1.本发明涉一种焊接路径随动调节装置,并不能限制本发明。
背景技术:
2.埋弧焊机的焊接枪头在行走过程中,整对着焊缝的中心实施焊接,是保证焊接质量的基础要求之一。不论是焊车式的行走机构还是门架式的行走机构,在焊前准备阶段,都要进行焊接枪头的路径确认工作。
3.焊车式埋弧焊机,其行走轨道独立,直接铺在钢板上,用钢尺测量轨道至焊缝的距离,由于轨道重量较轻,人工调整轨道位置即可完成路径确认工作。门架式与悬挂式相结合的埋弧焊机,行走轨道悬空与焊机、旋臂一体,是通过空车行走,直接确认枪头与焊缝的对心情况。
4.通过空车行走的方式来确认焊接枪头的路径,缺点是调整时间偏长,效率较低。本发明可以不需要空车行走,即完成路径确认工作,提高作业效率。
技术实现要素:
5.为了解决行走机构为可移动门架式与悬挂式相结合的埋弧焊机,其行走轨道是悬空的,在焊前准备阶段,需要通过空车试走,来确保焊接行走路线沿着焊缝进行。空车试走过程,虽然是通过遥控器即可调整,但由于是大型设备,仍需要花费不少时间问题,本发明提供了一种焊接路径随动调节装置。
6.为了实现上述目的,本发明采用了如下技术方案:包括机架,机架的顶部设置有横移小车,所述横移小车的内部设置有转臂,所述转臂远离横移小车的一端设置有连接机构,所述连接机构的内部设置有移动机构,所述移动机构的内部设置有焊接机构,所述移动机构的侧端设置有光学校准机构,且光学校准机构位于焊接机构的前方。
7.作为上述技术方案的进一步描述:
8.所述机架包括横板,所述横板的顶部开设有通槽,所述横板的顶部开设有滚轮槽,所述滚轮槽的内部设置有横杆,所述横杆的数量存在多个,所述滚轮槽的数量为两个,且滚轮槽位于通槽的两侧,所述横移小车位于滚轮槽的内部,所述横板的上表面固定连接有纵移门架,所述纵移门架的数量为两个,且纵移门架位于通槽的两端。
9.作为上述技术方案的进一步描述:
10.所述横移小车包括车体、轮子,所述车体的底部开设有通孔,且通孔的位置与通槽的位置相对应,所述车体的内部固定连接有第一电机,所述第一电机的输出端通过转轴与轮子固定连接,所述轮子的数量为四个,且轮子位于车体的两侧,所述轮子位于滚轮槽的内部,所述车体的内底部固定连接有第二电机,所述第二电机的输出端与转臂固定连接,且转臂穿过通孔至机架的下方与连接机构固定连接。
11.作为上述技术方案的进一步描述:
12.所述连接机构包括连接柱,且连接柱的上表面与转臂的底部固定连接,所述连接
柱的内部开设有安置孔,所述安置孔的内部设置有移动机构,所述连接柱的顶部开设有螺纹孔,且螺纹孔与安置孔相连通,所述螺纹孔的内部螺纹连接有螺栓。
13.作为上述技术方案的进一步描述:
14.所述移动机构包括移动柱,所述移动柱位于安置孔的内部,所述移动柱的顶部开设有连接孔,所述连接孔的数量存在多个,且连接孔的位置与螺纹孔的位置相对应,所述移动柱的一端固定连接有夹持块,且夹持块位于连接机构的外侧,所述夹持块到的内部开设有夹持孔,且夹持孔的内部设置有焊接机构,所述夹持块的侧壁开设有转动槽,所述转动槽的内部活动连接有光学校准机构。
15.作为上述技术方案的进一步描述:
16.所述焊接机构包括焊机,且焊机位于夹持孔的内部,所述焊机的底部固定连接有枪头,且枪头为竖直向下设置。
17.作为上述技术方案的进一步描述:
18.所述光学校准机构包括激光灯,所述激光灯的外表面固定连接有转动柱,且转动柱位于转动槽的内部,所述激光灯的输出端固定连接有灯头,所述灯头的内部开设有十字槽。
19.作为上述技术方案的进一步描述:
20.所述焊接机构与光学校准机构之间设置有电源线。
21.本发明的有益效果:
22.1、通过追加光学校准机构安装在枪头前,使得装置在使用时能够通过激光灯发射出十字光标,通过十字光标来模拟枪头的行走方向,可以通过更加直观、快速的方式向作业人员反馈出焊接枪头的行走轨迹,并且激光具备高方向性,且激光的发散角度小,可以实现较高的行走路线模拟能力;
23.2、通过连接机构与移动机构,使得装置在使用时能够通过调整移动柱在安置孔内部的位置,来调整装置整体的长度,进而便于装置对不同角度的钢板进行焊接作业,便于装置进行使用;
24.3、通过转动槽、转动柱,使得装置在进行使用时能够通过旋转光学校准机构来调整激光灯的照射角度,便于装置通过十字光标来模拟枪头的行走方向;
25.4、通过灯头、十字槽,使得装置在进行使用时能够通过激光灯发出激光照射从而形成十字光标,便于装置发出十字光标来模拟枪头的行走方向更加直观、快速的方式向作业人员反馈出焊接枪头的行走轨迹。
附图说明
26.为了更清楚地表示一种焊接路径随动调节装置,示出以下附图;
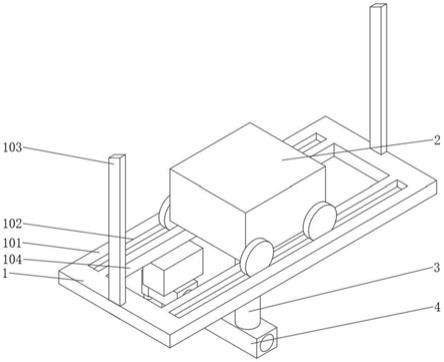
27.图1为本发明的第一视角整体结构示意图;
28.图2为本发明的第二视角整体结构示意图;
29.图3为本发明的整体结构侧视图;
30.图4为本发明的横移小车内部结构剖视图;
31.图5为本发明的焊接机构内部结构剖视图;
32.图6为本发明的灯头结构示意图。
33.其中附图中的标号;
34.1、机架;101、横板;102、滚轮槽;103、纵移门架;104、通槽;2、横移小车;201、车体;202、通孔;203、第一电机;204、轮子;205、第二电机;3、转臂;4、连接机构;401、连接柱;402、安置孔;403、螺纹孔;404、螺栓;5、移动机构;501、移动柱;502、连接孔;503、夹持块;504、夹持孔;505、转动槽;6、焊接机构;601、焊机;602、枪头;7、光学校准机构;701、转动柱;702、激光灯;703、灯头;704、十字槽。
35.请参考附图1、2、3,包括机架1,机架1的顶部设置有横移小车2,横移小车2的内部设置有转臂3,转臂3远离横移小车2的一端设置有连接机构4,连接机构4的内部设置有移动机构5,移动机构5的内部设置有焊接机构6,移动机构5的侧端设置有光学校准机构7,且光学校准机构7位于焊接机构6的前方,通过追加光学校准机构7安装在焊接机构6前,使得装置在使用时能够发射出十字光标,通过十字光标来模拟枪头602的行走方向,可以通过更加直观、快速的方式向作业人员反馈出焊接枪头602的行走轨迹,且十字光标长度在300mm长度。
36.请参考附图1、2、4,机架1包括横板101,横板101的顶部开设有通槽104,横板101的顶部开设有滚轮槽102,滚轮槽102的内部设置有横杆,横杆的数量存在多个,滚轮槽102的数量为两个,且滚轮槽102位于通槽104的两侧,横移小车2位于滚轮槽102的内部,横板101的上表面固定连接有纵移门架103,纵移门架103的数量为两个,且纵移门架103位于通槽104的两端,将纵移门架103与龙门架进行连接使得装置能够纵向移动,横移小车2包括车体201、轮子204,车体201的底部开设有通孔202,且通孔202的位置与通槽104的位置相对应,车体201的内部固定连接有第一电机203,第一电机203的输出端通过转轴与轮子204固定连接,轮子204的数量为四个,且轮子204位于车体201的两侧,轮子204位于滚轮槽102的内部,车体201的内底部固定连接有第二电机205,第二电机205的输出端与转臂3固定连接,且转臂3穿过通孔202至机架1的下方与连接机构4固定连接,使得装置在进行使用时能够通过横移小车2控制装置进行横向移动,并且在横移小车2内部的第二电机205的作用下使得装置能够控制焊接机构6进行旋转,便于装置对钢板进行焊接。
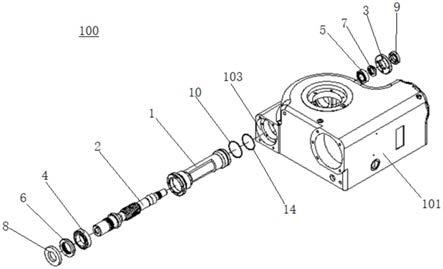
37.请参考附图1、5,连接机构4包括连接柱401,且连接柱401的上表面与转臂3的底部固定连接,连接柱401的内部开设有安置孔402,安置孔402的内部设置有移动机构5,连接柱401的顶部开设有螺纹孔403,且螺纹孔403与安置孔402相连通,螺纹孔403的内部螺纹连接有螺栓404,移动机构5包括移动柱501,移动柱501位于安置孔402的内部,移动柱501的顶部开设有连接孔502,连接孔502的数量存在多个,且连接孔502的位置与螺纹孔403的位置相对应,使得装置在使用时能通过旋转螺栓404将连接柱401与移动柱501进行连接,便于移动柱501进行固定,移动柱501的一端固定连接有夹持块503,且夹持块503位于连接机构4的外侧,夹持块503到的内部开设有夹持孔504,且夹持孔504的内部设置有焊接机构6,夹持块503的侧壁开设有转动槽505,转动槽505的内部活动连接有光学校准机构7,使得装置在进行使用时能够通过调整移动柱501在安置孔402内部的位置,来调整装置整体的长度,进而便于装置对不同角度的钢板进行焊接作业,便于装置进行使用。
38.请参考附图1、5、6,焊接机构6包括焊机601,且焊机601位于夹持孔504的内部,焊机601的底部固定连接有枪头602,且枪头602为竖直向下设置,光学校准机构7包括激光灯702,激光灯702的外表面固定连接有转动柱701,且转动柱701位于转动槽505的内部,激光
灯702的输出端固定连接有灯头703,灯头703的内部开设有十字槽704,焊接机构6与光学校准机构7之间设置有电源线,从焊机601设备上引出电源线,确保光学校准机构7始终与枪头602保持同时工作,使得装置在进行使用时能够通过转动槽505、转动柱701,使得装置在进行使用时能够通过旋转光学校准机构7来调整激光灯702的照射角度,便于装置通过十字光标来模拟枪头602的行走方向,通过灯头703、十字槽704,使得装置在进行使用时能够通过激光灯702发出激光照射从而形成十字光标,便于装置发出十字光标来模拟枪头602的行走方向更加直观、快速的方式向作业人员反馈出焊接枪头602的行走轨迹。
39.工作原理:使用时,将纵移门架103与龙门架上的移动机构进行连接,使得装置能够在龙门架上的移动机构的作用下进行前后纵向移动,通过追加光学校准机构7安装在枪头602前,使得装置在使用时能够通过激光灯702发射出十字光标,通过十字光标来模拟枪头602的行走方向,可以通过更加直观、快速的方式向作业人员反馈出焊接枪头602的行走轨迹,并且激光具备高方向性,且激光的发散角度小,可以实现较高的行走路线模拟能力,通过连接机构4与移动机构5,使得装置在使用时能够通过调整移动柱501在安置孔402内部的位置,来调整装置整体的长度,进而便于装置对不同角度的钢板进行焊接作业,便于装置进行使用,通过转动槽505、转动柱701,使得装置在进行使用时能够通过旋转光学校准机构7来调整激光灯702的照射角度,便于装置通过十字光标来模拟枪头602的行走方向,通过灯头703、十字槽704,使得装置在进行使用时能够通过激光灯702发出激光照射从而形成十字光标,便于装置发出十字光标来模拟枪头602的行走方向更加直观、快速的方式向作业人员反馈出焊接枪头602的行走轨迹。
40.本领域技术人员在考虑说明书及实践这里发明的公开后,将容易想到本发明的其它实施方案。本技术旨在涵盖本发明的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本发明的一般性原理并包括本发明未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本发明的真正范围和精神由下面的权利要求指出。
41.应当理解的是,诸如“第一”和“第二”等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。本发明并不局限于上面已经描述并在附图中示出的精确结构,并且可以在不脱离其范围进行各种修改和改变。本发明的范围仅由所附的权利要求来限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。