1.本发明涉及交通安全评价领域,涉及一种基于风险组合模式的过街通道安全评价方法,特别涉及一种基于行人风险感知与驾驶员行为风险组合模式的过街通道安全评价的方法。
背景技术:
2.随着出行需求和交通量的增长,与行人相关的交通事故数量正在增长,特别是在过街通道区域,由于车辆速度快,让行率低,行人路权难以保障,在交通冲突中往往更容易发生严重事故,因此过街通道的交通安全问题亟待解决。
3.目前,评价过街通道交通安全主要有两种方法:
4.一种是基于事故数的交通安全评价方法,由于过街通道交通事故随机性大,观测可行性低,导致事故数据通常样本量少,难以支持交通安全分析与评价的工作;
5.另一种是基于交通冲突的交通安全评价方法,这种方法可以提供大量的交通冲突数据支持统计分析,数据采集速度快、难度小,数据质量高,常作为传统交通事故分析的替代安全分析方法,但少有研究从行人风险感知与驾驶员行为角度微观地评价人车冲突与过街通道的交通安全。
技术实现要素:
6.为了解决上述存在的问题,本发明提供一种基于行人风险感知与驾驶员行为风险组合模式的过街通道安全评价的方法,通过聚类模型对过街通道过街行人及冲突车辆驾驶员行为进行划分,组合行人风险感知与驾驶员行为确定风险组合模式,根据风险组合模式模式评价过街通道交通安全,能够较为全面地评价目标过街通道的行人行为、驾驶员行为与交通冲突,为过街通道交通行为与交通安全的综合评价提供了多维全面的方法。
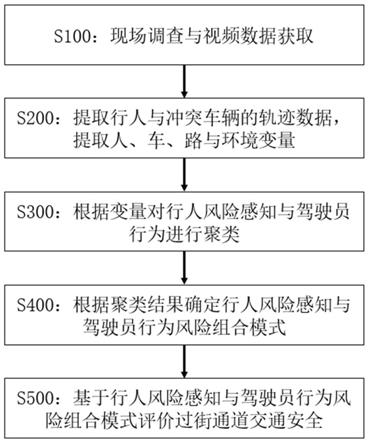
7.本发明提供的基于行人风险感知与驾驶员行为风险组合模式的过街通道安全评价的方法,通过以下步骤实现:
8.步骤一,现场调查与视频数据获取:
9.以过街通道及其上下游40米范围内机动车道作为研究对象,采集视频数据,包括可能发生交通冲突的过街行人及上下游冲突车辆的轨迹及特征数据,以及环境变量。其中的视频数据采用路侧摄像机与无人机航拍摄像机同步拍摄的方法获取,航拍摄像机于80米以上高度稳定拍摄过街通道及其上下游40米范围内机动车道,路侧摄像机于路缘拍摄过街通道范围。
10.步骤二,提取行人与冲突车辆的轨迹数据,提取人、车、路与环境变量:
11.应用计算机软件辅助提取航拍视频中过街行人与冲突车辆的运动轨迹数据,包括视频各帧对应的时刻t、行人与车辆的位置(行人横坐标x
ped
,行人纵坐标y
ped
,车辆横坐标x
veh
,车辆纵坐标y
veh
)、速度矢量(行人横向速度v
pedx
,行人纵向速度v
pedy
,车辆横向速度v
vehx
,车辆纵向速度v
vehy
)、加速度矢量(行人横向加速度a
pedx
,行人纵向加速度a
pedy
,车辆横
向加速度a
vehx
,车辆纵向加速度a
vehy
);
12.通过调查视频采集人、车、路与环境变量,包括过街行人年龄组a(行人为青年时,a=0,行人中存在儿童时,a=1,行人中存在老人时,a=2),成组过街的过街行人数n,过街行人的等待时间tw,过街行人被打断的时间ts,过街行人过街时被打断的次数ns,拒绝间隙的个数nr,过街行人是否在斑马线内过街c(行人在线内过街时,c=1,否则c=0),过街行人是否变速w(行人过街时加速或减速,w=1,否则w=0),接受间隙g,拒绝间隙r,行人过街速度sp,过街行人过街时与冲突车辆的距离d,车辆上游速度sv,车型t(小轿车t=0,否则t=1),车辆运动状态m(车辆停止,m=0,车辆减速,m=1,其他情况,m=2)。
13.步骤三,根据步骤2中提取的变量对行人风险感知与驾驶员行为进行聚类:
14.分别针对过街行人数据和冲突车辆数据,应用两步聚类法对包含连续变量和分类变量的数据进行聚类,将过街行人根据风险感知水平分为高风险感知水平组与低风险感知水平组,将冲突车辆的驾驶员根据行为特征分为侵略性驾驶组和谨慎驾驶组。
15.上述两步聚类法包括预聚类与聚类两个阶段:
16.在预聚类阶段,假设连续型变量服从正态分布,分类变量服从多项式分布,采用对数似然距离衡量集群相似度,逐个读取样本并预先聚类相似度高的密集数据,形成子簇。对数似然距离的具体计算方法如下:
17.d(i,j)=ε
i
ε
j
‑
ε
<i,j>
ꢀꢀꢀ
(1)
18.在公式(1)中
[0019][0020]
在公式(2)中
[0021][0022]
其中,d(i,j)为分类i与分类j的对数似然距离,n
i
是分类i的样本数,m
a
是连续型变量的数量,m
b
是分类变量的数量,是第m个连续型变量的方差,是分类i中第m个连续型变量的方差,l
m
是第m个分类变量的类别数,n
iml
是分类i中第m个分类变量取值为第l个类别的样本数,<i,j>表示由分类i和分类j合并的分类。
[0023]
在聚类阶段,使用凝聚法将子簇递归合并,在预聚类得到h的个子簇中,将距离最近的两个子簇合并为一个,得到新的h
‑
1个子簇,然后合并新的h
‑
1个子簇中距离最近的两个子簇,以此类推,最终输出满足期望簇数的聚类结果。
[0024]
行人风险感知聚类应用的变量为:成组过街的行人数n,行人的等待时间tw,行人被打断的时间ts,行人过街时被打断的次数ns,拒绝间隙的个数nr,行人是否在斑马线内过街c,行人是否变速w,接受间隙g,拒绝间隙r,行人过街速度sp,行人过街时与冲突车辆的距离d,车型t,车辆运动状态m。行人风险感知聚类的期望簇数为2,根据聚类结果的聚类特征,将分类结果分为高风险感知组和低风险感知组。
[0025]
驾驶员行为聚类应用的变量为:冲突车辆速度均值、加速度均值、速度标准差、加速度标准差,提取方法为,将过街通道上下游各40米路段分割为5米长度的计算区域,通过
步骤二中提取的轨迹数据计算目标车辆在各计算区域内的速度值、加速度值,车辆速度均值为各计算区域速度值的平均值,加速度均值为各计算区域加速度值的平均值,速度标准差为各计算区域的速度值的标准差,加速度标准差为各计算区域加速度值的标准差。驾驶员行为聚类的期望簇数为2,根据聚类结果的聚类特征,将分类结果分为侵略性驾驶组和谨慎驾驶组。
[0026]
步骤四,根据聚类结果确定行人风险感知与驾驶员行为风险组合模式:
[0027]
结合行人风险感知聚类和驾驶员行为聚类结果确定风险组合模式。行人风险感知聚类和驾驶员行为聚类结果确定的风险组合模式包括:过街行人低风险感知水平、驾驶员侵略性驾驶的第一模式,过街行人高风险感知水平、驾驶员侵略性驾驶的第二模式,过街行人低风险感知水平、驾驶员谨慎驾驶的第三模式,过街行人高风险感知水平、驾驶员谨慎驾驶的第四模式。
[0028]
步骤五,基于行人风险感知与驾驶员行为风险组合模式评价过街通道交通安全:
[0029]
计算各风险组合模式下的冲突数占受调查的冲突总数比例,根据经验设定各风险组合模式占比的评价阈值,通过比较各风险组合模式所占比例与该风险组合模式评价阈值的相对大小评价过街通道的交通安全:第一模式所占比例高于第一模式评价阈值,代表该过街通道不安全,不能提供良好的风险感知条件与驾驶员行为约束;第二模式所占比例高于第二模式评价阈值,代表该过街通道安全状态一般,为行人感知风险提供了良好的条件,但未能有效地约束驾驶员的危险行为;第三模式所占比例高于第三模式评价阈值,代表该过街通道安全状态一般,有效地约束了驾驶员的危险行为,但未能为行人感知风险提供良好条件;第四模式所占比例高于第四模式评价阈值,代表该过街通道安全状态较好,能提供良好的风险感知条件并约束驾驶员的行为。
[0030]
本发明的有益效果为:通过聚类模型对过街通道过街行人及冲突车辆驾驶员行为进行划分,组合行人风险感知与驾驶员行为确定风险组合模式,根据风险组合模式模式评价过街通道交通安全,能够较为全面地评价目标过街通道的行人行为、驾驶员行为与交通冲突,为过街通道交通行为与交通安全的综合评价提供了多维全面的方法。
附图说明
[0031]
图1为本发明的方法流程示意图;
[0032]
图2为本发明实施例的评价方法流程示意图;
[0033]
图3为本发明实施例的视频数据拍摄范围示意图。
具体实施方式
[0034]
下面结合附图与具体实施例对本发明作详细描述:
[0035]
在一个实施例中,如图1所示,本发明提供一种基于行人风险感知与驾驶员行为风险组合模式的过街通道安全评价的方法,该方法包括以下步骤:
[0036]
s100,采集过街通道及其上下游机动车道的视频数据;
[0037]
s200,提取视频数据中过街行人与冲突车辆的轨迹数据,人、车、路与环境变量;
[0038]
s300,分别针对过街行人数据和和冲突车辆数据,应用两步聚类法进行聚类,将过街行人根据风险感知水平分为高风险感知水平组与低风险感知水平组,将冲突车辆的驾驶
员根据行为特征分为侵略性驾驶组和谨慎驾驶组;
[0039]
s400,根据s300的聚类结果,确定风险组合模式;
[0040]
s500,根据各风险组合模式下的人车冲突占比,评价过街通道交通安全。
[0041]
在一个实施例中,s100具体包括:以过街通道及其上下游40米范围内机动车道作为研究对象,通过视频数据采集的数据集包括可能发生交通冲突的过街行人及上下游冲突车辆的轨迹及特征数据,以及环境变量。其中的视频数据采用路侧摄像机与无人机航拍摄像机同步拍摄的方法获取,航拍摄像机于80米以上高度稳定拍摄过街通道及其上下游40米范围内机动车道,路侧摄像机于路缘拍摄过街通道范围。
[0042]
在一个实施例中,s200具体包括:应用计算机软件辅助提取航拍视频中过街行人与冲突车辆的运动轨迹数据,包括视频各帧对应的时刻t、行人与车辆的位置(行人横坐标x
ped
,行人纵坐标y
ped
,车辆横坐标x
veh
,车辆纵坐标y
veh
)、速度矢量(行人横向速度v
pedx
,行人纵向速度v
pedy
,车辆横向速度v
vehx
,车辆纵向速度v
vehy
)、加速度矢量(行人横向加速度a
pedx
,行人纵向加速度a
pedy
,车辆横向加速度a
vehx
,车辆纵向加速度a
vehy
);通过调查视频采集人、车、路与环境变量,包括过街行人年龄组a(行人为青年时,a=0,行人中存在儿童时,a=1,行人中存在老人时,a=2),成组过街的过街行人数n,过街行人的等待时间tw,过街行人被打断的时间ts,过街行人过街时被打断的次数ns,拒绝间隙的个数nr,过街行人是否在斑马线内过街c(行人在线内过街时,c=1,否则c=0),过街行人是否变速w(行人过街时加速或减速,w=1,否则w=0),接受间隙g,拒绝间隙r,行人过街速度sp,过街行人过街时与冲突车辆的距离d,车辆上游速度sv,车型t(小轿车t=0,否则t=1),车辆运动状态m(车辆停止,m=0,车辆减速,m=1,其他情况,m=2)。
[0043]
在一个实施例中,s300具体包括:分别针对过街行人数据和冲突车辆数据,应用两步聚类法对包含连续变量和分类变量的数据进行聚类,将过街行人根据风险感知水平分为高风险感知水平组与低风险感知水平组,将冲突车辆的驾驶员根据行为特征分为侵略性驾驶组和谨慎驾驶组。
[0044]
上述两步聚类法包括预聚类与聚类两个阶段:
[0045]
在预聚类阶段,假设连续型变量服从正态分布,分类变量服从多项式分布,采用对数似然距离衡量集群相似度,逐个读取样本并预先聚类相似度高的密集数据,形成子簇。对数似然距离的具体计算方法如下:
[0046]
d(i,j)=ε
i
ε
j
‑
ε
<i,j>
ꢀꢀꢀ
(1)
[0047]
在公式(1)中
[0048][0049]
在公式(2)中
[0050][0051]
其中,d(i,j)为分类i与分类j的对数似然距离,n
i
是分类i的样本数,m
a
是连续型变量的数量,m
b
是分类变量的数量,是第m个连续型变量的方差,是分类i中第m个连续
型变量的方差,l
m
是第m个分类变量的类别数,n
iml
是分类i中第m个分类变量取值为第l个类别的样本数,<i,j>表示由分类i和分类j合并的分类。
[0052]
在聚类阶段,使用凝聚法将子簇递归合并,在预聚类得到h的个子簇中,将距离最近的两个子簇合并为一个,得到新的h
‑
1个子簇,然后合并新的h
‑
1个子簇中距离最近的两个子簇,以此类推,最终输出满足期望簇数的聚类结果。
[0053]
行人风险感知聚类应用的变量为:成组过街的行人数n,行人的等待时间tw,行人被打断的时间ts,行人过街时被打断的次数ns,拒绝间隙的个数nr,行人是否在斑马线内过街c,行人是否变速w,接受间隙g,拒绝间隙r,行人过街速度sp,行人过街时与冲突车辆的距离d,车型t,车辆运动状态m。行人风险感知聚类的期望簇数为2,根据聚类结果的聚类特征,将分类结果分为高风险感知组和低风险感知组。
[0054]
驾驶员行为聚类应用的变量为:冲突车辆速度均值、加速度均值、速度标准差、加速度标准差,提取方法为,将过街通道上下游各40米路段分割为5米长度的计算区域,通过步骤二中提取的轨迹数据计算目标车辆在各计算区域内的速度值、加速度值,车辆速度均值为各计算区域速度值的平均值,加速度均值为各计算区域加速度值的平均值,速度标准差为各计算区域的速度值的标准差,加速度标准差为各计算区域加速度值的标准差。驾驶员行为聚类的期望簇数为2,根据聚类结果的聚类特征,将分类结果分为侵略性驾驶组和谨慎驾驶组。
[0055]
在一个实施例中,s400具体包括:结合行人风险感知聚类和驾驶员行为聚类结果确定风险组合模式。行人风险感知聚类和驾驶员行为聚类结果确定的风险组合模式包括:过街行人低风险感知水平、驾驶员侵略性驾驶的第一模式,过街行人高风险感知水平、驾驶员侵略性驾驶的第二模式,过街行人低风险感知水平、驾驶员谨慎驾驶的第三模式,过街行人高风险感知水平、驾驶员谨慎驾驶的第四模式。
[0056]
在一个实施例中,s500具体包括:
[0057]
计算各风险组合模式下的冲突数占受调查的冲突总数比例,根据经验设定各风险组合模式占比的评价阈值,通过比较各风险组合模式所占比例与该风险组合模式评价阈值的相对大小评价过街通道的交通安全:第一模式所占比例高于第一模式评价阈值,代表该过街通道不安全,不能提供良好的风险感知条件与驾驶员行为约束;第二模式所占比例高于第二模式评价阈值,代表该过街通道安全状态一般,为行人感知风险提供了良好的条件,但未能有效地约束驾驶员的危险行为;第三模式所占比例高于第三模式评价阈值,代表该过街通道安全状态一般,有效地约束了驾驶员的危险行为,但未能为行人感知风险提供良好条件;第四模式所占比例高于第四模式评价阈值,代表该过街通道安全状态较好,能提供良好的风险感知条件并约束驾驶员的行为。
[0058]
在一个实施例中,提供了一种基于风险组合模式的过街通道安全评价装置,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述基于风险组合模式的过街通道安全评价方法的步骤。
[0059]
在一个实施例中,提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述基于风险组合模式的过街通道安全评价方法的步骤。
[0060]
本领域普通技术人员可以理解实现上述实施例方法中的全部或部分流程,是可以通过计算机程序来指令相关的硬件来完成,所述的计算机程序可存储于一非易失性计算机
可读取存储介质中,该计算机程序在执行时,可包括如上述各方法的实施例的流程。其中,本技术所提供的各实施例中所使用的对存储器、存储、数据库或其它介质的任何引用,均可包括非易失性和/或易失性存储器。非易失性存储器可包括只读存储器(rom)、可编程rom(prom)、电可编程rom(eprom)、电可擦除可编程rom(eeprom)或闪存。易失性存储器可包括随机存取存储器(ram)或者外部高速缓冲存储器。作为说明而非局限,ram以多种形式可得,诸如静态ram(sram)、动态ram(dram)、同步dram(sdram)、双数据率sdram(ddrsdram)、增强型sdram(esdram)、同步链路(synchlink)dram(sldram)、存储器总线(rambus)直接ram(rdram)、直接存储器总线动态ram(drdram)、以及存储器总线动态ram(rdram)等。
[0061]
以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
[0062]
以如图3所示的实际过街通道为例,评价方法如图2所示:
[0063]
步骤一,以过街通道及其上下游40米范围内机动车道作为研究对象,通过视频数据采集的数据集包括可能发生交通冲突的过街行人及上下游冲突车辆的轨迹及特征数据,以及环境变量。其中的视频数据采用路侧摄像机与无人机航拍摄像机同步拍摄的方法获取,航拍摄像机于80米以上高度稳定拍摄过街通道及其上下游40米范围内机动车道,路侧摄像机于路缘拍摄过街通道范围。
[0064]
步骤二,提取行人与冲突车辆的轨迹数据,提取人、车、路与环境变量:
[0065]
根据步骤一和步骤二得到的相关数据如表1,表2所示。
[0066]
表1行人与车辆轨迹数据采集表
[0067][0068][0069]
表2人、车、路与环境变量数据采集表
[0070][0071]
步骤三,根据变量对行人风险感知与驾驶员行为进行聚类。
[0072]
步骤四,根据聚类结果确定行人风险感知与驾驶员行为风险组合模式。
[0073]
步骤五,基于行人风险感知与驾驶员行为风险组合模式评价过街通道交通安全。
[0074]
该实施例中第一模式占比16.3%,高于所在区域平均水平(15.1%),第二模式占比18.7%,低于所在区域平均水平(24.5%),第三模式占比35.9%,高于所在区域平均水平(27.7%),第四模式占比29.2%,低于所在区域平均水平(32.7%),即说明该过街通道安全状态较差,不能提供良好的风险感知条件与驾驶员行为约束,尤其在行人风险感知方面,未能为行人感知风险提供良好条件。
[0075]
以上所述,是本发明的具体实施例,并非是对本发明作任何其他形式的限制,依据本发明的技术实质所作的任何修改或等同变化,仍属于本发明所要求保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。