1.本发明涉及道路环保技术领域,具体为一种全自动生态循环树叶自动清理车。
背景技术:
2.落叶是大自然的规律,不同树种落叶时节也不一样,尤其进入秋末冬初时节,绿化树木的叶子纷纷掉落,城区绿化带里聚集了不少枯枝败叶,杂草落叶不仅是某些害虫病菌的越冬场所,在干燥多风的冬季还易发生火灾。为此,环卫部门和园林绿化部门每年都要出动大量环卫工人行动,清理路面和绿化带落叶,尽量减少落叶积存,近年来,随着科技创新的不断深入,马路扫地车种类越来越多,该技术极大的减轻了环卫工人的工作强度。然而目前马路扫地车主要是为了汽车的安全运行清理落叶,故仅限应用于宽广的马路作业,而针对于人行道的树叶自动清理车却鲜有涉及,属于市场空缺地带;原因在于人行道上的杂物和碎石较多,不易对落叶进行分拣收集,并且,人行道上的行人较多,对于落叶自动清理车的自主避障以及安全运行也提出了更高的要求。
技术实现要素:
3.本发明的目的在于提供了一种全自动生态循环树叶自动清理车,可以对落叶和土壤区域进行快速有效的识别,并且能够实现自主避障、自主规划运行路线。
4.为实现上述目的,本发明提供如下技术方案:一种全自动生态循环树叶自动清理车,包括清理车本体,所述清理车本体包括落叶收集装置、切割粉碎装置、碎叶排出装置以及用于驱动所述清理车本体前进的底盘驱动装置;
5.所述落叶收集装置包括落叶收集箱和安装在所述落叶收集箱顶部的吸收管,所述落叶收集箱内设有一倾斜设置的第一过滤筛网,所述第一过滤筛网的低端设置在吸收管的正下方,所述落叶收集箱位于第一过滤网高端的一侧设置有用于抽走所述落叶收集箱内气体的真空泵;
6.所述吸收管包括设置在所述吸收管一端的吸收头以及设置在所述吸收管内的第一电控阀,所述第一电控阀用于控制吸收管内部流通通道的连通和截止;所述吸收管上靠近吸收头的一侧安装有用于识别落叶的落叶识别模块,所述落叶识别模块配置有落叶识别策略,所述落叶识别策略为当落叶识别模块识别到落叶时,控制第一电控阀开启以使吸收管内部流通通道连通,当落叶识别模块识别到非落叶时,控制第一电控阀关断以使吸收管内部流通通道截止;
7.所述切割粉碎装置包括切割箱和切割组件,用于对落叶进行切割粉碎,所述落叶收集箱的一侧设有推叶机构,所述推叶机构动作时,将落叶收集箱内的落叶推入切割箱内;所述碎叶排出装置包括设置在所述切割箱下方的碎叶储纳箱以及与设置在所述碎叶储纳箱一侧的排出管。
8.优选的,所述碎叶排出装置还包括与排出管相连接的排出口以及设置在所述排出管内的第二电控阀,所述排出管上靠近排出口的一侧设有用于识别土壤区域的土壤识别模
块,所述土壤识别模块配置有落叶排放策略,所述落叶排放策略为当土壤识别模块识别到土壤时,控制第二电控阀开启以使排出管内部流通通道连通,当土壤识别模块识别到非土壤时,控制第二电控阀关断以使排出管内部流通通道截止。
9.优选的,所述吸收管包括设置在落叶收集箱顶部的固接部以及与所述固接部柔性连接的吸收段,所述吸收段的另一端与吸收头相连接,且所述吸收段上靠近吸收头的一侧安装有红外传感器,所述红外传感器配置有第一检测阈值,所述落叶收集箱的一侧设有伸缩驱动机构,所述伸缩驱动机构的驱动端与吸收段铰接连接,且所述伸缩驱动机构的伸缩方向与清理车本体的前进方向相垂直;所述伸缩驱动机构与第一控制器电连接,所述第一控制器配置有避障策略,所述避障策略为当所述红外传感器检测到第一检测阈值内存在障碍物时,控制伸缩驱动机构回缩以使吸收段靠近收集箱,当所述红外传感器检测到第一检测阈值内不存在障碍物时,控制伸缩驱动机构伸出以使吸收段远离收集箱。
10.优选的,所述固接部包括与落叶收集箱顶部相连通的竖直段和与竖直段相连接的过滤段,所述过滤段设置为向远离竖直段方向延伸,且沿延伸方向向下倾斜设置,所述吸收段设置有用于收集碎石的第二收集箱,且所述第二收集箱与吸收段的连接处设有第二过滤网。
11.优选的,所述落叶识别模块识别落叶的方法包括:
12.s1、颜色识别步骤,包括匹配有第一阈值的颜色识别算法,
13.获取图像识别区域,利用颜色识别算法计算图像识别区域与预存的落叶特征数据库的颜色相似度,将颜色相似度大于第一阈值的区域识别为特征区域;
14.s2、轮廓识别步骤,包括匹配有第二阈值的轮廓识别算法,
15.获取特征区域,利用轮廓识别算法计算特征区域与预存的落叶特征数据库的轮廓相似度,将轮廓相似度大于第二阈值的区域识别为落叶区域。
16.优选的,所述土壤识别模块配置有土壤识别策略,所述土壤识别策略匹配有第四阈值,所述土壤识别策略包括获取图像识别区域,利用颜色识别算法计算图像识别区域与预存的土壤特征数据库的颜色相似度,将颜色相似度大于第四阈值的区域识别为土壤区域。
17.优选的,所述清理车本体还包括主控器,所述底盘驱动装置包括安装底板,所述安装底板的下方设有转动轮,所述转动轮上固定安装有驱动转动轮转动的第二伺服电机,所述第二伺服电机与主控器电连接,所述安装底板内设有用于调整转动轮转动方向的避障控制机构。
18.优选的,所述避障控制机构包括与主控器电连接的障碍物识别模块和路径规划模块,所述障碍物识别模块包括沿清理车本体的前进方向设置的测距传感器组件,用于检测清理车本体沿前进方向的障碍物;所述路径规划模块包括一预存的城市电子地图数据库,所述路径规划模块配置有路径规划策略,所述路径规划策略包括获取清理车本体的初始位置信息和前进方向信息,从城市电子地图数据库中调取出相应的初始路径,根据障碍物识别模块反馈的信息对初始路径进行优化。
19.优选的,所述避障控制机构还包括与主控器电连接的同步传动机构,所述同步传动机构包括伺服电机、与伺服电机输出轴固定连接的主动齿轮、与主动齿轮啮合连接的行星齿轮组,所述行星齿轮组通过传动轴与转动轮相连接,用于带动转动轮水平转动以调整
转动轮的转动方向。
20.优选的,所述碎叶排出装置还包括设置在碎叶储纳箱远离排出管一侧的鼓风装置,用于向碎叶储纳箱内鼓入气体,所述排出管上安装有雾化机构,用于向排出管内提供加湿气体,且所述加湿气体的喷射方向与排出管的延伸方向相垂直;所述落叶收集装置的下方设有用于收集第一过滤筛网过滤出的沙石的碎石收集箱,所述碎石收集箱包括一支撑框和设置在所述支撑框内部且与所述支撑框滑动连接的抽拉箱;所述碎石收集箱的下方设有一储水箱,所述雾化机构通过第一水泵与储水箱相连通,用于通过储水箱向雾化机构供水。
21.与现有技术相比,本发明的有益效果是:
22.本发明通过在落叶收集箱内设置有第一过滤筛网,且第一过滤筛网自吸收管一侧向真空泵方向向上倾斜设置,可以使得一部分碎石在移动过程中落至碎石收集箱内,实现了落叶和碎石的有效分离,并且通过设置用于对落叶进行切割粉碎的切割粉碎装置和碎叶排出装置,将收集后的落叶就地处理,播撒在土壤中作为肥料,实现了落叶的生态处理。
23.通过设置落叶识别模块,落叶识别模块配置有落叶识别方法,落叶识别方法首先通过颜色识别步骤确定特征区域,可以过滤掉大部分没有落叶的区域,减小了数据运算量,提高了处理效率;其次在通过轮廓识别步骤对特征区域进行二次处理以确定落叶区域,提高了处理精度。
24.本发明通过在落叶收集箱顶部设置沿远离竖直段方向向下倾斜延伸设置的过滤段,且所述过滤段与吸收段之间形成第一夹角,由于第一夹角的存在,使得吸收管内的落叶、碎石以及空气在由吸收段向过滤段过渡的过程中发生流向的转变,使得一部分碎石会直接沿吸收管内壁向下滑落或者由于在过滤段发生碰撞而落至第二收集箱内。
25.通过在固接部铰接吸收段,且设置第一气缸驱动吸收段向远离或靠近收集箱的方向移动,可以对人行横道上狭窄空隙之间的落叶进行清理。
26.通过设置路径规划模块可以自主规划路线并根据障碍物识别模块反馈的信息对初始路径进行优化。
附图说明
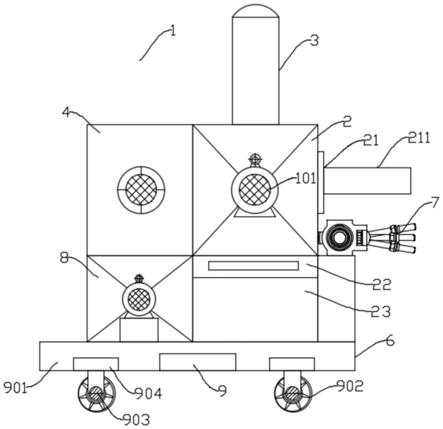
27.图1为本发明一种全自动生态循环树叶自动清理车的主视结构示意图;
28.图2为本发明一种全自动生态循环树叶自动清理车的左视结构示意图;
29.图3为本发明中图2的内部结构示意图;
30.图4为本发明一种全自动生态循环树叶自动清理车中落叶收集箱与储水箱连接的结构示意图;
31.图5为本发明一种全自动生态循环树叶自动清理车的第二种实施例。图中:1、清理车本体;2、落叶收集箱;21、推叶机构;210、推板;211、电动气缸;22、碎石收集箱;221、支撑框;222、抽拉箱;23、储水箱;201、第一过滤筛网;202、真空泵;203、通风网;3、吸收管;301、吸收头;302、落叶识别模块;303、竖直段;304、过滤段;305、吸收段;3051、第一电控阀;306、红外传感器;4、切割箱;401、切割组件;4011、定刀组;4012、动刀组;4013、驱动转轴;4014、第一电机;5、雾化机构;6、底盘驱动装置;7、测距传感器组件;8、碎叶储纳箱;801、排出管;8011、第二电控阀;802、鼓风装置;803、排出口;804、土壤识别模块;9、主控器;901、安装底板;902、转动轮;903、第二伺服电机;904、同步传动机构;10、第一气缸;11、第二收集箱;12、
第二过滤网。
具体实施方式
32.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
33.如图1-图4所示,本发明提供的第一种实施例,一种全自动生态循环树叶自动清理车,包括清理车本体1,所述清理车本体1包括落叶收集装置、碎叶排出装置、用于对落叶进行切割粉碎的切割粉碎装置和用于驱动清理车本体1前进的底盘驱动装置6;
34.所述落叶收集装置用于收集路面的落叶,包括落叶收集箱2、安装在落叶收集箱2顶部一侧且与落叶收集箱2内部相连通的吸收管3以及安装在落叶收集箱2上远离吸收管3一侧的真空泵202,落叶收集装置还包括设置在真空泵202一侧的通风网203,用于对落叶和碎石进行阻隔。
35.所述落叶收集箱2内设有第一过滤筛网201,所述第一过滤筛网201自吸收管3一侧向真空泵202方向向上倾斜设置,落叶和碎石由远离真空泵202的一侧进入落叶收集箱2,然后在风力的作用下逐渐向真空泵202方向移动,在向真空泵202方向移动的过程中,第一过滤筛网201是逐渐向上倾斜的,使得处于第一过滤筛网201上的砂石颗粒在重力作用下向远离真空泵202的一侧滚动,在滚动的过程中,从第一过滤筛网201上开设的筛孔中掉落至碎石收集箱22中。
36.所述吸收管3的一端设有吸收头301,所述吸收管3上靠近吸收头301的一些安装有用于识别落叶的落叶识别模块302。
37.所述切割粉碎装置包括切割箱4,所述切割箱4安装在落叶收集箱2上与真空泵202相邻的一侧且与所述落叶收集箱2内部相连通;
38.所述碎叶排出装置设置在所述切割粉碎装置的底部,且与所述切割粉碎装置内部相连通,所述碎叶排出装置包括排出管801和安装在排出管801上的雾化机构5,用于将切割粉碎后的碎叶进行湿化处理后排出;
39.所述避障控制机构包括与主控器电连接的障碍物识别模块和路径规划模块,所述障碍物识别模块包括沿清理车本体1的前进方向设置的测距传感器组件7,测距传感器组件7包括多个测量范围不同的测距传感器,用于全方面检测清理车本体1沿前进方向的障碍物,所述路径规划模块包括一预存的城市电子地图数据库,所述路径规划模块配置有路径规划策略,所述路径规划策略包括获取清理车本体的初始位置信息和前进方向信息,从城市电子地图数据库中调取出相应的初始路径,根据障碍物识别模块反馈的信息对初始路径进行优化。
40.所述吸收管3包括与落叶收集箱2顶部相连通的固接部以及与所述固接部柔性连接的吸收段305,柔性连接部分可以采用柔性橡胶管,所述吸收段305的另一端与吸收头301相连接,所述吸收段305上靠近吸收头301的一侧安装有用于检测障碍物的红外传感器,所述伸缩驱动机构包括第一气缸,所述第一气缸的驱动端与吸收段305铰接连接,用于驱动吸收段305向远离或靠近收集箱的方向移动,可以对人行横道上狭窄空隙之间的落叶进行清
理,当吸收管3遇到障碍物时,红外传感器会发送信息至主控器9,主控器9控制第一气缸缩回,避免发生碰撞。
41.优选的,所述落叶识别模块302配置有落叶识别方法,所述落叶识别方法包括:
42.s1、颜色识别步骤,包括匹配有第二阈值的颜色识别算法,
43.获取图像识别区域,利用颜色识别算法计算图像识别区域与预存的落叶特征数据库的颜色相似度,将颜色相似度大于第二阈值的区域识别为特征区域;
44.s2、轮廓识别步骤,包括匹配有第三阈值的轮廓识别算法,
45.获取特征区域,利用轮廓识别算法计算特征区域与预存的落叶特征数据库的轮廓相似度,将轮廓相似度大于第三阈值的区域识别为落叶区域。
46.通过设置落叶识别模块302,落叶识别模块302配置有落叶识别方法,落叶识别方法首先通过颜色识别步骤确定特征区域,可以过滤掉大部分没有落叶的区域,减小了数据运算量,提高了处理效率;其次在通过轮廓识别步骤对特征区域进行二次处理以确定落叶区域,提高了处理精度。
47.优选的,所述吸收段305内设有第一电控阀3051,用于控制吸收段305内部流通通道的连通和截止;所述排出管801上设有第二电控阀8011,用于控制排出管801内部流通通道的连通和截止。第一电控阀3051和第二电控阀8011均与主控器9电连接,用于通过主控器9控制第一电控阀3051和第二电控阀8011的开通和关断,由于真空泵202的启动和关断均会有时间延迟,当检测到不是落叶的物体时,无法立即关断,所以会导致吸收进异物,影响设备的正常运行;通过采用主控器9控制第一电动阀来控制吸收段305内部流通通道的连通和截止,动作速度快,延时小,动作更准确。鼓风装置802包括鼓风机,由于鼓风机的启动和关断也均会有时间延迟,当检测到非土壤区域时,无法立即关断,所以会导致碎叶随意排放,对环境造成影响;通过采用主控器9控制第二电动阀来控制控制排出管801内部流通通道的连通和截止,动作速度快,延时小,动作更准确。
48.优选的,所述落叶收集装置远离切割箱4的一侧设有推叶机构21,所述推叶机构21包括与收集箱内壁滑动连接的推板210,所述推板210与电动气缸211的驱动端相连接,用于将落叶由收集箱推入切割箱4内。
49.优选的,所述碎叶排出装置包括碎叶储纳箱8以及安装在碎叶储纳箱8远离排出管801一侧的鼓风装置802,所述鼓风装置802与碎叶储纳箱8内部连通,用于向碎叶储纳箱8内鼓入空气;所述切割粉碎装置包括安装在切割箱4内用于对落叶进行粉碎切割的切割组件401;所述切割组件401包括固定安装在切割箱4内的定刀组4011和安装在驱动转轴4013上通过驱动转轴4013带动旋转的动刀组4012;第一电机4014固定在切割箱4上,用于带动驱动转轴4013进行旋转。
50.优选的,所述落叶收集装置的下方设有用于收集第一过滤筛网201过滤出的沙石的碎石收集箱22,所述碎石收集箱22包括一支撑框221和设置在所述支撑框221内部且与所述支撑框221滑动连接的抽拉箱222;所述碎石收集箱22的下方设有一储水箱23,所述雾化机构5通过第一水泵与储水箱23相连通,用于通过储水箱23向雾化机构5供水;通过雾化机构5对碎叶进行加湿处理后再排除,可以避免尘土飞扬对环境造成影响。
51.优选的,所述碎叶排出装置包括与排出管801相连接的排出口803,所述排出管801上靠近排出口803的一侧设有用于识别土壤区域的土壤识别模块804,所述土壤识别模块
804配置有土壤识别策略,所述土壤识别策略包括获取图像识别区域,利用颜色识别算法计算图像识别区域与预存的土壤特征数据库的颜色相似度,将颜色相似度大于第四阈值的区域识别为土壤区域。
52.优选的,所述清理车本体1还包括主控器9,所述底盘驱动装置6包括安装底板901,所述安装底板901的下方设有用于带动清理车本体1进行移动的转动轮902,所述安装底板901内设有用于调整转动轮902转动方向的避障控制机构,所述转动轮902上固定安装有用于控制转动轮902进行转动的第二伺服电机903,所述第二伺服电机903与主控器9电连接,采用伺服电机对转动轮902进行控制,可以提高运行的准确性。
53.优选的,所述路径规划模块包括一预存的城市电子地图数据库,所述路径规划模块配置有路径规划策略,所述路径规划策略包括获取清理车本体1的位置,并从城市电子地图数据库中调取出相应的初始路径,根据障碍物识别模块反馈的信息对初始路径进行优化;所述避障控制机构包括与主控器9电连接的同步传动机构904,所述同步传动结构包括伺服电机、与伺服电机输出轴固定连接的主动齿轮、与主动齿轮啮合连接的行星齿轮组,所述行星齿轮组通过传动轴与转动轮902相连接,用于带动转动轮902水平移动以调整转动轮902的转动方向。通过设置路径规划模块可以自主规划路线并根据障碍物识别模块反馈的信息对初始路径进行优化。
54.由于通过主控器9控制真空泵202和鼓风机的启动和停止,为了保证设备的长时间运行,在主控器9对真空泵202和鼓风机的驱动控制电路部分选用型号为mc33886dh驱动芯片并联连接(mc33886dh驱动芯片内部设有电压电流保护模块,安全性能高),增强驱动能力的同时且减少导通阻值,减少驱动芯片的发热,可以保证设备的长时间运行。
55.如图5所示,本发明提供的第二种实施例,与第一种不同之处在于,所述固接部包括与落叶收集箱2顶部相连通的竖直段303和与竖直段303相连接的过滤段304,所述过滤段304设置为向远离竖直段303方向延伸,且沿延伸方向向下倾斜设置,吸收段305还设置有用于收集碎石的第二收集箱11,第二收集箱11与吸收段305的连接处设有第二过滤网12,用于过滤掉碎石;所述过滤段304与吸收段305之间形成第一夹角,由于第一夹角的存在,使得吸收管3内的落叶、碎石以及空气在由吸收段305向过滤段304过渡的过程中发生流向的转变,使得一部分碎石会直接沿吸收管3内壁向下滑落或者由于在过滤段304发生碰撞而落至第二收集箱11内。
56.工作原理:主控器9通过第二伺服电机903可以驱动清理车本体1前进,通过控制同步传动机构904可以改变转向;与此同时,识别模块对落叶进行检测,识别到落叶区域后,主控器9控制真空泵202启动开始收集落叶,主控器9可以控制伸缩驱动机构伸缩以对清理车本体1周围及周围间隙中的落叶进行清理,然后主控器9通过控制第一电控阀3051来控制吸收管3的开通和关断进行落叶的收集,不需要频繁的启动真空泵202,提高落叶清理效率,落叶经由落叶收集箱2的第一过滤筛网201进行分离,落叶收集到一定程度后,主控器9驱动电动气缸211控制推板210将落叶收集箱2内的落叶推送至切割箱4内进行切割处理,主控器9控制第一电机4014转动以驱动驱动转轴4013旋转带动动刀进行旋转,完成对落叶的切割粉碎,切割粉碎后的落叶落至碎叶储纳箱8中,主控制器控制土壤识别模块804识别土壤区域,当识别到土壤区域时,主控器9启动鼓风机和雾化机构5,将碎叶经由排出管801进行湿化处理后排出,至此,完成落叶的完整生态处理过程。
57.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
