1.本发明涉及农业机械技术领域,尤其涉及一种应用于丘陵山地的自适应调平的升降作业平台。
背景技术:
2.我国丘陵山地地区果树种植面积占有较大比重,果树在进行田间管理或采摘时,多采用移动式升降作业平台。由于丘陵山地地势多样化,地面起伏不定又具有一定坡度,为提高机器安全性,升降作业平台需具备调平功能。目前,大部分升降作业平台调平功能依靠人工手动操作,依据肉眼观察,精确度不高,且当调平操作不当时,可能会导致平台侧翻,影响生命财产安全。因此急需要研制出一种能够根据地形坡度变化进行自动调平的升降作业平台,以提高作业安全性和稳定性。
技术实现要素:
3.本发明所要解决的技术问题是提供了一种能够根据地形坡度变化进行自动调平的自适应调平的升降作业平台。
4.为解决上述技术问题,本发明的技术方案是:一种自适应调平的升降作业平台,包括机架和作业平台,所述机架下部安装有动力行走机构,其还包括平台倾角检测装置,所述平台倾角检测装置连接有姿态调平控制系统,所述机架上部设置有姿态调平机构,所述作业平台可升降的设置在所述姿态调平机构上,所述姿态调平控制系统连接控制所述姿态调平机构。
5.作为优选的技术方案,所述姿态调平机构包括纵向调平机构,所述纵向调平机构包括所述机架上侧设置的纵向调平机架,所述纵向调平机架的前端设置有前横梁,所述纵向调平机架的后端设置有后横梁,所述机架与前横梁和后横梁之间分别设置有安全锁止装置,所述机架与前横梁和后横梁之间分别设置有纵向调平举升装置,所述姿态调平控制系统连接控制所述纵向调平举升装置。
6.作为优选的技术方案,所述安全锁止装置包括所述机架的前端和后端分别设置有槽口向上的u型槽,所述前横梁放置在机架前端的u型槽内,所述后横梁放置在机架后端的u型槽内,所述机架前端u型槽的上部滑动设置的前锁销,所述机架前端转动设置有前摆臂和前联动转臂,所述前摆臂一端铰接所述前锁销,所述前联动转臂一端抵靠在所述前横梁底部,所述机架后端u型槽的上部滑动设置有后锁销,所述机架后端转动设置有后摆臂和后联动转臂,所述后摆臂一端铰接所述后锁销,所述后联动转臂一端抵靠在所述后横梁底部,所述前摆臂另一端通过拉线连接所述后联动转臂另一端,所述后摆臂另一端通过拉线连接所述前联动转臂另一端,所述前摆臂和后摆臂与所述机架之间分别设置有弹性装置。
7.作为优选的技术方案,各所述u型槽上分别设置有导套,所述前锁销和后锁销通过所述导套滑动设置在所述u型槽上。
8.作为优选的技术方案,所述前横梁和后横梁上分别转动套装有卡箍,各所述纵向
调平举升装置设置在相应的卡箍和机架之间。
9.作为优选的技术方案,所述姿态调平机构还包括横向调平机构,所述纵向调平机架上设置有横向调平机架,所述横向调平机架的两端分别通过横向调平支撑轴与所述纵向调平机架铰接,所述横向调平机架的两侧与纵向调平机架之间分别设置有横向调平举升装置,所述姿态调平控制系统连接控制所述横向调平举升装置。
10.作为优选的技术方案,所述纵向调平举升装置为纵向调平油缸,所述横向调平举升装置为横向调平油缸。
11.作为优选的技术方案,所述姿态调平控制系统包括控制器,所述平台倾角检测装置连接所述控制器,所述控制器连接有比例电磁阀,所述比例电磁阀连接所述纵向调平油缸和横向调平油缸,所述控制器连接有车载管理系统。
12.作为优选的技术方案,所述作业平台通过升降机构可升降的设置在所述姿态调平机构上,所述作业平台上设置有驾驶操控系统,所述驾驶操控系统连接控制所述动力行走机构和升降机构。
13.由于采用了上述技术方案的一种自适应调平的升降作业平台,包括机架和作业平台,所述机架下部安装有动力行走机构,还包括平台倾角检测装置,所述平台倾角检测装置连接有姿态调平控制系统,所述机架上部设置有姿态调平机构,所述作业平台可升降的设置在所述姿态调平机构上,所述姿态调平控制系统连接控制所述姿态调平机构。本发明通过平台倾角检测装置采集作业平台的倾角信号,并实时输送给姿态调平控制系统,姿态调平控制系统首先判断倾角值是否在预设的调平范围内,如果在范围内,则根据编定的控制策略输出控制信号,控制姿态调平机构工作将作业平台倾角值调整到允许值范围内,实现作业平台的自动调平,本发明能够根据地形坡度变化进行自动调平,提高了作业安全性和稳定性。
附图说明
14.以下附图仅旨在于对本发明做示意性说明和解释,并不限定本发明的范围。其中:
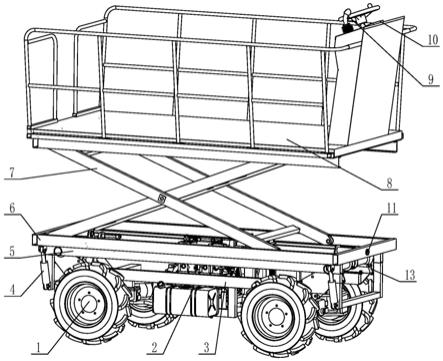
15.图1为本发明的结构示意图;
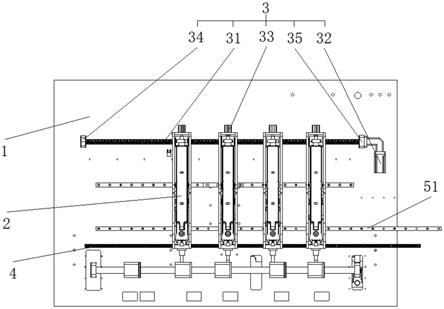
16.图2为本发明纵向调平机构结构图;
17.图3为本发明在下坡地面纵向调平主视图;
18.图4为本发明在上坡地面纵向调平主视图;
19.图5为本发明在倾斜地面横向调平示意图;
20.图6为本发明姿态调平控制系统的原理示意图。
21.图中:1
‑
行走系统;2
‑
动力系统;3
‑
机架;4
‑
横向调平油缸;5
‑
纵向调平机架;6
‑
横向调平机架;7
‑
升降机构;8
‑
作业平台;9
‑
驾驶操控系统;10
‑
姿态调平控制系统;11
‑
横向调平支撑轴;12
‑
u型槽;13
‑
前联动转臂;131
‑
后联动转臂;14
‑
前锁销;141
‑
后锁销;15
‑
前摆臂;151
‑
后摆臂;16
‑
拉线;17
‑
弹簧;18
‑
纵向调平油缸;19
‑
前横梁;191
‑
后横梁。
具体实施方式
22.下面参照附图详细描述根据本发明的示例性实施例。这里,需要注意的是,在附图中,将相同的附图标记赋予结构以及功能基本相同的组成部分,并且为了使说明书更加简
明,省略了关于基本上相同的组成部分的冗余描述。
23.如图1所示,一种自适应调平的升降作业平台,包括机架3和作业平台8,所述机架3下部安装有动力行走机构,还包括平台倾角检测装置,所述平台倾角检测装置连接有姿态调平控制系统10,所述机架3上部设置有姿态调平机构,所述作业平台8可升降的设置在所述姿态调平机构上,所述作业平台8可以通过升降机构7可升降的设置在所述姿态调平机构上,升降机构7可以采用液压油缸驱动的剪叉式升降机构7等,所述姿态调平控制系统10连接控制所述姿态调平机构。所述动力行走机构包括行走系统1和动力系统2,其中行走系统1包括轮、转向系统、制动系统等,动力系统2包括发动机或电机、传动系统等,动力系统2也可以采用液压系统驱动的液压马达;所述作业平台8上设置有驾驶操控系统9,所述驾驶操控系统9连接控制所述行走系统1、动力系统2和升降机构7;上述行走系统1、动力系统2和升降机构7以及驾驶操控系统9均为本领域内技术人与所公知的常识,此处不在进行描述。
24.如图1和图2所示,所述姿态调平机构包括纵向调平机构,所述纵向调平机构包括所述机架3上侧设置的纵向调平机架5,所述纵向调平机架5的前端设置有前横梁19,所述纵向调平机架5的后端设置有后横梁191,所述机架3与前横梁19和后横梁191之间分别设置有安全锁止装置,所述机架3与前横梁19和后横梁191之间分别设置有纵向调平举升装置,所述姿态调平控制系统10连接控制所述纵向调平举升装置。所述安全锁止装置包括所述机架3的前端和后端分别设置有槽口向上的u型槽12,u型槽12可与机架3焊接,所述前横梁19放置在机架3前端的u型槽12内,所述后横梁191放置在机架3后端的u型槽12内,这样前横梁19和后横梁191在u型槽12内时与u型槽12构成半铰接,所述机架3前端u型槽12的上部滑动设置的前锁销14,所述机架3前端转动设置有前摆臂15和前联动转臂13,前摆臂15和前联动转臂13均通过转轴转动安装在机架3上,所述前摆臂15一端铰接所述前锁销14,所述前联动转臂13一端抵靠在所述前横梁19底部,所述机架3后端u型槽12的上部滑动设置有后锁销141;所述机架3后端转动设置有后摆臂151和后联动转臂131,后摆臂151和后联动转臂131也通过转轴转动安装在机架3上,所述后摆臂151一端铰接所述后锁销141,所述后联动转臂131一端抵靠在所述后横梁191底部,所述前摆臂15另一端通过拉线16连接所述后联动转臂131另一端,所述后摆臂151另一端通过拉线16连接所述前联动转臂13另一端,拉线16通过导管安装在所述机架3上。所述前摆臂15和后摆臂151与所述机架3之间分别设置有弹性装置,弹性装置可以采用弹簧17,给前锁销14和后锁销141提供滑动插入u型槽12所需的力。可采用机架3前端和后端的两侧分别设置有所述u型槽12,且位于机架3同侧的两所述u型槽12与所述机架3之间分别设置有安全锁止装置。优选的各所述u型槽12上分别设置有导套,可采用导套焊接在u型槽12上,所述前锁销14和后锁销141通过导套滑动设置在所述u型槽12上,提高了前锁销14和后锁销141的稳定性。并且前联动转臂13和后联动转臂131均可采用v形臂,且前联动转臂13的一臂抵靠在所述前横梁19底部而另一臂连接后摆臂151。所述前横梁19和后横梁191上分别转动套装有卡箍,各所述纵向调平举升装置设置在相应的卡箍和机架3之间,纵向调平举升装置工作举升时,卡箍可在前横梁19或后横梁191上转动。可采用在各u型槽12上设置销孔,前锁销14和后锁销141分别滑动设置在相应u型槽12上的销孔内,且前锁销14和后锁销141分别滑动贯穿相应u型槽12的槽腔。
25.如图1和图5所示,所述姿态调平机构还包括横向调平机构,所述横向调平机构包括所述纵向调平机架5上设置有横向调平机架6,所述横向调平机架6的两端分别通过横向
调平支撑轴11与所述纵向调平机架5铰接,所述横向调平机架6的两侧与纵向调平机架5之间分别设置有横向调平举升装置,可以采用横向调平机架6前后端的两侧分别与纵向调平机架5之间分别设置有横向调平举升装置,所述姿态调平控制系统10连接控制所述横向调平举升装置。
26.如图1和图6所示,所述纵向调平举升装置为纵向调平油缸18,所述横向调平举升装置为横向调平油缸4。所述姿态调平控制系统10包括控制器,所述平台倾角检测装置连接所述控制器,所述控制器连接有比例电磁阀,所述比例电磁阀连接所述纵向调平油缸18和横向调平油缸4,所述控制器连接有车载管理系统。平台倾角检测装置可以采用倾角传感器,包括纵向倾角传感器和横向倾角传感器,并且可以设置在作业平台8上。通过车载管理系统可进行工作模式切换、参数设定等用户指令输入和平台姿态信息显示;倾角传感器采集作业平台8倾角信号,并实时输送给控制器,控制器首先判断各倾角值是否在调平范围内,如果在范围内,则控制器根据编定的控制策略,输出控制信号,通过比例电磁阀控制纵向调平油缸18或横向调平油缸4伸缩,将作业平台8倾角值调整到允许值范围内,实现作业平台8自动调平。
27.如图2、图3和图4所示,本发明进行作业平台8姿态调平:
28.未进行调平动作,纵向倾角传感器和横向倾角传感器采集作业平台8倾角信号,并实时输送给控制器,控制器判断各倾角值不在调平范围内,纵向调平油缸18和横向调平油缸4均不伸出,此时纵向调平机架5的前横梁19和后横梁191在机架3的u型槽12内,限制前联动转臂13和后联动转臂131向上摆动的自由度,调整拉线16,使前锁销14和后锁销141分别拉出u型槽12,两纵向调平油缸18分别与机架3和前横梁19上卡箍、后横梁191上卡箍铰接,利用液压锁功能,使机架3和纵向调平机架5处于相对固定状态。
29.纵向调平动作,当设备下坡前侧向下倾斜时,纵向倾角传感器采集作业平台8倾角信号,并实时输送给控制器,控制器判断纵向倾角值在调平范围内,通过比例电磁阀控制机架3前侧纵向调平油缸18工作伸出,带动调纵向调平机架5绕后横梁191摆动,前横梁19脱离机架3前端u型槽12,前联动转臂13向上摆动的自由度得到释放,后摆臂151在弹簧17的作用下带动后锁销141滑动,插入u型槽12内,将后横梁191挡在机架3后端u型槽12内,变成全铰接,以阻止后横梁191脱出u型槽12,防止由于机架3后侧纵向调平油缸18工作伸出而导致的作业平台8失稳。反之,当设备上坡后侧向下倾斜时,控制器通过比例电磁阀控制机架3后侧纵向调平油缸18工作伸出,带动调纵向调平机架5绕前横梁19摆动,后横梁191脱离机架3前端u型槽12,后联动转臂131向上摆动的自由度得到释放,前摆臂15在弹簧17的作用下带动前锁销14滑动插入u型槽12内,将前横梁19挡在机架3前端u型槽12内,变成全铰接,以阻止前横梁19脱出u型槽12,防止由于机架3前侧纵向调平油缸18工作伸出而导致的作业平台8失稳,实现纵向调平。
30.横向调平动作,当设备在横向倾斜地面时,横向倾角传感器采集作业平台8倾角信号,并实时输送给控制器,控制器判断横向倾角值在调平范围内,通过比例电磁阀控制横向调平油缸4伸缩,使横向调平机架6绕铰接点摆动,实现横向姿态调整。
31.如上所述,已经在上面具体地描述了本发明的实施例,但是本发明不限于此。本领域的技术人员应该理解,可以根据设计要求或其他因素进行各种修改、组合、子组合或者替换,而它们在所附权利要求及其等效物的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。