技术特征:
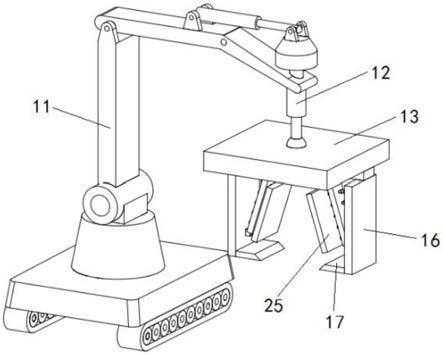
1.一种便于抓手结构调节的码垛机器人,包括机器人本体(11)和设置在机器人本体(11)上的液压杆(12),所述液压杆(12)的输出端连接有固定板(13),其特征在于,所述固定板(13)底部设置有抓手组件;所述抓手组件包括滑动设置在固定板(13)底部的第一连接板(14)和第二连接板(15),所述第一连接板(14)和第二连接板(15)底部均连接有夹板(16),所述夹板(16)底端设置有卡板(17),所述固定板(13)内部设置有电机(18),所述电机(18)的输出端连接有丝杆(19),所述丝杆(19)两端设置有旋向相反的螺纹槽,所述丝杆(19)两端分别设置有与其相配合的第一滑块(20)和第二滑块(21),所述第一滑块(20)和第二滑块(21)底部分别通过连接块与第一连接板(14)和第二连接板(15)连接,两个所述夹板(16)相互靠近的一侧设置有限位组件,所述第一连接板(14)内部设置有用于对限位组件进行调节的调节组件。2.根据权利要求1所述的一种便于抓手结构调节的码垛机器人,其特征在于,所述限位组件包括设置在夹板(16)一侧底端的固定块(23),所述固定块(23)上转动设置有定位板(24),所述第一连接板(14)和第二连接板(15)底部均设置有移动块(22),所述定位板(24)远离固定块(23)的一端与移动块(22)转动连接。3.根据权利要求2所述的一种便于抓手结构调节的码垛机器人,其特征在于,所述调节组件包括设置在第一连接板(14)和第二连接板(15)内部的伸缩杆,所述伸缩杆的输出端设置有调节块,所述调节块底部延伸至第一连接板(14)和第二连接板(15)下方并与移动块(22)连接。4.根据权利要求3所述的一种便于抓手结构调节的码垛机器人,其特征在于,所述定位板(24)上设置有用于对物体进行保护的缓冲组件,所述缓冲组件包括多个滑动设置在定位板(24)上且贯穿定位板(24)的滑杆(26),所述滑杆(26)远离夹板(16)的一端连接有与定位板(24)平行的缓冲板(25)。5.根据权利要求4所述的一种便于抓手结构调节的码垛机器人,其特征在于,所述滑杆(26)远离缓冲板(25)的一端设置有限位块(27),所述滑杆(26)靠近缓冲板(25) 的一端外侧套设有弹簧(28),所述弹簧(28)一端与定位板(24)连接,其远离定位板(24)的一端与缓冲板(25)连接。6.根据权利要求1所述的一种便于抓手结构调节的码垛机器人,其特征在于,所述第一连接板(14)和第二连接板(15)的移动轨迹平行且不重合。7.根据权利要求1所述的一种便于抓手结构调节的码垛机器人,其特征在于,所述卡板(17)远离夹板(16)的一侧为斜面。
技术总结
本实用新型公开了一种便于抓手结构调节的码垛机器人,包括机器人本体和设置在机器人本体上的液压杆,所述液压杆的输出端连接有固定板,所述固定板底部设置有抓手组件;所述抓手组件包括滑动设置在固定板底部的第一连接板和第二连接板,所述第一连接板和第二连接板底部均连接有夹板,所述夹板底端设置有卡板,所述固定板内部设置有电机,所述电机的输出端连接有丝杆,所述丝杆两端设置有旋向相反的螺纹槽,所述丝杆两端分别设置有与其相配合的第一滑块和第二滑块,所述第一滑块和第二滑块底部分别通过连接块与第一连接板和第二连接板连接,通过设置有调节组件,便于对不规则的物体进行限位并抓取,实用性强。实用性强。实用性强。
技术研发人员:周昱 高成玺 梁涛
受保护的技术使用者:普迈科(芜湖)机械有限公司
技术研发日:2021.09.16
技术公布日:2022/1/18
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。