1.本发明涉及第1连接部与第2连接部被连结而成的浮动接头以及使用了浮动接头的加压式的超声波振动接合装置。
背景技术:
2.以往,在薄膜太阳能电池用的基板的上表面配置了集电用的电极线之后将电极线与基板进行接合的工序中,使用了对配置在基板上的电极线执行一边施加压力一边施加超声波的超声波振动处理的加压式的超声波振动接合装置。上述基板以及电极线成为超声波振动处理的接合对象物。
3.加压式的超声波振动接合装置一般具备:超声波接合用头部,执行从超声波接合部施加超声波振动的超声波振动动作;以及加压机构,与超声波接合用头部连结,对超声波接合用头部执行朝向接合对象物加压的加压动作。
4.并且,保持超声波接合用头部的升降框架与加压机构一般经由浮动接头连结。另外,作为以往的浮动接头,例如存在专利文献1或者专利文献2所公开的浮动接头。
5.以往的浮动接头具有安装第1连接对象物的第1连接部以及安装第2连接对象物的第2连接部,第1连接部与第2连接部以能够相对摆动的方式连结。
6.具体而言,以往的浮动接头为,在保持使设置于第1连接部的第1球面连接区域与设置于第2连接部的第2球面连接区域接触的双方球面接触关系的同时,将第1连接部与第2连接部之间进行连结。
7.现有技术文献
8.专利文献
9.专利文献1:国际公开第2016/121018号
10.专利文献2:日本特开2000
‑
320533号公报
技术实现要素:
11.发明要解决的课题
12.如上所述,以往的浮动接头为了在第1连接部与第2连接部之间灵活地保持双方球面接触关系,在第1球面连接区域与第2球面连接区域之间固定为适当的间隙。通过该固定的间隙,在使用了浮动接头的实际动作时,不会对第1连接对象物以及第2连接对象物造成妨碍。
13.此处,考虑在加压式的超声波振动接合装置中采用了以往的浮动接头的情况。
14.在加压式的超声波振动接合装置中,并行地进行基于加压机构的加压动作和基于超声波接合用头部的超声波振动动作。
15.在使用了以往的浮动接头的超声波振动接合装置中,在超声波振动动作的执行中,在第1球面连接区域与第2球面连接区域之间存在上述固定的间隙。因此,在间隙内从动侧(接合头侧)进行弹跳,在第1球面连接区域与第2球面连接区域之间会产生接触状态反复
暂时解除、并再次接触的接触不稳定状态。
16.因此,以往的超声波振动接合装置在超声波振动动作的动作期间中,存在由于产生上述接触不稳定状态而对超声波接合部施加的加压力的变动变大的不良情况。
17.其结果,以往的超声波振动接合装置存在如下的问题点:伴随着上述接触不稳定状态,无法对接合对象物高精度地进行超声波振动动作以及加压力控制。
18.如此,以往的浮动接头存在如下的问题点:由于在使用中产生上述接触不稳定状态,因此对超声波振动接合装置等浮动接头利用装置的动作造成恶劣影响。
19.本发明的目的在于提供一种浮动接头,解决上述那样的问题点,成为在使用中在第1连接部与第2连接部之间不会产生上述接触不稳定状态的构造。
20.用于解决课题的手段
21.本发明的浮动接头为,由第1连接部与第2连接部连结而成,其特征在于,上述第1连接部包括:轴主体;以及接触用球面部,底面与上述轴主体的前端连结,表面为球面状,上述接触用球面部具有底面的一部分从上述轴主体的前端的外周朝外侧突出的底面露出区域,上述第2连接部包括具有接纳上述接触用球面部的凹部空间的框架主体,上述凹部空间收纳上述接触用球面部,上述框架主体具有成为上述凹部空间的底面的平板形状的底面部以及成为上述凹部空间的侧面的侧面部,上述接触用球面部的表面的一部分与上述底面部的一部分接触,上述侧面部具有与上述轴主体对置的轴主体对置区域,上述轴主体能够安装第1连接对象物,上述框架主体能够安装第2连接对象物,上述浮动接头还具备:固定部件,在上述轴主体对置区域中与上述框架主体连结,具有与上述底面露出区域对置的底面对置区域;以及加压调整部件,具有弹性,无间隙地设置在上述接触用球面部的上述底面露出区域与上述固定部件的上述底面对置区域之间,通过上述加压调整部件的弹力,维持上述接触用球面部的表面与上述底面部的一部分接触的接触状态。
22.发明的效果
23.本发明的浮动接头具有上述特征,因此通过适当地设定加压调整部件的弹力,在使用时能够始终保持接触用球面部的表面与凹部的一部分之间的接触状态。
24.因此,本发明的浮动接头为,即使在第1连接部安装第1连接对象物且在第2连接部安装第2连接对象物而使用,也不会产生接触用球面部的表面与凹部的一部分之间的接触状态被解除的接触解除状态。因此,在本发明的浮动接头中,在接触用球面部的表面与凹部的一部分之间不会产生反复成为接触解除状态和接触状态的接触不稳定状态。
25.其结果,本发明的浮动接头能够可靠地消除在使用中由于产生接触解除状态(接触不稳定状态)而引起的不良情况。
26.进而,框架主体的底面部能够形成为平板状,因此本发明的浮动接头与以往的浮动接头相比,不需要将底面部形成为球面状,相应地能够实现装置构成的简化。
27.通过以下的详细说明和附图,本发明的目的、特征、方案以及优点将变得更加明确。
附图说明
28.图1是表示实施方式1的浮动接头的详细构造的截面图。
29.图2是从图中左侧观察图1所示的浮动接头的侧视图。
30.图3是从图中右侧观察图1所示的浮动接头的侧视图。
31.图4是表示图1~图3所示的浮动接头的可动范围的说明图。
32.图5是示意地表示实施方式2的超声波接合装置的正面构造的说明图。
33.图6是示意地表示图5所示的超声波接合装置的侧面构造的说明图。
34.图7是表示实施方式2的超声波接合装置的使用时的前端载荷的经时变化的曲线图。
35.图8是示意地表示作为基础技术的浮动接头的概要构成的说明图。
36.图9是表示图8所示的浮动接头的详细构造的截面图。
37.图10是表示图8以及图9所示的浮动接头的可动范围的说明图。
具体实施方式
38.<基础技术>
39.图8是示意地表示作为基础技术的浮动接头200的概要构成的说明图。如该图所示,作为主要构成要素,浮动接头200具备作为第1连接部的从动侧连结部70、作为第2连接部的驱动侧连结部80、保护罩90以及间隙调整用构造物93。
40.从动侧连结部70与驱动侧连结部80被连结而构成浮动接头200。
41.从动侧连结部70能够安装作为第1连接对象物的被驱动侧部件,驱动侧连结部80能够安装作为第2连接对象物的驱动侧部件。
42.图9是表示图8所示的浮动接头200的详细构造的截面图。在图9中示出xyz直角坐标系。如该图所示,作为主要构成部,从动侧连结部70包括轴主体71以及接触用球面部72。
43.轴主体71形成为圆柱形状,在图9左侧(
‑
z方向侧)的一端部侧具有螺纹部71t。通过轴主体71的螺纹部71t能够对被驱动侧部件进行螺纹固定。
44.另一方面,在轴主体71中,在图9右侧( z方向侧)的另一端部形成有接触用球面部72。在接触用球面部72的底面与轴主体71的另一端部接触的形态下,轴主体71以及接触用球面部72被一体化地形成。此外,接触用球面部72具有底面的一部分从轴主体71的另一端部的外周朝径向外侧突出的底面露出区域72r。
45.作为主要构成要素,驱动侧连结部80包括框架主体81、螺纹部82以及接触用球面构造部件83。
46.框架主体81具有对接触用球面部72的大部分进行收纳的凹部空间s81。并且,在框架主体81内设置有螺纹部82。
47.接触用球面部72在大部分包含在凹部空间s81内的形态下收纳在框架主体81的凹部空间s81内。
48.两个接触用球面构造部件83为,沿着接触用球面部72的顶部侧(比中心点c2靠 z方向侧)以及底面侧(比中心点c2靠
‑
z方向侧)各自的外周,在xy平面中平面观察时形成为环状。在两个接触用球面构造部件83各自中,与接触用球面部72的表面接触的区域成为球面区域83r。两个球面区域83r各自的表面具有与接触用球面部72的球面形状一致的表面形状。
49.因而,两个接触用球面构造部件83为,在球面区域83r与接触用球面部72的表面的一部分保持接触关系的形态下,保持接触用球面部72。
50.框架主体81在内周面具有不隔着接触用球面部72而与轴主体71对置的轴主体对置区域81r,在该轴主体对置区域81r中具有内螺纹构造的内周区域。
51.间隙调整用构造物93形成为在内部具有空洞的圆筒状,侧面的外周区域成为外螺纹构造。轴主体71的一部分存在于间隙调整用构造物93的空洞内。
52.并且,通过在间隙调整用构造物93的外周区域与轴主体对置区域81r的内周区域之间进行螺纹固定,由此不另行使用安装部件就能够将框架主体81与间隙调整用构造物93连结。
53.并且,从框架主体81的表面的一部分到轴主体71设置有保护罩90。保护罩90一般为橡胶材料,具有如下构造:作为盖进行覆盖,罩本身能够变形,通过形成于框架主体81的外周的槽来固定。
54.并且,在基于间隙调整用构造物93进行了间隙调整之后,通过固定用固定螺钉94将间隙调整用构造物93连结于框架主体81。
55.这种构造的浮动接头200为,在接触用球面部72的顶部侧表面的一部分与一方的接触用球面构造部件83的球面区域83r之间保持接触关系(第1球面接触关系),且在接触用球面部72的底面侧表面的一部分与另一方的接触用球面构造部件83的球面区域83r之间保持接触关系(第2球面接触关系)。
56.该第1球面接触关系以及第2球面接触关系为双方以球面形状进行接触的双方球面接触关系。
57.如此,基本技术的浮动接头200为,在与接触用球面部72之间的关系中,一边维持一定间隙一边保持上述第1以及第2球面接触关系,且将从动侧连结部70与驱动侧连结部80进行连结。
58.图10是表示浮动接头200的可动范围的说明图。该图中的中心点c2与图9所示的接触用球面部72的中心点c2一致。如图10所示,浮动接头200的可动范围被设定为允许可动距离δd2(芯偏移量)以及可动角度δg2(倾斜量)的允许范围。可以认为,可动距离δd2为
±
0.5mm左右,可动角度δg2为
±
4度(deg)左右。
59.在框架主体81的凹部空间s81中,在两个接触用球面构造部件83与框架主体81之间设置有间隙s3以及s4。因此,允许接触用球面部72在图10所示的可动范围内移动。
60.如此,通过使用浮动接头200将驱动侧部件与被驱动侧部件进行连结,由此能够将驱动侧部件的动力传递至被驱动侧部件。另外,通过浮动接头200无法将驱动侧部件的旋转动力传递至被驱动侧部件。
61.此处,考虑使用通过浮动接头200将驱动侧部件与被驱动侧部件连结而成的假想装置的情况。如上所述,在两个接触用球面构造部件83与框架主体81之间设置有间隙s3以及s4。
62.因而,在假想装置的执行中,接触用球面部72在上述可动范围内移动。
63.通过在接触用球面部72的顶部侧表面的一部分与一方的接触用球面构造部件83的球面区域83r之间产生间隙,由此产生第1接触解除状态。通过在接触用球面部72的底面侧表面的一部分与另一方的接触用球面构造部件83的球面区域83r之间产生间隙,由此产生第2接触解除状态。
64.在第1以及第2接触关系中的彼此的球面间形成有确定的间隙。因此,关于第1接触
关系,产生接触状态反复暂时解除、且再次接触的第1接触不稳定状态,关于第2接触关系,产生接触状态反复暂时解除、且再次接触的第2接触不稳定状态。
65.因此,在假想装置的动作期间中,由于产生上述第1以及第2接触不稳定状态,因此会产生各种不良情况。尤其是,通过浮动接头200自身无法调整轴向(图9的z方向)的偏移量。此处,所谓轴向是指将连结对象的第1以及第2连接对象物进行连结的方向。
66.如此,使用了以往的浮动接头200的假想装置存在无法消除由于产生第1以及第2接触不稳定状态而导致的不良情况这样的问题点。通过以下所述的实施方式实现了上述问题点的消除。
67.另外,在上述基础技术中,将与浮动接头200的从动侧连结部70连结的第1连接对象物作为被驱动侧部件,将与浮动接头200的驱动侧连结部80连结的第2连接对象物作为驱动8侧部件而进行了说明,但也可以相反。
68.即,也可以将与浮动接头200的从动侧连结部70连结的第1连接对象物作为驱动侧部件,将与浮动接头200的驱动侧连结部80连结的第2连接对象物作为被驱动侧部件。
69.<实施方式1>
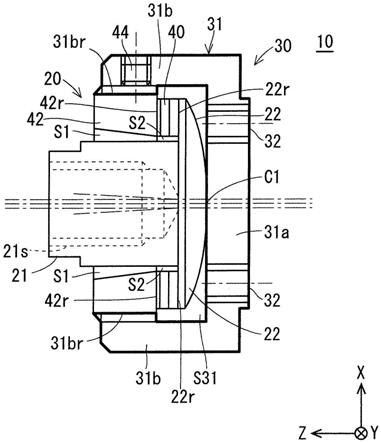
70.图1是表示本发明的实施方式1的浮动接头10的详细构造的截面图。图2是从图中左侧( z方向侧)观察图1所示的浮动接头10的侧视图,图3是从图中右侧(
‑
z方向侧)观察图1所示的浮动接头10的侧视图。在图1~图3中分别记载有xyz直角坐标系。
71.如这些图所示,作为主要构成要素,浮动接头10具备作为第1连接部的驱动侧连结部20、作为第2连接部的从动侧连结部30、加压调整用构造物40以及固定环42。
72.通过将驱动侧连结部20与从动侧连结部30连结来构成浮动接头10。
73.作为主要构成要素,驱动侧连结部20包括轴主体21以及接触用球面部22。
74.轴主体21在内部具有能够供成为第1连接对象物的驱动侧部件进行螺纹固定的螺纹固定用空间21s。在螺纹固定用空间21s内的内周区域的至少一部分设置有内螺纹构造。因而,能够在轴主体21的螺纹固定用空间21s内对驱动侧部件进行螺纹固定。此时,需要在驱动侧部件的外周区域的至少一部分设置外螺纹构造。
75.另一方面,在轴主体21中,在图1右侧(
‑
z方向侧)的另一端部连结有接触用球面部22。即,在接触用球面部22的底面与轴主体21的另一端部接触的形态下,将轴主体21与接触用球面部22之间进行连结。另外,也可以使轴主体21与接触用球面部22一体地构成。此外,接触用球面部22具有底面的一部分从轴主体21的另一端部的外周朝径向外侧突出的底面露出区域22r。
76.作为主要构成要素,从动侧连结部30包括框架主体31。框架主体31的构造为,具有用于收纳接触用球面部22以及轴主体21的前端区域的凹部空间s31。
77.即,框架主体31形成为具有底面的圆筒状,由圆盘状的底面部31a(参照图3)以及以包围凹部空间s31的方式从底面部31a的外周部相对于底面部31a垂直地延伸的侧面部31b构成。
78.如此,框架主体31具有成为凹部空间s31的底面的平板形状的底面部31a以及成为凹部空间s31的侧面的侧面部31b。
79.如图3所示,在框架主体31的底面部31a,以离中心点c1成为等距离的方式,以90度间隔设置有分别贯通底面部31a的4个螺纹孔32。因而,通过使用设置于底面部31a的4个螺
纹孔32将框架主体31与成为第2连接对象物的被驱动侧部件之间进行螺纹固定,由此能够将被驱动侧部件固定于框架主体31。
80.接触用球面部22为,在包含接触用球面部22的顶点(与中心点c1一致的点)的顶点区域与框架主体31的底面部31a的一部分保持接触关系的形态下,收纳在框架主体31的凹部空间s31内。
81.框架主体31的侧面部31b具有不隔着接触用球面部22而与轴主体21对置的轴主体对置区域31br,该轴主体对置区域31br具有内螺纹构造的内周区域。
82.另一方面,成为固定部件的固定环42形成为圆筒状,成为侧面的外周区域成为外螺纹构造。轴主体21的一部分存在于固定环42的空洞内。
83.并且,固定环42在底部的表面(
‑
z方向侧的表面)上具有与接触用球10面部22的底面露出区域22r对置的底面对置区域42r。
84.并且,通过在固定环42的外周区域与框架主体31的轴主体对置区域31br的内周区域之间进行螺纹固定(第1螺纹固定),由此无需另行使用安装部件就能够将框架主体31与固定环42进行连结。
85.在进行第1螺纹固定时,固定环42沿着轴主体对置区域31br朝
‑
z方向移动。因而,通过第1螺纹固定内容,能够调整底面对置区域42r在z方向上的位置。在第1螺纹固定结束时,底面对置区域42r的位置被设定。在第1螺纹固定之后进行第2螺纹固定。
86.即,通过贯通框架主体31的侧面部31b的固定用固定螺钉44,进行将框架主体31的侧面部31b与固定环42连结的第2螺纹固定,能够在通过第1螺纹固定对底面对置区域42r进行了定位的状态下,将框架主体31与固定环42之间牢固地固定。
87.如此,通过第1以及第2螺纹固定,在对底面对置区域42r进行了定位的状态下,将框架主体31与固定环42进行连结。
88.作为加压调整部件的加压调整用构造物40具有弹性,且无间隙地设置在接触用球面部22的底面露出区域22r与固定环42的底面对置区域42r之间。作为加压调整用构造物40,例如可以考虑弹簧。
89.实施方式1的浮动接头10的特征在于,通过加压调整用构造物40的弹力,比较牢固地维持接触用球面部22的顶部区域与框架主体31的底面部31a的一部分接触的单侧球面接触关系。
90.在这种构造的浮动接头10中,保持接触用球面部22的顶部表面与框架主体31的底面部31a的一部分之间接触的接触关系。由于接触用球面部22的表面为球面形状,底面部31a为平板形状,因此该接触关系成为单侧球面接触关系。
91.如此,浮动接头10在接触用球面部22的顶部区域与底面部31a之间保持单侧球面接触关系的同时,将驱动侧连结部20与从动侧连结部30进行连结。
92.因而,通过使用浮动接头10将驱动侧部件与被驱动侧部件进行连结,由此能够将驱动侧部件的动力传递至被驱动侧部件。
93.图4是表示浮动接头10的可动范围的说明图。该图中的中心点c1与图1所示的接触用球面部22的顶点位置一致。如图1所示,浮动接头10的可动范围将可动距离δd1(芯偏移量)以及可动角度δg1(倾斜量)设定为允许范围。可以考虑,可动距离δd1为
±
0.5mm左右,可动角度δg1为
±
4度(deg)左右。
94.在固定环42与轴主体21之间设置有间隙s1,在加压调整用构造物40与轴主体21之间设置有间隙s2。进而,在凹部空间s31内,侧面部31b与接触用球面部22之间也不接触而设置有一定的间隔。
95.因而,允许浮动接头10的接触用球面部22在图4所示的可动范围内移动。
96.浮动接头10将加压调整用构造物40的弹力设定为足够大的值,以便即使接触用球面部22在上述可动范围内移动,也保持上述单侧球面接触关系。
97.另外,作为增大加压调整用构造物40的弹力的方法,在加压调整用构造物40为弹簧的情况下,可以考虑如下方式:充分增大弹簧常数k,或者调整固定环42的底面对置区域42r与底面露出区域22r之间的间隔(紧固间隔)而充分增大弹簧的收缩量x。
98.因而,在将弹簧常数k为一定的弹簧用作为加压调整用构造物40的情况下,通过调整上述紧固间隔,能够可变地设定加压调整用构造物40的弹力。
99.用于设定上述紧固间隔的底面对置区域42r的定位,能够通过上述第1螺纹固定来进行。
100.如此,通过将加压调整用构造物40的弹力设定得足够大,由此在接触用球面部22朝向底面部31a的方向上始终作用比较大的力,因此在浮动接头10的使用中不会产生上述单侧球面接触关系被解除的接触解除状态。因此,在实施方式的浮动接头10的上述单侧球面接触关系中,不会产生反复成为接触解除状态和接触状态的接触不稳定状态。
101.即,在浮动接头10的使用中,始终维持接触用球面部22的顶部区域与底面部31a之间的单侧球面接触关系。
102.因而,在浮动接头10也不会产生轴向(图1~图3的z方向)的偏移量。
103.(效果)
104.如上所述,实施方式1的浮动接头10具备加压调整用构造物40,该加压调整用构造物40具有弹性,且无间隙地设置在接触用球面部22的底面露出区域22r与作为固定部件的固定环42的底面对置区域42r之间。
105.并且,浮动接头10的特征在于,通过加压调整用构造物40的弹力,维持接触用球面部22的顶部区域的表面与底面部31a的一部分接触的单侧球面接触关系。
106.实施方式1的浮动接头10具有上述特征,因此通过适当地设定加压调整用构造物40的弹力,在使用时能够始终维持接触用球面部22的顶部区域的表面与底面部31a的一部分之间的上述单侧球面接触关系。
107.此处,假定如下的浮动接头利用装置:使用实施方式1的浮动接头10,在驱动侧连结部20安装作为第1连接对象物的驱动侧部件,在从动侧连结部30安装作为第2连接对象物的被驱动侧部件。
108.实施方式1的浮动接头10具有上述特征,因此在浮动接头利用装置的使用期间中,不会产生上述单侧球面接触关系被解除的接触解除状态。因此,在实施方式的浮动接头10的上述单侧球面接触关系中不会产生反复成为接触解除状态和接触状态的接触不稳定状态。
109.其结果,实施方式1的浮动接头10能够可靠地消除在浮动接头利用装置的使用中由于产生接触解除状态(接触不稳定状态)而引起的不良情况。
110.并且,接触用球面部22与底面部31a具有上述单侧球面接触关系,底面部31a能够
不形成为球面状而形成为平板状。
111.其结果,实施方式1的浮动接头10与采用了双方球面接触关系的以往的浮动接头相比,能够实现装置构成的简化。
112.此外,框架主体31的侧面部31b起到与图9所示的保护罩90相同的作用,因此在浮动接头10中不需要与保护罩90相当的构成构件。
113.如此,实施方式1的浮动接头10能够采用单侧球面接触关系且不需要与保护罩90相当的构成构件,因此能够相应地实现装置的小型化。
114.其结果,实施方式1的浮动接头10与以往相比,能够将图1~图3所示的成为全长的z方向的长度小型化到以往的1/4左右。
115.并且,在浮动接头10中,框架主体31与固定环42通过固定环42的外周区域(外螺纹构造)与框架主体31的轴主体对置区域31br的内周区域(内螺纹构造)之间的第1螺纹固定,将框架主体31与固定环42之间固定。
116.因此,浮动接头10通过上述第1螺纹固定,能够进行底面对置区域42r在z方向上的定位。
117.进而,在框架主体31与固定环42之间,除了上述第1螺纹固定之外,还通过使用了贯通侧面部31b的固定用固定螺钉44的第2螺纹固定,将框架主体31与固定环42之间固定。
118.因此,浮动接头10能够在进行了底面对置区域42r的定位的状态下,将框架主体31与固定环42之间牢固地固定。
119.并且,浮动接头10能够比较简单地将作为第1连接对象物的驱动侧部件固定在设置于轴主体21内部的螺纹固定用空间21s中。
120.进而,浮动接头10使用分别贯通框架主体31的底面部31a的4个螺纹孔32(至少一个螺纹孔)将框架主体31与作为第2连接对象物的被驱动侧部件之间螺纹固定,由此能够比较简单地固定框架主体31的被驱动侧部件。
121.因而,能够缩短将实施方式1的浮动接头10安装于第1以及第2连接对象物的组装作业的时间。
122.<实施方式2>
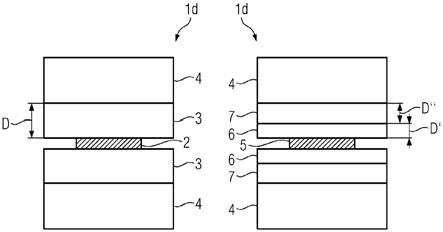
123.图5是示意地表示本发明的实施方式2的超声波振动接合装置100的正面构造的说明图。图6是示意地表示超声波振动接合装置100的侧面构造的说明图。图5以及图6是示意地表示的图,因此各构成要素的构造以及构成要素间的连接方式简化示出。
124.作为主要构成要素,超声波振动接合装置100包括机械框架1、测力传感器3、加压用缸4、实施方式1的浮动接头10、升降框架5、安装工具7、超声波接合用头部6以及工作台60。
125.驱动侧部件包括机械框架1、测力传感器3以及加压用缸4,被驱动侧部件包括升降框架5、安装工具7以及超声波接合用头部6。
126.如图5以及图6所示,在机械框架1上安装有测力传感器3以及加压用缸4。另外,测力传感器3能够测定加压用缸4的加压力。
127.因而,机械框架1、测力传感器3以及加压用缸4成为一起进行移动的驱动侧部件(第1连接对象物)。
128.缸4的活塞杆23的前端部在浮动接头10的螺纹固定用空间21s(参照图1)内被螺纹
固定,由此包括活塞杆23的驱动侧部件与浮动接头10被连结。
129.另一方面,如图6所示,升降框架5具有能够进行螺纹固定的安装区域5a。在安装区域5a中,从升降框架5的下表面到上表面以及设置于底面部31a的4个螺纹孔32(参照图1以及图3),使用未图示的4个外部固定用螺钉进行螺纹固定。
130.其结果,框架主体31与升降框架5被连结,由此浮动接头10与包括升降框架5的被驱动侧部件(第2连接对象物)被连结。
131.在升降框架5的下表面上连结安装工具7,通过该安装工具7来安装转换器8。转换器8与超声波接合用头部6一体化,作为超声波接合用头部6的一部分发挥功能,基于从外部输入的电信号产生向超声波接合用头部6传递的机械振动。
132.因而,升降框架5、超声波接合用头部6(包括转换器8)以及安装工具7成为一起进行移动的被驱动侧部件(第2连接对象物)。
133.作为主要构成要素,超声波接合用头部6包括转换器8以及超声波喇叭16,超声波喇叭16的前端部分成为超声波接合部16a。另外,在转换器8内内置有超声波振子。
134.超声波接合用头部6按照转换器8(超声波振子)以及超声波喇叭16的顺序朝头形成方向(图6中的左方)延伸形成,在超声波喇叭16的前端部具有超声波接合部16a。
135.超声波接合用头部6使转换器8内的超声波振子产生超声波振动uv,并经由超声波喇叭16将超声波振动uv向超声波接合部16a传递,由此执行从超声波接合部16a向接合对象物的施加部施加超声波振动的超声波振动动作。
136.另外,作为接合对象物,例如,如图5以及图6所示,可以考虑载放在工作台60上的太阳能电池板61等。例如,配置在构成太阳能电池板61的玻璃基板上的电极的上表面的规定部位成为超声波振动的施加部。在该情况下,通过超声波接合用头部6的超声波振动动作,能够在该电极的施加部实现电极与玻璃基板之间的超声波接合。
137.此外,测力传感器3对加压用缸4的活塞杆23的加压力进行测定。即,测力传感器3能够对超声波接合部16a的前端部按压太阳能电池板61的加压力即前端载荷(n)进行测定。
138.如上所述,实施方式2的超声波振动接合装置100包括工作台60、超声波接合用头部6、浮动接头10以及加压用缸4。
139.工作台60载放有作为接合对象物的太阳能电池板61。
140.超声波接合用头部6执行从超声波接合部16a施加超声波振动的超声波振动动作。
141.作为加压机构的加压用缸4经由浮动接头10、升降框架5以及安装工具7而与超声波接合用头部6连结,并对超声波接合用头部6执行朝向工作台60侧进行加压的加压动作。
142.在超声波振动接合装置100中,第1连接对象物成为驱动侧部件,第2连接对象物成为被驱动侧部件。
143.如上所述,驱动侧部件包括机械框架1、测力传感器3以及加压用缸4(活塞杆23),被驱动侧部件包括升降框架5、超声波接合用头部6以及安装工具7。
144.并且,加压用缸4的活塞杆23的前端部安装于驱动侧连结部20的轴主体21,升降框架5的安装区域5a安装于框架主体31。
145.因而,追随驱动侧部件中的加压用缸4的活塞杆23的伸缩动作,包括超声波接合用头部6的被驱动侧部件进行移动。
146.图7是表示实施方式2的超声波振动接合装置100的使用时的前端载荷的经时变化
的曲线图。另外,如上所述,所谓前端载荷是指超声波接合部16a的前端部按压太阳能电池板61的力(n)。
147.在该图中,载荷变动l1是实施方式2的超声波振动接合装置100的载荷变动,载荷变动l2是代替浮动接头10而使用了以往的浮动接头的以往的超声波接合装置的载荷变动。以下,为了便于说明,将以往的浮动接头设为图8以及图9所示的浮动接头200。
148.此外,图7表示通过加压用缸4的加压动作设定有147n的前端载荷的情况。
149.另外,在图7中,在加压开始时刻t1(时间0(msec)),成为超声波接合部16a的前端开始与太阳能电池板61的表面接触的时刻。从加压开始时刻t1到接合开始时刻t2(时间20(msec))的期间成为加压区间t10,接合开始时刻t2以后的规定期间成为接合处理区间t20。在加压区间t10中仅执行加压用缸4的加压动作,在接合处理区间t20中并行地进行加压用缸4的加压动作和超声波接合用头部6的超声波振动动作。
150.如图7的载荷过冲
·
下冲范围r1的载荷变动l2所示,在以往的超声波振动接合装置中,产生超过适当载荷范围r10的过冲载荷。
151.根据载荷过冲
·
下冲范围r1内的载荷变动l2推测出:关于在以往的超声波振动接合装置中使用的浮动接头200,在加压区间t10中产生第1以及第2球面接触关系中的第1以及第2接触不稳定状态中的至少一个。
152.另一方面,在实施方式2的超声波振动接合装置100中,载荷过冲
·
下冲范围r1内的载荷变动l1全部处于适当载荷范围r10内。
153.根据图7所示的载荷变动l1推测出:关于在超声波振动接合装置100中使用的浮动接头10,在加压区间t10中未产生单侧球面接触关系被解除的接触解除状态。
154.即,推测出:在加压区间t10中,在浮动接头10中未产生接触用球面部22的顶部区域的表面与框架主体31的底面部31a的一部分之间的单侧球面接触关系被解除的接触解除状态。
155.如图7的超声波接合过冲
·
下冲范围r2的载荷变动l2所示,在以往的超声波振动接合装置中产生低于适当载荷范围r10的下冲载荷。
156.根据超声波接合过冲
·
下冲范围r2内的载荷变动l2推测出:关于浮动接头200,在接合处理区间t20中产生第1以及第2球面接触关系中的第1以及第2接触不稳定状态中的至少一个。进而,作为载荷变动l2的原因,还可以考虑到浮动接头200的构成构件(接触用球面部72、接触用球面构造部件83等)的刚性的影响。
157.另一方面,在实施方式2的超声波振动接合装置100中,超声波接合过冲
·
下冲范围r2全部处于适当载荷范围r10内。
158.根据图7所示的载荷变动l1推测出:在接合处理区间t20中,关于浮动接头10,也未产生单侧球面接触关系被解除的接触解除状态。
159.在几十msec单位的较短时间内执行超声波振动动作,因此重要的是减小前端载荷的变动而使其收敛在适当载荷范围r10内。
160.如图7所示,实施方式2的超声波振动接合装置100能够抑制使用时的前端载荷的变动而使其收敛在适当载荷范围r10内,由此能够高精度地进行超声波接合处理。
161.另一方面,以往的超声波振动接合装置无法适当地抑制使用时的前端载荷的变动,前端载荷超过适当载荷范围r10地变动,因此无法高精度地进行超声波接合处理。
162.此外,在以往的超声波振动接合装置内无法修正载荷变动l2,因此为了修正载荷变动l2而需要设置与浮动接头200独立的平衡配重等载荷控制机构。
163.另外,为了在超声波振动接合装置100的使用中可靠地避免浮动接头10产生接触解除状态,加压调整用构造物40优选具有作为第2连接对象物的被驱动侧部件的重量的2倍以上的弹力。
164.此处,所谓被驱动侧部件的重量是指升降框架5、安装工具7、超声波接合用头部6(包括超声波喇叭16以及转换器8)的总重量。
165.此外,为了在超声波振动接合装置100的使用中可靠地避免浮动接头10产生接触解除状态,作为第2连接对象物的被驱动侧部件的重量优选为500n以下。
166.(效果)
167.实施方式2的超声波振动接合装置100使用实施方式1的浮动接头10,将包括加压用缸4的驱动侧部件与包括超声波接合用头部6的被驱动侧部件进行连结。
168.实施方式1的浮动接头10在超声波振动接合装置100的使用中,不会产生接触用球面部22的顶部区域的表面与底面部31a的一部分之间的单侧球面接触关系被解除的接触解除状态。因此,在实施方式的浮动接头10的上述单侧球面接触关系中,不会产生反复成为接触解除状态和接触状态的接触不稳定状态。
169.因而,在实施方式2的超声波振动接合装置100的超声波振动动作的执行期间中,在作为加压机构的加压用缸4执行加压动作时,与以往的超声波振动接合装置相比,能够有效地抑制对超声波接合部16a的前端施加的前端载荷的变动。
170.其结果,实施方式2的超声波振动接合装置100在通过加压用缸4执行加压动作的同时通过超声波接合用头部6执行超声波振动动作,由此能够对成为接合对象物的太阳能电池板61高精度地进行超声波接合处理。
171.实施方式2的超声波振动接合装置100所使用的浮动接头10的加压调整用构造物40的弹力被设定为满足包括超声波接合用头部6的被驱动侧部件(第2连接对象物)的重量的2倍以上,因此能够可靠地降低对超声波接合部16a的前端施加的前端载荷的变动。
172.实施方式2的超声波振动接合装置100所使用的包括超声波接合用头部的被驱动侧部件的重量为500n以下,因此能够稳定地降低对超声波接合部1216a的前端施加的前端载荷的变动。
173.<其他>
174.另外,在上述实施方式中,将与浮动接头10的驱动侧连结部20连结的第1连接对象物设为包括加压用缸4的驱动侧部件,将与浮动接头10的从动侧连结部30连结的第2连接对象物设为包括超声波接合用头部6的被驱动侧部件进行了说明,但即使相反也能够起到相同效果。
175.即,也可以将与浮动接头10的驱动侧连结部20连结的第1连接对象物设为被驱动侧部件,将与浮动接头10的从动侧连结部30连结的第2连接对象物设为驱动侧部件。
176.但是,需要进行在被驱动侧部件的外周区域的至少一部分设置外螺纹构造,并使外螺纹构造的形态与浮动接头10的螺纹固定用空间21s一致等的各种变更。
177.另外,可以自由地组合各实施方式,或者适当地对各实施方式进行变形、省略。
178.符号的说明
179.1:机械框架;3:测力传感器;4:加压用缸;5:升降框架;6:超声波接合用头部;7:安装工具;10:浮动接头;16:超声波喇叭;16a:超声波接合部;20:驱动侧连结部;21:轴主体;22:接触用球面部;30:从动侧连结部;31:框架主体;32:螺纹孔;40:加压调整用构造物;42:固定环;44:固定用固定螺钉;60:工作台;61:太阳能电池板;s31:凹部空间s31。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。