,从而可以防止激光绕过选择透镜21射入振镜系统3,同时防止可见光和红外光等绕过选择透镜21射入激光接头1,从而保证激光质量和确保各元器件的安全和寿命。
35.请参照图3,所述激光接头1与定位模组2可拆卸地连接,所述定位模组2和振镜系统3可拆卸地连接,从而可以便于单独更换任一独立单元。
36.在不冲突的情况下,本文中上述实施例及实施例中的特征可以相互结合。
37.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。