1.本公开涉及用于驱动显示装置的数据驱动装置、方法和系统。
背景技术:
2.显示面板包括以矩阵形式布置的多个像素,并且各个像素包括红色(r)子像素、绿色(g)子像素、蓝色(b)子像素等。各个子像素根据在图像数据中所包括的灰度值发光,以在显示面板上显示图像。
3.图像数据从被称为定时控制器的数据处理装置发送到被称为源极驱动器的数据驱动装置。图像数据以数字值发送,并且数据驱动装置将图像数据转换成模拟电压以驱动各个子像素。
4.由于图像数据单独地或独立地指示用于各个像素的各个灰度值,所以随着布置在显示面板中的像素数量的增加,图像数据量增加。另外,随着帧速率增加,在单位时间内要发送的图像数据量增加。
5.由于近来显示面板具有高得多的分辨率,所以布置在显示面板中的像素数量和帧速率增加。另外,为了处理增加的图像数据量,显示装置中的数据发送速率增加。
6.另一方面,在数据处理装置和数据驱动装置的初始驱动中,即,紧接在向显示装置施加电力之后,需要设置用于数据处理装置和数据驱动装置之间的数据发送的高速通信环境。
7.这里,由于在使用高速数据通信进行用于配置高速通信环境的处理的情况下,可能存在由于高速而导致的错误,所以使用具有比高速数据通信的通信频率低的通信频率的低速数据通信进行用于配置高速通信环境的处理。
8.在与数据处理装置进行低速数据通信之后,即,进行用于配置高速通信环境的处理之后,数据驱动装置通过时钟训练来同步通信时钟。
9.在完成时钟训练之后,数据处理装置可以在高速数据通信中向数据驱动装置发送图像数据信号,使得数据驱动装置可以在显示面板上显示图像。即,显示装置可以正常工作。
10.另一方面,数据处理装置可以在显示装置操作时从数据驱动装置接收锁定信号,并且通过识别锁定信号的电压电平来检查数据驱动装置的操作状态。
11.这里,锁定信号可以具有高电平或低电平。当锁定信号具有高电平时,数据处理装置可以确定为数据驱动装置的操作状态正常,并且当锁定信号具有低电平时,数据处理装置可以确定为数据驱动装置的操作状态异常。
12.一般而言,在显示装置中,一个数据处理装置与多个数据驱动装置进行通信。
13.为了使数据处理装置顺利地与多个数据驱动装置进行数据通信,数据处理装置需要准确地识别各个数据驱动装置的操作状态。
14.然而,根据传统技术,数据处理装置使用锁定信号而仅确定数据驱动装置的操作状态是正常还是异常,但是不能准确地确定各个数据驱动装置的操作状态。
技术实现要素:
15.在此背景下,本公开的一方面提供一种在显示装置操作时,数据驱动装置响应于数据处理装置的请求而向数据处理装置提供内部操作状态的技术。
16.为此,在一方面,本公开提供了一种数据驱动装置的驱动方法,包括:图像接收步骤,用于通过第一通信线从数据处理装置接收图像数据信号;第一发送步骤,用于通过第二通信线发送预定电平的锁定信号;命令接收步骤,用于在接收所述图像数据信号时从所述数据处理装置接收状态应答命令信号;以及第二发送步骤,用于通过所述第二通信线发送操作状态信号而不是预定电平的锁定信号,所述操作状态信号包括表示所述数据驱动装置内部的操作状态的操作状态数据。
17.在所述图像接收步骤之前,所述方法可以还包括以下步骤:根据所述图像数据信号的频率来对用于接收所述图像数据信号的电路中所包括的时钟恢复电路的设置值进行优化。
18.优化设置值可以包括所述时钟恢复电路中所包括的振荡器的参考电流值、参考电压值和增益调整值中的任何一个,并且所述操作状态数据可以包括所述优化设置值。
19.在所述图像接收步骤之前,所述方法可以还包括以下步骤:根据所述第一通信线的特性来对用于接收所述图像数据信号的电路中所包括的均衡器的设置值进行优化。
20.优化设置值可以包括所述均衡器的增益水平,并且所述操作状态数据可以包括所述优化设置值。
21.在所述命令接收步骤中,所述数据驱动装置可以按帧接收所述图像数据信号,并且可以在一帧和另一帧之间的帧控制区间中接收所述状态应答命令信号。
22.所述数据驱动装置可以从紧接在接收到所述状态应答命令信号之后起直到另一帧控制区间开始为止,重复进行第二发送步骤n次,并且随后通过所述第二通信线再次发送预定电平的锁定信号,其中n是自然数。
23.在所述第二发送步骤中,所述数据驱动装置可以使用manchester码来将所述操作状态数据编码成所述操作状态信号。
24.所述操作状态信号可以包括前导、布置在所述前导之后的开始位、布置在所述开始位之后的所述操作状态数据、以及布置在所述操作状态数据之后的结束位,其中,在所述前导中,与任何一个二进制数字相对应的manchester码被重复m次,m是等于或大于2的自然数。
25.在所述第二发送步骤中,所述数据驱动装置可以针对所述操作状态信号和从外部装置接收到的预定电平的锁定信号进行与运算,并且通过所述第二通信线发送通过所述与运算所获得的操作状态信号。
26.在另一方面,本公开提供一种数据驱动装置,包括:通信电路,用于通过第一通信线从数据处理装置接收图像数据信号,在接收所述图像数据信号时从所述数据处理装置接收状态应答命令信号,并且将所述状态应答命令信号处理成状态应答命令信息;锁定控制电路,用于在所述通信电路接收所述图像数据信号时,输出第一电平的锁定信号;以及逻辑门,用于在从所述通信电路接收到所述状态应答命令信息时,通过与输出端子连接的第二通信线发送与所述通信电路的操作状态有关的操作状态信号而不是所述第一电平的锁定信号。
27.所述数据驱动装置还可以包括信号选择电路,所述信号选择电路用于在仅接收到所述第一电平的锁定信号时向所述逻辑门输出所述第一电平的锁定信号,以及在接收到所述操作状态信号和所述第一电平的锁定信号时向所述逻辑门输出所述操作状态信号。
28.所述逻辑门可以是与门,而且在通过输入端子从所述信号选择电路接收到所述操作状态信号并且通过与另一输入端子连接的第二通信线从外部装置接收到所述第一电平的锁定信号时,所述与门可以针对所述操作状态信号和来自外部装置的所述锁定信号进行与运算,并且通过与所述输出端子连接的第二通信线发送通过所述与运算所获得的操作状态信号。
29.所述逻辑门可以是与门,而且在通过输入端子从所述信号选择电路接收到所述操作状态信号并且通过与另一输入端子连接的第二通信线从外部装置接收到第二电平的锁定信号时,所述与门可以针对所述操作状态信号和来自外部装置的所述锁定信号进行与运算,并且通过与所述输出端子连接的第二通信线发送通过所述与运算所获得的来自外部装置的锁定信号。
30.所述数据驱动装置还可以包括通信控制电路。所述通信电路可以包括时钟恢复电路和均衡器,并且所述通信控制电路可以在所述通信电路接收到所述图像数据信号之前根据所述图像数据信号的频率对所述时钟恢复电路中所包括的振荡器的设置值进行优化,以及根据所述第一通信线的特性对所述均衡器的增益水平进行优化。
31.所述操作状态信号可以包括所述振荡器的设置值和所述均衡器的增益水平。
32.在又一方面,本公开提供一种显示装置驱动系统,包括:第一数据驱动装置,用于通过第1
‑
1通信线接收第一图像数据信号,通过第2
‑
1通信线发送第一锁定信号,并且在接收所述第一图像数据信号时接收到状态应答命令信号的情况下,通过第2
‑
1通信线发送用于表示所述第一数据驱动装置内部的操作状态的操作状态信号而不是所述第一锁定信号;第二数据驱动装置,用于通过第1
‑
2通信线接收第二图像数据信号,生成第二锁定信号,通过第2
‑
1通信线接收所述第一锁定信号,针对所述第一锁定信号和所述第二锁定信号进行逻辑运算,通过第2
‑
2通信线发送通过逻辑运算所获得的信号,通过第2
‑
1通信线接收所述操作状态信号,对所述操作状态信号和所述第二锁定信号进行逻辑运算,并且通过第2
‑
2通信线发送通过逻辑运算所获得的操作状态信号;以及数据处理装置,用于通过第1
‑
1通信线发送所述第一图像数据信号,通过第1
‑
2通信线发送所述第二图像数据信号,通过第1
‑
1通信线发送所述状态应答命令信号,并且随后通过第2
‑
2通信线接收所述操作状态信号。
33.在通过第1
‑
1通信线发送所述状态应答命令信号时,所述数据处理装置可以通过第1
‑
2通信线发送电平固定命令信号以固定所述第二锁定信号的电平。
34.在通过第1
‑
2通信线接收到所述电平固定命令信号时,所述第二数据驱动装置可以将所述第二锁定信号的电平固定为高。
35.在所述锁定信号被固定为高电平的状态下接收所述第二图像数据信号时存在错误的情况下,所述第二数据驱动装置可以将所述第二锁定信号的电平改变为低,针对所述操作状态信号和低电平的第二锁定信号进行逻辑运算,并且通过第2
‑
2通信线发送通过逻辑运算所获得的低电平的信号。
36.如上所述,根据本公开,数据处理装置可以检查多个数据驱动装置的操作状态,并且因此,数据处理装置可以有效率地管理多个数据驱动装置。
附图说明
37.通过以下结合附图的详细描述,本公开的以上和其它方面、特征和优点将变得更加明显,其中:
38.图1是根据实施例的显示装置的配置图;
39.图2是示意性地示出根据实施例的系统的配置的图;
40.图3是具体示出根据实施例的系统的配置的图;
41.图4是示意性地示出根据实施例的高速通信电路的配置的图;
42.图5和图6是示出根据实施例的通过第一通信线的数据发送序列的图;
43.图7和图8是示出根据实施例的通过第二通信线的数据发送序列的图;
44.图9是示出根据实施例的数据驱动装置的编码方法的图;以及
45.图10是示出根据实施例的数据驱动装置发送和接收数据的处理的流程图。
具体实施方式
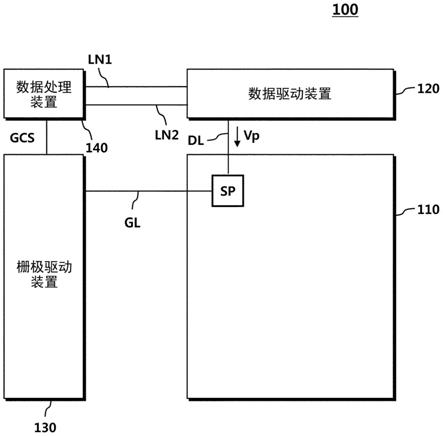
46.图1是根据实施例的显示装置的配置图。
47.参考图1,显示装置100可以包括显示面板110、数据驱动装置120、栅极驱动装置130和数据处理装置140。
48.在显示面板110上,可以布置多个数据线dl和多个栅极线gl,并且也可以布置多个像素。像素可以包括多个子像素sp。子像素可以是红色(r)子像素、绿色(g)子像素、蓝色(b)子像素和白色(w)子像素。像素可以包括rgb子像素sp、rgbg子像素sp或rgbw子像素sp。
49.数据驱动装置120、栅极驱动装置130和数据处理装置140用于生成用于在显示面板110上显示图像的信号。
50.栅极驱动装置130可以通过栅极线gl提供栅极驱动信号,诸如接通电压或关断电压等。当接通电压的栅极驱动信号被提供给子像素sp时,子像素sp与数据线dl连接。当关断电压的栅极驱动信号被提供给子像素sp时,子像素sp与数据线dl断开连接。栅极驱动装置130可以称为栅极驱动器。
51.数据驱动装置120可以通过数据线dl向子像素sp提供数据电压v
p
。通过数据线dl所提供的数据电压v
p
可以根据栅极驱动信号而被提供给子像素sp。数据驱动装置120可以被称为源极驱动器(sd
‑
ic)。
52.数据驱动装置120可以包括至少一个集成电路,并且该至少一个集成电路可以以带式自动接合(tab)方式或玻璃覆晶(cog)方式连接到显示面板110的接合垫,直接形成在显示面板110上,或者根据情况集成在显示面板110上。另外,数据驱动装置120可以以薄膜覆晶(cof)的类型来形成。
53.根据实施例,当向数据驱动装置120和数据处理装置140提供驱动电压vcc时,数据驱动装置120可以与数据处理装置140进行低速通信,以在它们之间建立高速通信环境。
54.换句话说,数据驱动装置120可以在低速通信中从数据处理装置140接收用于高速通信环境的设置值数据信号。这里,数据驱动装置120可以接收图5中的cfg数据区间中的设置值数据信号。根据实施例,被包括在设置值数据信号中的设置值数据可以包括数据驱动装置120中所包括的均衡器的基本增益水平、加扰信息、行极性信息等。这里,加扰信息可以包括与当数据处理装置140将数据发送到数据驱动装置120时数据是否被加扰有关的信息,
以及行极性信息可以包括指示像素的第一行的极性的信息。
55.数据驱动装置120可以使用设置值数据建立高速通信环境并存储设置值数据。这里,数据驱动装置120可以将设置值数据存储在其中所包括的存储器电路(未示出)中。数据驱动装置120的存储器电路(未示出)可以包括寄存器和随机存取存储器(ram)中的至少一个。
56.另一方面,数据驱动装置120可以在布置在cfg数据区间之前的前导区间中从数据处理装置140接收用于低速通信的时钟模式,并进行用于低速通信的时钟训练。数据驱动装置120可以通过第一通信线ln1接收用于低速通信的设置值数据信号和时钟模式。这里,时钟训练可以是使数据驱动装置120的内部时钟与通信时钟同步的处理。
57.当用于低速通信的时钟训练正常完成时,数据驱动装置120可以向数据处理装置140发送指示通信状态稳定的第一电平的锁定信号。这里,第一电平可以是高电平(高电压电平)。第一电平的锁定信号可以通过第二通信线ln2来发送。
58.如上所述,在进行用于低速通信的时钟训练并通过与数据处理装置进行低速通信来建立高速通信环境之后,数据驱动装置120可以与数据处理装置进行高速通信。
59.例如,在图5的显示模式区间中,数据驱动装置120可以通过与数据处理装置140的高速通信从数据处理装置140接收图像数据信号。这里,可以通过第一通信线ln1发送或接收图像数据信号。
60.在接收图像数据信号之前,数据驱动装置120可以根据高速通信的频率(即图像数据信号的频率)来优化高速通信电路中的时钟恢复电路的设置值,以接收图像数据信号。
61.数据驱动装置还可以根据第一通信线ln1的特性来优化高速通信电路中所包括的均衡器的设置值。
62.下面将参考图5和图6就这方面进行详细描述。
63.数据处理装置140可以向栅极驱动装置130和数据驱动装置120提供控制信号。例如,数据处理装置140可以向栅极驱动装置130发送栅极控制信号gcs以启动扫描,向数据驱动装置120发送图像数据信号,并发送数据控制信号dcs以控制数据驱动装置120向各个子像素sp提供数据电压v
p
。数据处理装置140可以被称为定时控制器(t
‑
con)。
64.图2是示意性地示出根据实施例的系统的配置的图。
65.参考图2,系统可以包括至少一个数据处理装置140和多个数据驱动装置120a、120b、120c、120d。
66.数据处理装置140可以布置在第一印刷电路板pcb1上,并通过第一通信线ln1和第二通信线ln2与多个数据驱动装置120a、120b、120c、120d连接。
67.第一通信线ln1和第二通信线ln2可以经由第一印刷电路板pcb1和第二印刷电路板pcb2到达多个数据驱动装置120a、120b、120c、120d。第一印刷电路板pcb1和第二印刷电路板pcb2可以通过由柔性材料制成的第一膜fl1彼此连接。第一通信线ln1和第二通信线ln2可以经由第一膜fl1从第一印刷电路板pcb1延伸到第二印刷电路板pcb2。
68.各个数据驱动装置120a、120b、120c、120d可以以薄膜覆晶(cof)的方式布置在第二膜fl2上。第二薄膜fl2可以是用于连接第二印刷电路板pcb2和面板110的由柔性材料制成的支持基板。第一通信线ln1和第二通信线ln2可以分别从第二印刷电路板pcb2经由第二膜fl2延伸到数据驱动装置120a、120b、120c、120d。
69.第一通信线ln1可以以1:1的方式连接数据处理装置140和多个数据驱动装置120a、120b、120c、120d中的各个。换句话说,第一通信线ln1的连接可以是点对点的方式。
70.第二通信线ln2可以连接相邻的两个数据驱动装置120a、120b、120c、120d,或者连接数据驱动装置120d与数据处理装置140,而不在面板上与第一通信线ln1重叠。例如,第一数据驱动装置120a可以通过第二通信线ln2与第二数据驱动装置120b连接,并且第二数据驱动装置120b可以通过第二通信线ln2与第三数据驱动装置120c连接。这里,第二数据驱动装置120b和第三数据驱动装置120c可以分别与不同的第二印刷电路板pcb2连接,并且因此,布置在第二数据驱动装置120b与第三数据驱动装置120c之间的第二通信线ln2可以经由第二印刷电路板pcb2、第一膜fl1、第一印刷电路板pcb1、第一膜fl1和第二印刷电路板pcb2来连接第二数据驱动装置120b与第三数据驱动装置120c。第三数据驱动装置120c可以通过第二通信线ln2与第四数据驱动装置120d连接,并且第四驱动装置120d可以通过第二通信线ln2与数据处理装置140连接。第二通信线ln2的这种连接方式可以是级联方式。
71.数据处理装置140和多个数据驱动装置120a、120b、120c、120d可以通过第一通信线ln1和第二通信线ln2进行相互通信。
72.以此方式,数据处理装置140可以通过第一通信线ln1将图像数据信号分别发送到数据驱动装置120a、120b、120c、120d。
73.根据实施例,数据处理装置140可以向数据驱动装置发送状态应答命令信号,以在向多个数据驱动装置120a、120b、120c、120d发送图像数据信号的同时检查数据驱动装置的状态。
74.在多个数据驱动装置120a、120b、120c、120d中,通过第一通信线ln1接收状态应答命令信号的数据驱动装置可以生成与其内部操作状态有关的操作状态信号,并通过第二通信线ln2将该操作状态信号发送到数据处理装置140。
75.下面将就这方面进行详细描述。
76.图3是具体示出根据实施例的系统的配置的图。
77.参考图3,将描述数据驱动装置120的配置和系统的配置。
78.数据驱动装置120(即,多个数据驱动装置120a、120b、120c、120d中的各个)可以包括低速通信电路310、高速通信电路320、锁定控制电路330、通信控制电路340、编码器350、信号选择电路360和逻辑门370。
79.低速通信电路310可以通过第一通信线ln1与数据处理装置140进行低速通信。这里,低速通信的频率可能比高速通信的频率低(具体地,至少1/10)。例如,如果高速通信的频率是几千兆bps,则低速通信的频率可以是几兆bps。
80.低速通信电路310可以从数据处理装置140接收用于低速通信的时钟模式,并进行用于低速通信的时钟训练。这里,低速通信电路310可以在图5的前导区间中接收用于低速通信的时钟模式。
81.在完成用于低速通信的时钟训练之后,低速通信电路310可以输出指示低速通信状态的高电平(高电压电平)的低速通信状态信号cmd_l。
82.在完成用于低速通信的时钟训练之后,低速通信电路310可以从数据处理装置140接收用于高速通信环境的设置值数据信号。
83.低速通信电路310可以将设置值数据信号处理成设置值数据(例如,将信号解码成
数据或排列数据),并将设置值数据发送到将在下面描述的通信控制电路340。这里,低速通信电路120可以在图5中的cfg数据区间中接收设置值数据信号。
84.当向数据驱动装置120施加电力时,可以通过通信控制电路340的控制来启动低速通信电路310。当与低速通信相对应的图5中的命令模式区间完成时,可以通过通信控制电路340的控制来停用低速通信电路310。
85.高速通信电路320可以通过第一通信线ln1与数据处理装置140进行高速通信。通过高速通信,高速通信电路320可以从数据处理装置140接收图像数据信号。例如,高速通信电路320可以在图5的显示模式区间中接收图像数据信号。
86.另外,高速通信电路320可以将图像数据信号处理成图像数据。
87.如图4所示,高速通信电路320可以包括均衡器410、时钟恢复电路420和并行化电路430。
88.另一方面,高速通信电路320可以在接收图像数据信号之前(例如,在图5中的预时钟训练(pre
‑
clock training)区间中)从数据处理装置140接收具有高速通信频率(即图像数据信号的频率)的测试信号。
89.高速通信电路320可以通过利用通信控制电路340的控制按每个预定时间ts改变时钟恢复电路420中所包括的振荡器的设置值,来训练测试信号中所包括的时钟(图5中的tr_clk)。
90.高速通信电路320还可以在接收图像数据信号之前(例如,在图6中的eq训练区间中)从数据处理装置140接收eq训练信号。这里,eq训练信号可以包括如图6所示的每时间区间重复的训练序列。训练序列可以包括具有预定电平(例如,高电平)的空白信号(blank signal)h、布置在空白信号之后的eq时钟训练信号eqcp、以及布置在eq时钟训练信号eqcp之后的eq测试信号eqtp。这里,空白信号h可以用于指示时间区间的分割。
91.eq测试信号eqtp可以包括伪随机二进制序列(prbs)模式。这里,prbs模式可以实现为prbs7模式、prbs9模式、prbs10模式等。
92.eq测试信号eqtp可以包括以dc平衡码方法编码的测试数据。这里,以dc平衡码方法编码的测试数据可以包括多个码组,各个码组具有相同的数字“0”和“1”。
93.在高速通信电路320中,均衡器410的配置可以根据在接收eq训练信号的多个时间区间中的各个时间区间中的eq设置值而改变。在高速通信电路320中,均衡器410的配置可以通过通信控制电路340的控制在各个时间区间中改变。各个eq设置值可以包括均衡器410的增益水平,并且还包括均衡器的抽头系数。通信控制电路340可以存储多个eq设置值。
94.根据实施例,高速通信电路320可以在预时钟训练区间和eq训练区间中重复进行时钟训练,并且因此,可以通过交替高电平(高电压电平)和低电平(低电压电平)来输出指示高速通信状态的高速通信状态信号cdr_l。
95.在经过eq训练区间之后,高速通信电路320可以进行时钟训练和链路训练,时钟训练和链路训练是用于高速通信的一般训练。在完成一般时钟训练之后,高速通信电路320可以输出高电平的高速通信状态信号cdr_l。
96.随后,高速通信电路320可以从数据处理装置140接收图像数据信号。这里,可以通过第一通信线ln1发送或接收图像数据信号。
97.在当高速通信电路320接收图像数据信号时由于静电放电(esd)而发生任何时钟
丢失的情况下,高速通信电路320可以输出低电平的高速通信状态信号cdr_l。
98.另一方面,高速通信电路320可以在接收图像数据信号的同时从数据处理装置140接收状态应答命令信号。
99.这里,如图7或图8所示,高速通信电路320可以按帧接收图像数据信号,并在一帧(例如,图7或图8中的第n
‑
1帧,n是自然数)和另一帧(例如,图7或图8中的第n帧)之间的帧控制区间crt中接收状态应答命令信号。
100.换句话说,状态应答命令信号可以被包括在高速通信电路320在帧控制区间ctr中接收到的帧控制信号中。
101.高速通信电路320可以在上述帧控制区间ctr之后的另一帧控制区间ctr中接收应答结束命令信号。
102.高速通信电路320可以将状态应答命令信号处理成状态应答命令信息以将其发送到通信控制电路340,并且将应答结束命令信号处理成应答结束命令信息以将其发送到通信控制电路340。
103.根据一个实施例,高速通信电路320可以在帧控制区间ctr中接收电平固定命令信号而不是状态应答命令信号。
104.当在帧控制区间ctr中接收到了电平固定命令信号时,高速通信电路320可以在上述帧控制区间ctr之后的另一帧控制区间ctr中接收固定解除命令信号。这里,电平固定命令信号以及固定解除命令信号可以被包括在帧控制信号中。
105.高速通信电路320可以将电平固定命令信号和固定解除命令信号分别处理成电平固定命令信息和固定解除命令信息,以将它们发送到锁定控制电路330。
106.根据实施例,当低速通信电路310被启动时,可以通过通信控制电路340的控制来停用高速通信电路320。相反,当低速通信电路310被停用时,可以通过通信控制电路340的控制来启动高速通信电路320。
107.锁定控制电路330可以接收来自低速通信电路310的低速通信状态信号cmd_l和来自高速通信电路320的高速通信状态信号cdr_l。
108.当低速通信电路310完成用于低速通信的时钟训练时,锁定控制电路330可以从低速通信电路310接收高电平的低速通信状态信号cmd_l,并从高速通信电路320接收低电平的高速通信状态信号cdr_l。
109.在这种情况下,锁定控制电路330可以输出如图5或图6所示的第一电平的锁定信号。这里,第一电平可以为高。
110.当低速通信电路310和数据处理装置之间的低速通信完成时,锁定控制电路330可以从低速通信电路310接收低电平的低速通信状态信号cmd_l。
111.另一方面,在高速通信区间包括预时钟训练区间和eq训练区间的情况下,锁定控制电路330可以从高速通信电路320接收高电平和低电平交替的高速通信状态信号cdr_l,并且从低速通信电路310接收低电平的低速通信状态信号cmd_l。
112.在这种情况下,如图5或图6所示,锁定控制电路330可以一致地输出第一电平的锁定信号。原因在于,如果根据高速通信状态信号cdr_l的电平改变来频繁地改变锁定信号的电平,则增加了锁定信号的发送中的错误概率。
113.当高速通信电路320完成一般时钟训练时,锁定控制电路330可以从高速通信电路
320接收高电平的高速通信状态信号cdr_l,并从低速通信电路310接收低电平的低速通信状态信号cmd_l。
114.在这种情况下,如图5或图6所示,锁定控制电路330可以一致地输出第一电平的锁定信号。
115.即使在高速通信电路320在接收图像数据信号时接收到状态应答命令信号的情况下,锁定控制电路330也可以一致地输出第一电平的锁定信号。
116.锁定控制电路330可以从高速通信电路320接收电平固定命令信息。在这种情况下,锁定控制电路330可以输出具有固定到第一电平的电平的锁定信号。
117.另一方面,在高速通信电路320接收到了电平固定命令信号之后由于静电放电(esd)而发生任何时钟丢失的情况下,高速通信电路320的信号处理可能异常地进行。
118.在这种情况下,高速通信电路320可能不能完整地接收固定解除命令信号或不能将固定解除命令信号处理成固定解除命令信息。
119.此时,锁定控制电路330可以从高速通信电路320接收低电平的高速通信状态信号cdr_l。然后,锁定控制电路330可以根据高速通信状态信号cdr_l的电平改变来将锁定信号从固定的第一电平改变为第二电平,并将其输出。
120.换句话说,在锁定控制电路330通过电平固定命令信息将锁定信号的电平固定为第一电平的状态下,在锁定控制电路330仅接收到低电平的高速通信状态信号cdr_l而未接收到固定解除命令信息的情况下,锁定控制电路330可以忽略电平固定命令信息并将锁定信号的电平改变为第二电平以将其输出。这里,如果第一电平为高,则第二电平可以为低。
121.根据实施例,在低速通信电路310和高速通信电路320中的一个被启动而另一个被停用的情况下,锁定控制电路330可以仅接收被启动的电路的状态信号cmd_l或cdr_l,并仅使用被启动的电路的状态信号来输出锁定信号。
122.例如,在低速通信电路310被启动而高速通信电路320被停用的情况下,锁定控制电路330可以仅从低速通信电路310接收低速通信状态信号cmd_l,并输出与低速通信状态信号cmd_l的电平相同的电平的锁定信号。
123.通信控制电路340可以控制低速通信电路310和高速通信电路320。
124.具体地,通信控制电路340可以根据从低速通信电路310发送的设置值数据来设置高速通信电路320中所包括的组件的设置值。
125.在高速通信电路320接收到包括图5中的时钟tr_clk的测试信号的情况下,通信控制电路340可以按每个预定时间改变时钟恢复电路420中所包括的振荡器的设置值。为此,通信控制电路340可以存储振荡器的多个设置值。
126.每当在每个预定时间处改变振荡器的设置值时,通信控制电路340可以在每个预定时间处通过低速通信电路310检查测试信号的时钟tr_clk的训练结果,并根据每个预定时间处的训练结果确定用于高速通信的频率(即图像数据信号的频率)的最优设置值。
127.换句话说,在从高速通信电路320接收图像数据信号之前,通信控制电路340可以根据图像数据信号的频率来优化高速通信电路320中所包括的时钟恢复电路420的设置值。这里,优化设置值可以是振荡器的设置值,并且优化设置值可以包括振荡器的参考电流值、参考电压值和增益调整值中的一个。
128.在高速通信电路320接收到如图6所示的eq训练信号的情况下,在高速通信电路
320接收eq训练信号的多个时间区间期间,通信控制电路340可以根据多个eq设置值在各个时间区间tp中改变均衡器410的配置。这里,多个eq设置值中的各个eq设置值可以包括均衡器410的增益水平,并且还可以包括均衡器410的抽头系数。多个eq设置值可以被包括在设置值数据中,并且通信控制电路340可以从先前存储的设置值数据中提取多个eq设置值,以在各个时间区间tp中改变均衡器410的配置。
129.另一方面,当高速通信电路320在接收图像数据信号的同时接收状态应答命令信号时,通信控制电路340可以从高速通信电路320接收状态应答命令信息。
130.以此方式,通信控制电路340可以生成与数据驱动装置120内部的操作状态有关的操作状态数据。这里,操作状态数据可以包括从低速通信电路310发送的设置值数据、在预时钟训练区间中优化的时钟恢复电路420的设置值、以及在eq训练区间中优化的均衡器410的设置值。操作状态数据还可以包括与图像数据信号有关的解码错误的数量、帧控制信号中所包括的帧控制数据等。
131.在数据处理装置140使用8b10b码对图像数据信号进行编码的情况下,解码错误的数量可以是使用8b10b码对图像数据信号进行解码时的错误的数量。
132.通信控制电路340可以在生成操作状态数据之后计算操作状态数据的校验和,并且将校验和包括在操作状态数据的头部(header)区域中。
133.换句话说,操作状态数据还可以包括校验和。
134.当生成操作状态数据时,通信控制电路340可以向编码器350和信号选择电路360输出高电平的操作控制信号。
135.另外,通信控制电路340可以将操作状态数据发送到编码器350。
136.这里,通信控制电路340可以仅生成操作状态数据一次。
137.通信控制电路340还可以在预定时间期间重复生成操作状态数据。
138.例如,在高速通信电路320在如图8所示的一帧(第n
‑
1帧)和另一帧(第n帧)之间的帧控制区间中接收到状态应答命令信号的情况下,通信控制电路340可以从紧接在接收到状态应答命令信号之后起直到被布置在第n帧之后的另一帧控制区间为止,生成n(n是自然数)个操作状态数据。通信控制电路340可以在被布置在第n帧之后的帧控制区间中从高速通信电路320接收应答结束命令信息。通过应答结束命令信息,通信控制电路340可以结束操作状态数据的生成。
139.另外,通信控制电路340可以向编码器350和信号选择电路360输出低电平的操作控制信号。
140.在编码器350从通信控制电路340接收到高电平的操作控制信号的情况下,可以启动编码器350。
141.随后,编码器350可以将从通信控制电路340发送的操作状态数据编码成操作状态信号。这里,编码器350可以使用manchester码将操作状态数据编码成操作状态信号。当使用manchester码对操作状态数据进行编码时,如图9所示,操作状态信号可能在每个位(bit)中具有脉冲改变,并且这可以实现容易地识别作为接收侧的数据处理装置140中的同步定时。例如,如果如图9a所示重复与二进制数字“0”相对应的数据位,或者即使如图9b所示重复与二进制数字“1”相对应的数据位,电压电平也可能在每个数据位的中间位置改变。
142.因此,即使当数据驱动装置120的发送频率改变时,数据处理装置140也可以容易
地识别使用manchester码编码的操作状态信号中的同步定时。
143.这样的操作状态信号可以包括前导(在该前导中与二进制数字中的任何一个相对应的manchester码被重复m次(m是等于或大于2的自然数))、布置在前导之后的开始位、布置在开始位之后的操作状态数据、以及布置在操作状态数据之后的结束位。
144.在通信控制电路340仅生成操作状态数据一次的情况下,由编码器350编码的操作状态信号可以如图7所示。在通信控制电路340在预定时间期间重复生成操作状态数据的情况下,由编码器350编码的操作状态信号可以如图8所示。在操作状态信号中,多个操作状态信号中的各个操作状态信号包括前导、开始位、操作状态数据和结束位,可以重复n次。
145.在编码器350在对操作状态数据进行编码之后从通信控制电路340接收到低电平的操作控制信号的情况下,可以停用编码器350。
146.当仅从锁定控制电路330接收到锁定信号时,信号选择电路360可以将锁定信号输出到逻辑门370。这里,锁定信号可以具有第一电平。
147.当接收到来自编码器350的操作状态信号和来自锁定控制电路330的锁定信号时,信号选择电路360可以通过通信控制电路340的控制将操作状态信号输出到逻辑门370。
148.换句话说,在信号选择电路360从通信控制电路340接收到低电平的操作控制信号的情况下,信号选择电路360可以针对锁定控制电路330选择信号输入和输出路径。
149.在信号选择电路360从通信控制电路340接收到高电平的操作控制信号的情况下,信号选择电路360可以针对编码器350选择信号输入和输出路径。
150.信号选择电路360可以是多路选择器,多路选择器用于选择多个输入信号中的一个以将其输出。
151.逻辑门(370)可以将第一电平的锁定信号发送到与其输出端子连接的第二通信线ln2,并且随后将操作状态信号发送到与其输出端子连接的第二通信线ln2。
152.换句话说,当逻辑门370通过其一个输入端子从信号选择电路360接收到第一电平的锁定信号、并且通过与其另一输入端子连接的第二通信线ln2从外部装置接收到第一电平的锁定信号时,逻辑门370可以对第一电平的锁定信号和来自外部装置的锁定信号进行逻辑运算,并将通过该逻辑运算获得的第一电平的锁定信号发送到与其输出端子连接的第二通信线ln2。
153.当逻辑门370通过其一个输入端子从信号选择电路360接收到操作状态信号、并且通过与其另一输入端子连接的第二通信线ln2从外部装置接收到第一电平的锁定信号时,逻辑门370可以对操作状态信号和来自外部装置的第一电平的锁定信号进行逻辑运算,并将通过该逻辑运算获得的信号发送到与其输出端子连接的第二通信线ln2。这里,第一电平可以为高,并且来自外部装置的第一电平的锁定信号可以是从另一相邻数据驱动装置的逻辑门发送来的。逻辑门370可以是用于进行与(and)运算的与门。
154.在第一电平为低的情况下,逻辑门370可以是用于进行或(or)运算的或门。
155.当逻辑门370通过其一个输入端子从信号选择电路360接收到操作状态信号并且通过与其另一输入端子连接的第二通信线ln2从外部装置接收到第二电平的锁定信号时,逻辑门370可以对操作状态信号和来自外部装置的第二电平的锁定信号进行逻辑运算,并将通过该逻辑运算获得的来自外部装置的第二电平的锁定信号发送到与其输出端子连接的第二通信线ln2。这里,第二电平可以为低。
156.至此,描述了数据驱动装置120的配置。
157.在下文中,将描述根据实施例的系统的配置。
158.参考图3,数据处理装置140和多个数据驱动装置120a、120b、120c、120d中的各个可以通过第一通信线ln1以点对点的方式连接。
159.数据处理装置140可以通过第一通信线ln1将图像数据信号分别发送到多个数据驱动装置120a、120b、120c、120d,并且可以在发送图像数据信号的同时顺序地检查多个数据驱动装置120a、120b、120c、120d的状态。
160.例如,为了使数据处理装置140在分别向多个数据驱动装置120a、120b、120c、120d发送图像数据信号的同时根据预定顺序检查数据驱动装置120c的操作状态,数据处理装置140可以在如图7或图8所示的第n
‑
1帧之后的帧控制区间ctr中向数据驱动装置120c发送状态应答命令信号。这里,数据处理装置140可以通过第1
‑
1通信线ln1
‑
1(第1
‑
1通信线ln1
‑
1是与数据驱动装置120c连接的第一通信线ln1)向数据驱动装置120c发送状态应答命令信号。
161.此时,数据处理装置140可以向其它数据驱动装置120a、120b、120d发送电平固定命令信号而不是状态应答命令信号。
162.接收到电平固定命令信号的其它数据驱动装置120a、120b、120d可以将要通过第二通信线ln2发送的锁定信号固定为第一电平。这里,第一电平可以为高。
163.已从数据处理装置140接收到状态应答命令信号的数据驱动装置120c可以生成包括指示其内部操作状态的操作状态数据的操作状态信号。这里,操作状态信号可以是使用manchester码编码的信号。
164.随后,数据驱动装置120c可以通过与另一数据驱动装置120d连接的第2
‑
1通信线ln2
‑
1发送操作状态信号而不是过去所发送的第一电平的锁定信号。这里,数据驱动装置120c还可以从另一数据驱动装置120b接收第一电平的锁定信号,对操作状态信号和第一电平的锁定信号进行逻辑运算,并通过第2
‑
1通信线ln2
‑
1发送通过该逻辑运算所获得的操作状态信号。根据实施例,逻辑运算可以是与运算或者或运算。
165.根据实施例,当数据驱动装置120c通过第2
‑
1通信线ln2
‑
1发送操作状态信号时,另一数据驱动装置120d可以通过从数据处理装置140接收到的电平固定命令信号将锁定信号固定为第一电平。
166.在这种状态下,数据驱动装置120d可以对通过第2
‑
1通信线ln2
‑
1从数据驱动装置120c接收到的操作状态信号和它自己的锁定信号进行逻辑运算。
167.以此方式,数据驱动装置120d可以通过第2
‑
2通信线ln2
‑
2发送数据驱动装置120c的操作状态信号。
168.数据处理装置140可以通过经由第2
‑
2通信线ln2
‑
2接收数据驱动装置120c的操作状态信号并将该操作状态信号处理成操作状态数据来检查操作状态,并存储数据驱动装置120c的操作状态数据。
169.这里,操作状态数据可以包括在预时钟训练区间中优化的时钟恢复电路420的设置值和在eq训练区间中优化的均衡器410的设置值。另外,操作状态数据还可以包括图像数据信号的解码错误的数量、帧控制信号中所包括的帧控制数据等。
170.根据实施例,在操作状态数据还包括校验和的情况下,数据处理装置140可以使用
校验和来确定操作状态数据中是否存在任何错误。
171.在数据处理装置140使用校验和确定操作状态数据的错误的情况下,数据处理装置140可以再次向数据驱动装置120c发送状态应答命令信号,并向数据驱动装置120a、120b、120d发送电平固定命令信号。
172.另一方面,在操作状态信号包括多个操作状态信号的情况下,各个操作状态信号包括前导、开始位、操作状态数据和结束位,重复n次,如图8所示。并且操作状态数据包括解码错误的数量,数据处理装置140可以实时地检查发送到数据驱动装置120c的图像数据信号的解码错误率,并且因此,可以进行用于降低图像数据信号的解码错误率的操作。例如,当编码图像数据信号时,数据处理装置140可以应用编码方式来降低解码错误率。
173.以此方式,数据处理装置140可以检查和存储多个数据驱动装置120a、120b、120c、120d中的各个的操作状态数据。
174.当正在驱动显示装置100时,在数据处理装置140已经存储了多个数据驱动装置120a、120b、120c、120d中的各个的操作状态数据之后,由于多个数据驱动装置120a、120b、120c、120d中的至少一个中的静电放电(esd)而发生任何时钟丢失时,由数据处理装置140接收到的锁定信号可以具有第二电平。在这种情况下,数据处理装置140和多个驱动装置120a、120b、120c、120d需要进行时钟恢复处理。这里,时钟恢复处理可以意指图5或图6中的从命令模式区间中的前导区间到显示模式区间中的链路训练区间的处理。
175.根据实施例,在时钟恢复处理期间,数据处理装置140可以将(相应数据驱动装置的操作状态数据中所包括的)时钟恢复电路420的最优设置值和均衡器410的最优值包括在设置值数据中,并在命令模式区间中将这样的设置值数据发送到相应数据驱动装置。这样,在时钟恢复处理期间可以省略预时钟训练区间和eq训练区间。
176.另一方面,在分别接收到电平固定命令信号的剩余数据驱动装置120a、120b、120d中的至少一个数据驱动装置中由于esd等而发生任何时钟丢失的情况下,该至少一个数据驱动装置可能不能正常地从数据处理装置140接收信号,并且可能不能正常地处理这些信号,并且因此,可能不能正常地感知固定解除命令信号。
177.在这种情况下,即使在存在时钟丢失时,该至少一个驱动装置也可以将锁定信号保持为固定在第一电平,并且因此,数据处理装置140可能未识别到该至少一个数据驱动装置中存在异常。
178.根据实施例,为了防止这种情况,在分别接收到电平固定命令信号的剩余数据驱动装置120a、120b、120d中的至少一个数据驱动装置中存在任何时钟丢失的情况下,该至少一个数据驱动装置可以忽略电平固定命令信号并将锁定信号的电平改变为第二电平。
179.这里,数据处理装置140可以不从该一个数据驱动装置120c接收操作状态信号,而是可以从另一数据驱动装置120d接收第二电平的锁定信号。
180.在这种情况下,数据处理装置140可以通过第一通信线ln1向多个驱动装置120a、120b、120c、120d发送复位信号,各个复位信号在预定时间期间被维持在第一电平或第二电平。以此方式,数据处理装置140和多个数据驱动装置120a、120b、120c、120d可以进行时钟恢复处理。这里,数据处理装置140可以顺序地将复位信号分别发送到多个数据驱动装置120a、120b、120c、120d。
181.根据实施例,在数据处理装置140最初向一个数据驱动装置120c发送状态应答命
令信号并且在预定时间内未接收到该一个数据驱动装置120c的操作状态信号的情况下,数据处理装置140可以至少再一次向该一个数据驱动装置120c发送状态应答命令信号。
182.在数据处理装置140即使在至少再一次向数据驱动装置120c发送了状态应答命令信号之后也未从该数据驱动装置120c接收到操作状态信号的情况下,数据处理装置140可以将如上所述的复位信号发送到多个数据驱动装置120a、120b、120c、120d,以在多个数据驱动装置120a、120b、120c、120d中进行时钟恢复处理。
183.如上所述,由于当驱动显示装置100时,数据处理装置140可以检查各个数据驱动装置120a、120b、120c、120d的操作状态,所以数据处理装置140可以有效率地管理多个数据驱动装置120a、120b、120c、120d。
184.在下文中,将描述多个数据驱动装置120a、120b、120c、120d中的一个数据驱动装置120c的数据发送和接收处理,数据驱动装置120c从数据处理装置140接收状态应答命令信号。
185.图10是示出根据实施例的数据驱动装置发送和接收数据的处理的流程图。
186.该一个数据驱动装置120c可以通过与数据处理装置140连接的第1
‑
1通信线(第1
‑
1通信线是第一通信线)接收图像数据信号(s1010)。这里,图像数据信号可以按帧分割。
187.当接收到图像数据信号时,该一个数据驱动装置120c可以通过第2
‑
1通信线发送预定电平(即第一电平)的锁定信号(s1020)。这里,第一电平可以为高。
188.该一个数据驱动装置120c可以在按帧接收图像数据信号的同时从数据处理装置140接收状态应答命令信号(s1030)。该一个数据驱动装置120c可以在帧控制区间中接收状态应答命令信号,该帧控制区间被布置在图像数据信号的一帧和另一帧之间。
189.已经接收到状态应答命令信号的该一个数据驱动装置120c可以生成包括与其内部操作有关的操作状态数据的操作状态信号,并且通过第2
‑
1通信线发送该操作状态信号而不是预定电平的锁定信号(s1040)。这里,操作状态信号可以是使用manchester码编码的信号。
190.在s1040之后,该一个数据驱动装置120c可以通过第2
‑
1通信线再次发送预定电平的锁定信号(s1050)。
191.根据实施例,在s1010之前,该一个数据驱动装置120c可以根据图像数据信号的频率来优化时钟恢复电路的设置值,该时钟恢复电路被包括在接收图像数据信号的高速通信电路中。这里,时钟恢复电路的优化设置值可以包括时钟恢复电路中所包括的振荡器的参考电流值、参考电压值和增益调整值中的一个,并且操作状态数据可以包括时钟恢复电路的优化设置值。
192.在s1010之前,该一个数据驱动装置120c可以根据第1
‑
1通信线的特性来优化高速通信电路中所包括的均衡器410的设置值。这里,均衡器的优化设置值可以包括均衡器的增益水平,并且操作状态数据可以包括均衡器的优化设置值。
193.在s1040中,该一个数据驱动装置120c可以在预定时间期间重复生成和发送操作状态信号。
194.在s1050中,该一个数据驱动装置120c可以在上述帧控制区间之后的另一帧控制区间中接收应答结束命令信号。该一个数据驱动装置可以通过应答结束命令信号来停止生成和发送操作状态信号,并再次发送预定电平的锁定信号。
195.在s1040中,该一个数据驱动装置120c可以对从外部装置(例如,另一数据驱动装置120b)接收到的预定电平的锁定信号和操作状态信号进行与运算,并且通过第2
‑
2通信线发送通过与运算获得的操作状态信号。
196.相关申请的交叉引用
197.本技术要求于2020年6月15日提交的韩国专利申请10
‑
2020
‑
0072284的优先权,在此通过引用将其全文并入。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。