1.本发明涉及道路交通领域,特别是涉及一种车辆实时定位核查系统及核查方法。
背景技术:
2.交通运输部在近几年关于数字交通发展规划以及推动新一代国家交通控制网和智慧公路试点中,多次提到要加大基于大数据的路网综合管理能力,推动北斗高精度定位综合应用,推动“互联网”路网综合服务。并定制发展目标,到2025年,交通运输基础设施和运载装备全要素、全周期的数字化升级迈出新步伐,数字化采集体系和网络化传输体系基本形成。交通运输成为北斗导航的民用主行业,第五代移动通信(5g)等公网和新一代卫星通信系统初步实现行业应用。交通运输大数据应用水平大幅提升,出行信息服务全程覆盖,物流服务平台化和一体化进入新阶段,行业治理和公共服务能力显著提升。交通与汽车、电子、软件、通信、互联网服务等产业深度融合,新业态和新技术应用水平保持世界先进。到2035年,交通基础设施完成全要素、全周期数字化,天地一体的交通控制网基本形成,按需获取的即时出行服务广泛应用。同时,目前针对目前交通相关的税费制度采用统一定价的模式,如保险费用关联车辆出险金额和车辆金额和年限报价,相关税收也是根据车辆加油费中包含,这样会导致一定的不均衡;近些年在讨论基于行驶里程收里程险,里程税,具体汽车保险根据行驶高危路段和驾驶习惯、行程里程数,综合计算出差异化收费规则。
3.根据现有技术,可以通过设备信息盒探测汽车定位信息,并通过陀螺仪计算车辆的里程以及行车习惯。在车辆行驶的过程中,将获取的车辆定位和陀螺仪数据,通过移动互联网传输至系统平台进行信息管理和运算。另一方面,为了尽可能减少采集的车辆信息,当车辆处于停车状态时会选择减少上传频次,并控制设备处于低功耗状态,但是这样一来,会导致设备在无供电状态时,无法上传设备信息。同时由于设备信息盒安装在车内,在异常或者断电的情况很难发现,也会导致无法上传设备信息的情况出现,违背了实时定位车辆以及里程信息和驾驶习惯的信息收集的初衷。另一方面也增加了施救人员对车载设备发生故障,尤其是车载定位设备发生故障时的施救难度。因此急需一种能够主动发现车载设备信息是否正常运行的主动发现应用系统。
技术实现要素:
4.本发明的目的是解决现有技术的不足,提供一种车辆实时定位核查系统及核查方法。
5.为了解决上述问题,本发明采用如下方案:
6.一种车辆实时定位核查系统,包括前端采集子系统、车载采集子系统以及云平台系统;其中前端采集子系统设置于车辆通行的道路上,前端采集子系统与云平台系统通信连接;车载采集子系统设置于车辆上,车载采集子系统也与云平台系统通信连接;
7.所述前端采集子系统包括配置数据存储单元、离线数据存储单元、车牌跟踪牌识单元、车辆特征识别单元、实时定位采集单元、前端智能运算单元、数据发送单元以及图像
采集单元;其中前端智能运算单元分别与配置数据存储单元、离线数据存储单元、车牌跟踪识别单元、车辆特征识别单元、实时定位采集单元以及数据发送单元连接;图像采集单元分别与车牌跟踪牌识单元以及车辆特征识别单元连接;数据发送单元还分别与离线数据存储单元以及配置数据存储单元连接;数据发送单元还与云平台系统连接;
8.所述车载采集子系统包括配置数据存储单元二、离线数据存储单元二、车载通信对接单元、实时定位采集单元二、行驶特征采集单元、车载智能运算单元以及数据发送单元二;其中车载智能运算单元分别与配置数据存储单元二、离线数据存储单元二、车载通信对接单元、行驶特征采集单元、实时定位采集单元二以及数据发送单元二连接;数据发送单元二还分别与配置数据存储单元二、离线数据存储单元二连接;数据发送单元二还与云平台系统连接。
9.进一步的,所述图像采集单元包括摄像头,图像采集装置用于采集车辆通行的图片或图像数据;车辆跟踪牌识别单元以及车辆特征识别单元用于识别车牌和车辆信息;实时定位采集单元用于采集前端采集子系统的实时地理位置。
10.进一步的,所述数据发送单元与云平台系统之间设置有至少一种网络传输方式;网络传输方式包括专网通信、无线互联网、有线通信网、物联网;所述配置数据存储单元存储有云平台系统传输的配置指令、配置参数、运算计算方案以及标准定位信息。
11.进一步的,所述离线数据存储单元存储有前端采集子系统的离线数据,包括离线时的前端智能运算单元的运算结果以及车牌跟踪识别单元、车辆特征识别单元、实时定位采集单元和图像采集单元采集的数据;离线数据存储单元存储的数据都设置有时间戳。
12.进一步的,所述行驶特征采集单元包括转速传感器和加速度传感器;实时定位采集单元二用于采集车辆的实时地理位置;车载通信对接单元与车辆的通信总线连接,车载通信对接单元用于获取车辆的动作信号数据;实时定位采集单元二用于采集车辆的实时地理位置;数据发送单元二与云平台系统之间采用至少一种网络传输连接方式;网络传输连接方式包括专网通信、无线互联网、有线通信网、物联网;配置数据存储单元二存储有云平台系统传输的配置指令、配置参数以及运算计算方案;离线数据存储单元二存储有车载采集子系统的离线数据,离线数据存储单元二存储的离线数据都设置有时间戳;车载采集子系统还包括车载告警接口单元,车载告警单元包括告警装置、通讯设备以及告警按钮。
13.一种车辆实时定位核查方法,包括如下步骤:
14.步骤1:云平台系统分别获取前端采集子系统以及车载采集子系统采集的数据;
15.步骤2:根据设定信息,校验前端采集子系统采集的数据的准确性;其中若前端采集子系统采集的数据满足准确性要求,则将数据保留,否则将数据排除;
16.步骤3:判断车载采集子系统对应的车辆数据;
17.步骤4:云平台系统根据车载采集子系统对应的车辆信息,筛选出前端采集子系统中采集到的对应车辆的信息,包括前端采集子系统的位置信息p2和时间信息t1;
18.步骤5:云平台系统根据筛选出的前端采集子系统采集的信息,与车载采集子系统采集的车辆数据进行比对,判断车载采集子系统是否正常工作,并统计异常工作状态的信息;
19.步骤6:云平台系统根据车载采集子系统的异常工作状态信息,对车载采集子系统以及前端采集子系统发送报警信息。
20.进一步的,所述步骤2中的设定信息为设定的前端采集子系统的位置数据;前端采集子系统采集的数据包括车辆车牌信息、车辆特征信息、前端采集子系统编号、前端采集子系统实时定位p2、前端采集子系统定位偏差距离d1、前端采集子系统定位精准度信息、前端采集子系统车辆抓拍时间t1;
21.校验前端采集子系统采集的数据的准确性包括如下步骤:
22.步骤21:前端采集子系统的实时定位采集单元获取位置信息p2;
23.步骤22:前端采集子系统接收云平台系统发送的设定位置信息p1,将其与位置信息p2进行比对,获得定位偏差距离d1;
24.步骤23:判断定位偏差距离与设定值d0的关系;其中若d1>d0,则认为前端采集子系统的实时定位偏差较大,定位准确度低,排除该数据;若d1<=d0,则认为前端采集子系统的定位准确度高,保存数据。
25.进一步的,所述步骤5中,判断车载采集子系统是否正常工作,包括如下步骤:
26.步骤51:云平台系统根据前端采集子系统的车辆抓拍时间t1,截取车载采集子系统采集的车辆数据的时间范围;
27.步骤52:判断车载采集子系统在该时间范围内是否存在采集数据;若存在采集数据,则获取车载采集子系统在时间范围内的数据,进入下一步骤;否则认为车载采集子系统发生异常,并累加一次异常,结束步骤;
28.步骤53:根据车载采集子系统在时间范围内的数据,获取最接近抓拍时间t1的前后时间节点的数据;
29.步骤54:根据抓拍时间t1的前后时间节点的车载采集子系统的车辆数据,获得与抓拍时间t1对应的车载采集子系统的位置信息p3;
30.步骤55:根据位置信息p3和位置信息p1,获得车载采集子系统的偏差距离d2;判断偏差距离d2是否满足设定条件;若d2满足设定条件,则认为车载采集子系统正常工作,清除所有异常记录,并记录一次清除操作;否则认为车载采集子系统发生异常,并累加一次异常。
31.进一步的,所述步骤6中,若累加的车载采集子系统的异常次数超过预设的容忍次数,则由云平台系统向对应的车载采集子系统发送报警信息,并且云平台系统还会向最近时刻抓拍到该车辆的前端采集子系统,以及距离该前端采集子系统设定距离内的所有前端采集子系统发送报警信息。
32.本发明的有益效果为:
33.通过在云平台系统比对相关联的时间节点的前端采集子系统抓拍车辆信息以及车载采集子系统上传的车辆信息,判断车载采集子系统是否工作异常,从而保障车载采集子系统能够实时、有效的工作,保障云平台系统的核算数据更加精准,推动车辆运行数据的全面掌控;
34.通过在步骤5中设置异常累加算法,并在步骤6中设置异常的容忍次数,结合车载采集子系统正常工作时清除所有异常数据的操作,有效避免误判的发生;
35.通过在步骤54中将前时间节点和后时间节点与抓拍时间节点t1进行比对,并根据比对结果获得车载采集子系统的车辆位置p3,保证位置p3的定位准确,缩小车载采集子系统和前端采集子系统之间因为采集时间偏差导致的位置偏差;
36.通过设置前端采集子系统包括车牌跟踪牌识单元、车辆特征识别单元、实时定位采集单元,采集通行车辆的相关信息,降低对车载采集子系统的依赖;
37.通过在前端采集子系统中设置离线数据存储单元以及在车载采集子系统中设置离线数据存储单元二,使得网络连接不稳定或者终中断时采集的数据信息也能够上传云平台系统,并对该部分数据设置时间戳,便于进行区分。
附图说明
38.图1为本发明实施例一的整体结构图;
39.图2为本发明实施例一的前端采集子系统的结构框图;
40.图3为本发明实施例一的车载采集子系统的结构框图。
具体实施方式
41.以下通过特定的具体实例说明本发明的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本发明的其他优点与功效。本发明还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本发明的精神下进行各种修饰或改变。需说明的是,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。
42.需要说明的是,以下实施例中所提供的图示仅以示意方式说明本发明的基本构想,遂图式中仅显示与本发明中有关的组件而非按照实际实施时的组件数目、形状及尺寸绘制,其实际实施时各组件的型态、数量及比例可为一种随意的改变,且其组件布局型态也可能更为复杂。
43.实施例一:
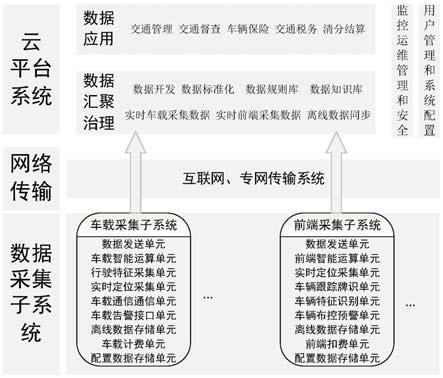
44.如图1所示,一种基于车牌识别技术的车辆实时定位核查系统,包括前端采集子系统、车载采集子系统以及云平台系统;其中前端采集子系统设置于车辆通行的道路上,在本例中前端采集子系统设置于道路卡口以及通道出入口等位置;前端采集子系统与云平台系统通信连接;车载采集子系统设置于车辆上,车载采集子系统也与云平台系统通信连接。其中前端采集子系统用于采集通行车辆的信息,包括车牌、车辆属性等;车载采集子系统用于采集车辆的行驶数据,包括车辆的实时定位信息、车辆速度和加速度等,车载采集子系统还用于识别车辆的异常特质,异常特质包括车辆紧急刹车、紧急停车、超高速行驶等;云平台系统用于汇总前端采集子系统以及车载采集子系统采集的数据,并处理数据,获取车辆位置等信息。
45.如图2所示,所述前端采集子系统包括配置数据存储单元、离线数据存储单元、车牌跟踪牌识单元、车辆特征识别单元、实时定位采集单元、前端智能运算单元、数据发送单元以及图像采集单元。其中前端智能运算单元分别与配置数据存储单元、离线数据存储单元、车牌跟踪识别单元、车辆特征识别单元、实时定位采集单元以及数据发送单元连接;图像采集单元分别与车牌跟踪牌识单元以及车辆特征识别单元连接;数据发送单元还分别与离线数据存储单元以及配置数据存储单元连接;数据发送单元还与云平台系统连接。需要说明是在一些其他实施方式中车牌跟踪牌识单元、车辆特征识别单元以及实时定位采集单元可以与前端智能运算单元一体设置。
46.图像采集单元包括摄像头,图像采集装置用于采集车辆通行的图片或图像数据。
47.车辆跟踪牌识别单元用于跟踪车辆在画面内的行驶路径,并进行车辆车牌识别,获取车牌信息,包括车牌号、车牌颜色以及车牌属性等。车辆特征识别单元用于识别车辆特征,包括车辆颜色、车辆型号以及车辆品牌等,其中识别车辆的特征,是为了便于和车牌记录的车辆信息进行比对。需要说明的是车辆跟踪牌识别单元以及车辆特征识别单元均采用现有的设备。
48.实时定位采集单元用于采集前端采集子系统的实时地理位置,便于对获取的车辆位置信息进行校正。
49.数据发送单元用于实现前端采集子系统与云平台系统之间的通信,数据发送单元与云平台系统之间采用网络传输连接方式,包括专网通信、无线互联网、有线通信网、物联网等传输方式,需要说明的是网络传输连接方式可以同时采用一种或多种网络传输方式,在本例中采用多用网络传输方式,其目的是为了保证系统之间连接的稳定性。
50.配置数据存储单元用于接收并存储云平台系统传输的配置指令、配置参数、运算计算方案以及标准定位信息;其中配置指令、配置参数以及运算计算方案为前端智能运算单元的设定运算规则,标准定位信息为前端采集子系统的设定位置信息。
51.前端智能运算单元用于将接收的数据根据设定的运算规则进行运算,并将运算结果传输至数据发送单元或离线数据存储单元。
52.离线数据存储单元用于存储前端采集子系统的离线数据,包括离线时的前端智能运算单元的运算结果以及车牌跟踪识别单元、车辆特征识别单元、实时定位采集单元和图像采集单元采集的数据,需要说明的是离线数据存储单元存储的数据都带有时间戳,附带时间戳便于对存储的数据进行区分。
53.前端采集子系统还包括前端扣费单元,其中前端扣费单元与前端智能运算单元连接。前端扣费单元用于实现车辆的通行计费,设置前端扣费单元是为了拓展前端采集子系统的适应环境。前端扣费单元可兼容现有的etc计费以及电子标签计费等方式,前端扣费单元通过设置软件或设置硬件或两者结合,实现扣费系统绑定。
54.前端采集子系统还包括车辆布控预警单元,其中车辆布控预警单元与前端智能运算单元连接。车辆布控预警单元用于比对前端智能运算单元的运算结果和其预先存储的车辆信息,实现对设定特征的车辆进行识别,其中设定特征包括车牌号、车辆颜色、车辆型号等。车辆布控预警单元还用于进行报警联动,报警联动包括声光预警、后台预警以及通行闸口关闭等,在本例中后台预警包括云平台系统预警以及终端预警,其中终端预警为车载采集子系统。
55.如图3所示,所述车载采集子系统包括配置数据存储单元二、离线数据存储单元二、车载通信对接单元、实时定位采集单元二、行驶特征采集单元、车载智能运算单元以及数据发送单元二;其中车载智能运算单元分别与配置数据存储单元二、离线数据存储单元二、车载通信对接单元、行驶特征采集单元、实时定位采集单元二以及数据发送单元二连接;数据发送单元二还分别与配置数据存储单元二、离线数据存储单元二连接;数据发送单元二还与云平台系统连接。
56.行驶特征采集单元包括传感器,在本例中包括转速传感器和加速度传感器等。行驶特征采集单元用于获取车辆行驶过程的特征参数,包括运动加速度、转向加速度以及车
速等,其中车辆行驶过程的特征参数用于分析车辆的行驶特征、习惯以及危险驾驶运动参数等,危险驾驶运动参数表示车辆行驶过程中的异常参数,包括车辆的异常车速等。车载通信对接单元用于连接车辆的通信总线,获取车辆的动作信号数据,将判断异常的动作信号进行告警上报,在本例中车载通信对接单元将判断为异常的动作信号传输至车载智能运算单元。需要说明的是行驶特征采集单元以及车载通信对接单元均为现有的装置。
57.实时定位采集单元二用于采集车辆的实时地理位置,在本例中实时定位采集单元支持至少一种地理位置信息采集方式,地理位置信息采集方式包括gps、北斗定位系统、伽利略卫星定位系统以及glonass定位系统等。通过实时定位采集单元二获取车辆的实时地理位置信息、海拔高度以及位置精度。
58.数据发送单元二用于实现车载采集子系统与云平台系统的通信;数据发送单元二与云平台系统之间采用网络传输连接方式,包括专网通信、无线互联网、有线通信网、物联网等传输方式,需要说明的是网络传输连接方式可以同时采用一种或多种网络传输方式,在本例中采用多用网络传输方式,其目的是为了保证系统之间连接的稳定性。数据发送单元二设置有数据上传频率,数据上传频率存储于配置数据存储单元二中。
59.配置数据存储单元二用于接收并存储云平台系统传输的配置指令、配置参数以及运算计算方案;其中配置数据存储单元二中的配置指令、配置参数以及运算计算方案为车载智能运算单元的运算规则,配置数据存储单元二中的配置参数中还包括数据发送单元的数据上传频率。
60.车载智能运算单元用于将接收的数据根据设定的运算规则进行分布式运算,将运算的结果传输至数据发送单元二实现上传,或者将运算的结果传输至离线数据存储单元二进行存储。
61.离线数据存储单元二用于存储车载采集子系统的离线数据,其中离线数据包括数据发送单元二与云平台系统的连接不稳定或者断开连接时,由车载通信对接单元和行驶特征采集单元采集的数据,以及车载智能运算单元运算的结果。离线数据存储单元二存储的离线数据都带有时间戳。在数据发送单元二和云平台系统的连接恢复时,会第一时间将离线数据存储单元二中存储的数据上传至云平台系统。
62.车载采集子系统还包括车载计费单元,其中车载计费单元与前端采集子系统的前端扣费单元相对应,车载计费单元与车载智能运算单元连接。车载计费单元可兼容现有的etc计费以及电子标签计费等方式,车载计费单元通过设置软件或设置硬件或两者结合,实现扣费系统绑定。
63.车载采集子系统还包括车载告警接口单元,车辆告警接口单元用于告警驾驶人员或者根据驾驶人员操作对外部告警。车载告警单元包括告警装置、通讯设备以及告警按钮;其中告警装置用于告警驾驶人员;通讯设备用于驾驶人员与外部的语音沟通,包括驾驶人员向外部求助、报警以及外部向车辆播放紧急通知等;告警按钮用于一键报警等操作;需要说明的是,在本例中外部表示云平台系统。
64.所述云平台系统采用分布式部署,云平台系统用于接收和处理前端采集子系统以及车载采集子系统上传的数据信息。
65.在实施的过程中,通过设置云平台系统、前端采集子系统以及车载采集子系统,由云平台系统对前端采集子系统以及车载采集子系统的数据进行整合分析,其中一些数据还
能够进行相互印证,包括地理位置数据、车辆速度等,校验车载采集子系统是否运行正常;通过设置前端采集子系统包括车牌跟踪牌识单元、车辆特征识别单元、实时定位采集单元,采集通行车辆的相关信息,降低对车载采集子系统的依赖;通过在前端采集子系统中设置离线数据存储单元以及在车载采集子系统中设置离线数据存储单元二,使得网络连接不稳定或者终中断时采集的数据信息也能够上传云平台系统,并对该部分数据设置时间戳,便于进行区分。
66.一种车辆实时定位核查方法,包括如下步骤:
67.步骤1:云平台系统分别获取前端采集子系统以及车载采集子系统采集的数据;
68.步骤2:根据设定信息,校验前端采集子系统采集的数据的准确性;其中若前端采集子系统采集的数据满足准确性要求,则将数据保留,否则将数据排除;
69.步骤3:判断车载采集子系统对应的车辆数据,包括车牌号、车辆颜色、车辆型号等;
70.步骤4:云平台系统根据车载采集子系统对应的车辆信息,筛选出前端采集子系统中采集到的对应车辆的信息,包括前端采集子系统的位置信息p2和时间信息t1;
71.步骤5:云平台系统根据筛选出的前端采集子系统采集的信息,与车载采集子系统采集的车辆数据进行比对,判断车载采集子系统是否正常工作,并统计异常工作状态的信息;
72.步骤6:云平台系统根据车载采集子系统的异常工作状态信息,对车载采集子系统以及前端采集子系统发送报警信息。
73.所述步骤2中的设定信息在本例中为设定位置信息,即为前端采集子系统的位置数据;其中校验前端采集子系统采集的信息的准确性的过程可以在云平台系统中进行或者在前段采集子系统中进行,在本例中校验的过程在前端采集子系统完成。前端采集子系统采集的数据包括车辆车牌信息、车辆特征信息、前端采集子系统编号、前端采集子系统实时定位p2、前端采集子系统定位偏差距离d1、前端采集子系统定位精准度信息、前端采集子系统车辆抓拍时间t1等。
74.校验前端采集子系统采集的数据的准确性包括如下步骤:
75.步骤21:前端采集子系统的实时定位采集单元获取位置信息p2;
76.步骤22:前端采集子系统接收云平台系统发送的设定位置信息p1,将其与位置信息p2进行比对,获得定位偏差距离d1;
77.步骤23:判断定位偏差距离与设定值d0的关系;其中若d1>d0,则认为前端采集子系统的实时定位偏差较大,定位准确度低,排除该数据;若d1<=d0,则认为前端采集子系统的定位准确度高,保存数据。
78.所述步骤3中,因为一个车辆中有且仅有一个车载采集子系统,因此每个车载采集子系统都和唯一的车辆相对应。
79.所述步骤4中,如果在前端采集子系统中获得的车辆信息中的车牌号、车辆颜色、车辆型号没有与车载采集子系统对应的车辆信息相一致,或者在前段采集子系统中没有找到对应的车辆抓拍的信息,则认为车辆存在改装或套牌嫌疑,对该车载采集子系统发出报警信息,并根据车载采集子系统的定位信息,通知与之设定距离范围内的前端采集子系统,实现跨时空判断套牌车辆,完善车辆布控管理。
80.所述步骤5中,车载采集子系统采集的车辆数据包括车辆的实时位置信息p3。其中判断车载采集子系统是否正常工作,包括如下步骤:
81.步骤51:云平台系统根据前端采集子系统的车辆抓拍时间t1,截取车载采集子系统采集的车辆数据的时间范围;
82.步骤52:判断车载采集子系统在该时间范围内是否存在采集数据;若存在采集数据,则获取车载采集子系统在时间范围内的数据,进入下一步骤;否则认为车载采集子系统发生异常,并累加一次异常,结束步骤;
83.步骤53:根据车载采集子系统在时间范围内的数据,获取最接近抓拍时间t1的前后时间节点的数据;在本例中为前后时间节点对应的车辆实时位置信息p3;
84.步骤54:根据抓拍时间t1的前后时间节点的车载采集子系统的车辆数据,获得与抓拍时间t1对应的车载采集子系统的位置信息p3;
85.步骤55:根据位置信息p3和位置信息p1,获得车载采集子系统的偏差距离d2;判断偏差距离d2是否满足设定条件;若d2满足设定条件,则认为车载采集子系统正常工作,清除所有异常记录,并记录一次清除操作;否则认为车载采集子系统发生异常,并累加一次异常。
86.所述步骤54中,获得车载采集子系统的位置信息p3,需要依据车载采集子系统的车辆数据在抓拍时间t1的前时间节点t1
前
、后时间节点t1
后
与t1的关系;在本例中若前时间节点t1
前
、后时间节点t1
后
均满足与时间节点t1的差值小于等于设定时间t,则取前时间节点t1
前
、后时间节点t1
后
中最靠近t1的时间节点,并获取该时间节点对应的车载采集子系统的位置信息p3;若前时间节点t1
前
、后时间节点t1
后
中的一者满足与时间节点t1的差值小于等于设定时间t,则取满足条件的时间节点对应的车载采集子系统的位置信息p3;若前时间节点t1
前
、后时间节点t1
后
均不满足与时间节点t1的差值小于等于设定时间t,则取前时间节点t1
前
与后时间节点t1
后
对应的车载采集子系统的位置信息的均值作为p3。需要说明的是在一些其他实施方式中,也可将前时间节点t1
前
和后时间节点t1
后
对应的车载采集子系统的位置信息均作为p3,并在步骤55中将两个时间节点的位置信息p3分别与位置信息p1进行比对。
87.所述步骤55中,若偏差距离d2小于等于设定的d
‑
preset,则认为车载采集子系统的正常工作,此时清除该车辆的所有异常记录,并记录一次异常清除操作;若偏差距离d2大于设定的d
‑
preset,则说明车在采集子系统中的实时定位采集单元二的定位偏差大,可能存在异常,此时在云平台系统中该车载采集子系统的异常工作状态进行1次累加,并关联保存对应的车载采集子系统上传的车辆数据,在本例中为车载采集子系统在异常工作状态对应时间节点的车辆数据。
88.所述步骤6中,若累加的车载采集子系统的异常次数超过预设的容忍次数,则由云平台系统向对应的车载采集子系统发送报警信息,并且云平台系统还会向最近时刻抓拍到该车辆的前端采集子系统,以及距离该前端采集子系统设定距离内的所有前端采集子系统发送报警信息;保证在第一时间发现并且纠正异常工作的车载采集子系统,有效避免车辆发生意外情况。需要说明的是在一些其他实施方式中,在设定的时间周期内,被清除的异常数据超过预设的数量,也会对车载制系统和前端采集子系统发送报警信息。
89.需要说明的是云平台系统还会根据车载采集子系统中的车载通信对接单元以及行驶特征采集单元采集的车辆信息,判断车辆是否存在行驶异常,包括车辆行驶速度、加速
度等,若存在行驶异常,则对数据进行保存,并直接对车载采集子系统发送报警信息,还会联系外部的交通局等。
90.在实施的过程中,通过在云平台系统比对相关联的时间节点的前端采集子系统抓拍车辆信息以及车载采集子系统上传的车辆信息,判断车载采集子系统是否工作异常,从而保障车载采集子系统能够实时、有效的工作,保障云平台系统的核算数据更加精准,推动车辆运行数据的全面掌控;通过在步骤5中设置异常累加,并在步骤6中设置异常的容忍次数,有效避免误判的发生;通过在步骤54中将前时间节点和后时间节点与抓拍时间节点t1进行比对,并根据比对结果获得车载采集子系统的车辆位置p3,保证位置p3的定位准确,缩小车载采集子系统和前端采集子系统之间因为采集时间偏差导致的位置偏差。
91.一种车辆里程时空分析方法,包括如下步骤:
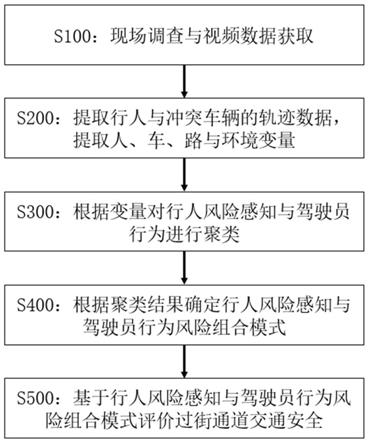
92.步骤s1:云平台系统接收前端采集子系统的数据以及车载采集子系统的车辆数据;
93.步骤s2:根据前端采集子系统采集的数据,将数据依据不同的车辆进行分类;
94.步骤s3:在步骤s2的分类数据中筛选出车辆a的数据;
95.步骤s4:根据前端采集子系统获得的车辆a的数据,得到车辆a的行驶路径;
96.步骤s5:将车辆a的行驶路径与其车载采集子系统采集的车辆数据进行比对,判断车载采集子系统采集的车辆数据中的位置信息是否符合行驶路径;若不符合,则记录车载采集子系统异常,进入下一步骤;若符合,则直接进入下一步骤;
97.步骤s6:获得行驶路径的里程数。
98.所述步骤s6中,车辆行驶的里程数,通过相邻的前端数据采集子系统获得;首先根据时间顺序统计车辆经过的前端数据采集子系统;其次对经过任意相邻的两个前端数据采集子系统之间的设定距离值进行求和,将求得的数值作为行驶路径的里程数。获得的车辆行驶路径的里程数可以用于计算过路费用等;在计算过路费用的过程中,还需要判断相邻的前端采集子系统之间的道路是否属于收费路段。
99.以上描述仅是本发明的一个具体实例,不构成对本发明的任何限制。显然对于本领域的专业人员来说,在了解了本发明内容和原理后,都可能在不背离本发明原理、结构的情况下,进行形式和细节上的各种修改和改变,但是这些基于本发明思想的修正和改变仍在本发明的权利要求保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。