1.本发明属于农业机械技术领域,特别涉及一种红花全域多模块智能采收机器人及其控制方法。
背景技术:
2.红花是我国特色的经济作物,药用价值和经济价值高,需求量不断增大。随着卫星导航技术发展,红花种植模式逐步规范,红花种植可根据卫星导航规划路径,等行距规范种植逐渐推广,为采收机器人的多行同步作业奠定了基础;然而,由于不同红花种植区域种植模式不同,加之植株生长、自然环境影响等因素,造成红花种植行距不尽相同,导致红花的多行机械化采收实时调整困难,无法进行多行采收,极大限制了采收机器人采收效率的提升;另外现有的装置基本采用单个或者多个机械臂进行采收,暂未见根据红花果球分布规律进行仿形采收的机具,无法同时采收多个果球上的花丝,也限制了红花采收效率的提升;当前红花采摘机器人的末端执行器切削方式较为粗糙,对通过对花装置的缩颈切削情况不理想,切削范围过大且刀具转速要求高,造成花丝采净率较低。
3.如中国发明专利申请“一种直角坐标红花采摘机器人”,申请号:cn 109673263 a,虽然一定程度上实现了红花的自动化采摘,但单支机械臂效率较低,采摘速度较慢;中国发明专利申请“红花花丝咬合式并联采摘机器人”,申请号:cn 111955164 a,布置有四只机械臂,但单只机械臂对应的工作区域较大,机械臂运动频繁,不利于采收效率的进一步提高;且现有红花采摘机器人多为单行采摘,难以拓展到多行采摘。
技术实现要素:
4.针对上述技术问题,本发明的目的是提供一种红花全域多模块智能采收机器人及其控制方法。采用标准化可拓展的模块化设计,可根据不同的红花种植模式,有选择的加装多个采收模块,通过卫星定位系统获取种植时的规划路径,并利用单目相机实时识别种植行距,实时调节采收模块间距,对红花种植行进行行距可调的多行采收;单个采收模块采用全域设计,针对红花的果球分布模式,将果球分布范围划分多个果球分布高度不同的采摘格,每个采摘格对应一个完全覆盖果球分布高度的末端执行器,实现红花植株全域的分段分格采收;通过刀具精细分区,利用单电机实现花丝的推拢
‑
聚集
‑
切削,降低刀具转速要求,提高切削质量。
5.为了实现上述目的,本发明提供了如下技术方案:一种红花全域多模块智能采收机器人,包括机架1、全域红花采收模块2、辅助模块3和控制系统4;所述机架1包括主机架1
‑
1、模块拓展架1
‑
2、行走轮组1
‑
3、拓展架安装轨1
‑
4和调平伸缩杆1
‑
5;主机架1
‑
1与安装于下部的全域红花采收模块2中轴线重合;四个所述行走轮组1
‑
3分别固接于所述主机架1
‑
1四个支撑腿末端。
6.所述主机架1
‑
1上端设有一对左右对称的调平杆支撑架1
‑1‑
1。
7.所述拓展架安装轨1
‑
4包括拓展架安装a轨1
‑4‑
1和拓展架安装b轨1
‑4‑
2。
8.所述全域红花采收模块2包括花丝收集装置2
‑
1、末端执行器导向安装架2
‑
2和末端执行器组2
‑
3;所述末端执行器组2
‑
3包括多个直线排布的采摘末端执行器单体2
‑3‑
1。
9.所述花丝收集系统2
‑
1包括花丝收集箱2
‑1‑
1、花丝收集软管2
‑1‑
2和负压风机2
‑1‑
3;所述花丝收集箱2
‑1‑
1通过上端面中部设置的收集箱安装块2
‑1‑1‑
1固接于主机架1
‑
1安装板的下端面,花丝收集软管2
‑1‑
2连接花丝收集箱2
‑1‑
1与采摘末端执行器单体2
‑3‑
1,负压风机2
‑1‑
3设置于花丝收集箱2
‑1‑
1前后两侧。
10.所述末端执行器导向安装架2
‑
2包括齿条安装架2
‑2‑
1和滑轮导轨2
‑2‑
2;所述齿条安装架2
‑2‑
1安装于花丝收集箱2
‑1‑
1下端面,一对前后对称的滑轮导轨2
‑2‑
2安装于齿条安装架2
‑2‑
1下端面。
11.所述采摘末端执行器单体2
‑3‑
1包括水平对准装置2
‑3‑1‑
1、竖直对准丝杠2
‑3‑1‑
2和花丝采摘装置2
‑3‑1‑
3。
12.所述水平对准装置2
‑3‑1‑
1包括水平运动齿条2
‑3‑1‑1‑
1、水平运动电机2
‑3‑1‑1‑
2、水平运动齿轮2
‑2‑1‑1‑
3、滑轮架2
‑3‑1‑1‑
4和运动滑轮2
‑3‑1‑1‑
5;多个直线布置的水平运动齿条2
‑3‑1‑1‑
1固接于齿条安装架2
‑2‑
1前后两端,水平运动电机2
‑3‑1‑1‑
2的动力输出轴上设有与水平运动齿条2
‑3‑1‑1‑
1相互啮合的水平运动齿轮2
‑3‑1‑1‑
3;所述水平运动齿轮2
‑3‑1‑1‑
3可绕齿轮轴旋转地固接于竖直对准丝杠2
‑3‑1‑
2后端;所述运动滑轮2
‑3‑1‑1‑
5可滑动地安装于滑轮导轨2
‑2‑
2的滑轮槽内,通过滑轮架2
‑3‑1‑1‑
4与竖直对准丝杠2
‑3‑1‑
2连接。
13.所述水平运动电机2
‑3‑1‑1‑
2带动水平运动齿轮2
‑3‑1‑1‑
3旋转,水平运动齿轮2
‑3‑1‑1‑
3在相互啮合的水平运动齿条2
‑3‑1‑1‑
1上左右移动,实现采摘末端执行器单体2
‑3‑
1的水平移动。
14.所述竖直对准丝杠2
‑3‑1‑
2包括丝杆安装座2
‑3‑1‑2‑
1、丝杠轴2
‑3‑1‑2‑
2和滚珠套2
‑3‑1‑2‑
3;所述丝杠轴2
‑3‑1‑2‑
2通过轴承及轴承座与丝杆安装座2
‑3‑2‑1‑
1上下两端连接,滚珠套2
‑3‑1‑2‑
3与丝杠轴2
‑3‑1‑2‑
2相互啮合,并可沿丝杠轴2
‑3‑1‑2‑
2竖直移动。
15.所述花丝采摘装置2
‑3‑1‑
3包括弧形对花罩2
‑3‑1‑3‑
1、采摘室壳体2
‑3‑1‑3‑
2、采摘室盖板2
‑3‑1‑3‑
3、刀具电机2
‑3‑1‑3‑
4和渐进凸轮刀2
‑3‑1‑3‑
5。
16.所述采摘室壳体2
‑3‑1‑3‑
2上端面卡槽连接采摘室盖板2
‑3‑1‑3‑
3组成用于容纳渐进凸轮刀2
‑3‑1‑3‑
5的采摘室腔体2
‑3‑1‑3‑
6,下端面设有花丝进口2
‑3‑1‑3‑
7;所述弧形对花罩2
‑3‑1‑3‑
1螺钉连接于采摘室壳体2
‑3‑1‑3‑
2下端面并与花丝进口2
‑3‑1‑3‑
7圆心同轴;所述刀具电机2
‑3‑1‑3‑
4固接在采摘室盖板2
‑3‑1‑3‑
3上端面,电机动力输出轴连接渐进凸轮刀2
‑3‑1‑3‑
5。
17.所述采摘室壳体2
‑3‑1‑3‑
2与滚珠套2
‑3‑1‑2‑
3通过螺钉连接,花丝采摘装置2
‑3‑1‑
3可随滚珠套2
‑3‑1‑2‑
3竖直运动。
18.所述花丝进口2
‑3‑1‑3‑
7上端设有切花砧2
‑3‑1‑3‑
8。
19.所述弧形对花罩2
‑3‑1‑3‑
1的下端直径为对花直径d1,对花直径d1为红花果球直径
φ1的1.4~1.6倍,能够实现对准果球功能。
20.所述辅助模块3包括电池组3
‑
1、太阳能电池板3
‑
2和辅助光源灯3
‑
3。
21.所述电池组3
‑
1包括主电池3
‑1‑
1和备用电池3
‑1‑
2。
22.所述主电池3
‑1‑
1安装在主机架1
‑
1的安装板上部,太阳能电池板3
‑
2可拆卸地安装于模块拓展架1
‑
2上端面,辅助光源灯3
‑
3可拆卸地安装于主机架1
‑
1与模块拓展架1
‑
2下端面四角。
23.所述控制系统4,包括卫星定位系统4
‑
1、采收模块对行定位系统4
‑
2和控制模块4
‑
3。
24.所述卫星定位系统4
‑
1通过安装杆固接于主机架1
‑
1前部,采收模块对行定位系统4
‑
2固接于花丝收集箱2
‑1‑
1前后两端,控制模块4
‑
3固接于在主机架1
‑
1的安装板上部前端。
25.所述采收模块对行定位系统4
‑
2包括相机安装架4
‑2‑
1、单目相机4
‑2‑
2和双目相机4
‑2‑
3。
26.所述相机安装架4
‑2‑
1固接于花丝收集箱2
‑1‑
1前后两端;所述单目相机4
‑2‑
2和双目相机4
‑2‑
3通过卡槽安装于相机安装架4
‑2‑
1上,所述单目相机4
‑2‑
1安装于所述双目相机4
‑2‑
2上方。
27.所述主机架1
‑
1上部左右两侧对称地安装两组拓展架安装a轨1
‑4‑
1。
28.所述两组拓展架安装a轨1
‑4‑
1通过转轴左右对称地固接于主机架1
‑
1上部左右两侧,可通过转轴实现拓展架安装a轨1
‑4‑
1以主机架1
‑
1左右两边缘为轴线的旋转;所述拓展架安装a轨1
‑4‑
1轨条平行于采收机器人前进方向。
29.所述模块拓展架1
‑
2包括拓展架体1
‑2‑
1和采收模块运动滑台1
‑2‑
2。
30.所述拓展架体1
‑2‑
1左右两侧对称地固接一组拓展架安装b轨1
‑4‑
2与一组拓展架安装a轨1
‑4‑
1;所述拓展架安装b轨1
‑4‑
2与主机架1
‑4‑
1一侧固接的拓展架安装a轨1
‑4‑
1配合安装。
31.所述固接于拓展架体1
‑2‑
1的拓展架安装a轨1
‑4‑
1可与另一模块拓展架1
‑
2的拓展架安装b轨1
‑4‑
2配合安装,加装另一个模块拓展架1
‑
2。
32.所述模块拓展架1
‑
2与主机架1
‑
1配合安装后,拓展架体1
‑2‑
1可通过调平伸缩杆1
‑
5与调平杆支撑架1
‑1‑
1连接。
33.所述采收模块运动滑台1
‑2‑
2垂直于拓展架安装b轨1
‑4‑
2导条方向。
34.所述采收模块运动滑台1
‑2‑
2包括滑台伺服电机1
‑2‑2‑
1、滑台丝杆1
‑2‑2‑
2、滑台安装座1
‑2‑2‑
3和滑台滑块1
‑2‑2‑
4。
35.所述滑台滑块1
‑2‑2‑
4可滑动地套接在滑台安装座1
‑2‑2‑
3的两根滑柱上,通过滑台伺服电机1
‑2‑2‑
1驱动滑台丝杆1
‑2‑2‑
2实现左右移动。
36.所述两相邻全域红化采收模块2的水平距离为采收模块间距l,采收模块间距l可调,适应不同的红花种植行距。
37.所述滑台丝杆1
‑2‑2‑
2的长度为滑台丝杆长度l1,其范围为100~550mm;红花采收模块2随滑台滑块1
‑2‑2‑
4沿滑台丝杆1
‑2‑2‑
2左右移动,实现采收模块间距l在100~550mm范围内的调整。
38.所述调平伸缩杆1
‑
5通过螺栓固接于调平杆支撑架1
‑1‑
1和拓展架体1
‑2‑
1的安装
吊耳上;所述调平伸缩杆1
‑
5长度可调,实现模块拓展架1
‑
2与主机架1
‑
1的拉紧固定与模块拓展架1
‑
2在竖直方向的角度可调。
39.所述拓展架安装轨1
‑
4采用皮卡汀尼导轨式设计,可实现模块快速插接。
40.所述备用电池3
‑1‑
2安装于拓展架安装b轨1
‑4‑
2上端,可根据实际情况选装于主机架1
‑
1和模块拓展架1
‑
2固接的拓展架安装a轨1
‑4‑
1上。
41.所述渐进凸轮刀2
‑3‑1‑3‑
5的外围轮廓曲线为abc连线,外围轮廓曲线由a
‑
b曲线、b
‑
c曲线、c
‑
a直线组成;所述渐进凸轮刀2
‑3‑1‑3‑
5与刀具电机2
‑3‑1‑3‑
4动力输出轴连接处的圆心为凸轮刀轴心o1;g为abc连线上任一点,g
‑
o1直线的长度为凸轮刀径r,g
‑
o1直线与o1‑
a直线的夹角为螺旋曲线角α。
42.所述a
‑
b曲线为一条在以凸轮刀轴心o1为极坐标原点,以o1‑
a直线为极轴的极坐标内的阿基米德螺旋曲线,其方程为r=e(α 90
°
),其中,e为螺旋常数;在a
‑
b曲线范围内,螺旋曲线角α的取值为0
°
~γ1,γ1为推拢面角,其范围为255
°
~275
°
;且当α=γ1时,g点与b点重合,凸轮刀径r达到最大值,为最大切刀径r3。
43.所述渐进凸轮刀2
‑3‑1‑3‑
5在a
‑
b曲线内的部分为花丝推拢面2
‑3‑1‑3‑5‑
1。
44.所述b
‑
c曲线为以凸轮刀轴心o1为圆心,以最大切刀径r3为半径的圆弧;在b
‑
c曲线内,螺旋曲线角α的取值范围为γ1~γ2,γ2为切削区角,其范围为300
°
~325
°
;且当α=γ2时,g点与c点重合。
45.所述渐进凸轮刀2
‑3‑1‑3‑
5在b
‑
c曲线内的部分为花丝切削刃2
‑3‑1‑3‑5‑
2。
46.所述渐进凸轮刀(2
‑3‑1‑3‑
5)在c
‑
a曲线内的部分为刀具回收区(2
‑3‑1‑3‑5‑
3),凸轮刀径r减小,便于让出花丝进口(2
‑3‑1‑3‑
7)的空间,减小刀具对果球造成的二次损伤。
47.所述花丝进口2
‑3‑1‑3‑
7的外围轮廓曲线为两条圆弧曲线,分别为花丝进口曲线p1与切花砧内曲线p2,切花砧内曲线p2也是切花砧2
‑3‑1‑3‑
8的内圈曲线;所述切花砧内曲线p2为半径r3的圆弧,且与渐进凸轮刀2
‑3‑1‑3‑
5的b
‑
c曲线同心。
48.所述花丝切削刃2
‑3‑1‑3‑5‑
2的宽度l2为果球缩颈直径φ2的1.0~1.2倍,能够完成对缩颈的全部切削;所述花丝切削刃2
‑3‑1‑3‑5‑
2的长度l3为果球缩颈直径φ2的3.0倍,实现在推拢后缩颈的切割。所述齿条安装架2
‑2‑
1的宽度为采收覆盖宽度l4,与红花分布圆环截面外径r1的关系为l4≥2r1。
49.所述末端执行器组2
‑
3中多个直线排布的采摘末端执行器单体2
‑3‑
1,按照中央格、两侧格、边缘格布置,根据不同格中果球分布范围深度不同,设置不同的竖直对准丝杠2
‑3‑1‑
2长度,分别为中央丝杠长度n1,两侧丝杠长度n2和边缘丝杠长度n3;每个格中,由果球分布范围最高点到每格采摘格中果球分布范围最低点的距离为分布深度,分别为中央分布深度m1,两侧分布深度m2和边缘分布深度m3,n1≥m1,n2≥m2,n3≥m3,实现红花植株的全域采收。
50.所述水平运动齿条2
‑3‑1‑1‑
1的长度为水平齿条长度l5;通过设置不同的水平齿条长度l5,每个末端执行器组2
‑
3可设置不同数量的采摘末端执行器单体2
‑3‑
1。
51.所述电池组3
‑
1分别与滑台伺服电机1
‑2‑2‑
1、行走轮组1
‑
3电机、负压风机2
‑1‑
3、水平运动电机2
‑3‑1‑1‑
2、滚珠套2
‑3‑1‑2‑
3、刀具电机2
‑3‑1‑3‑
4、辅助光源灯3
‑
3、卫星定位系统4
‑
1、单目相机4
‑2‑
2和双目相机4
‑2‑
3、控制模块4
‑
3连接。
52.所述控制模块4
‑
3分别与滑台伺服电机1
‑2‑2‑
1、行走轮组1
‑
3电机、负压风机2
‑1‑
3、水平运动电机2
‑3‑1‑1‑
2、滚珠套2
‑3‑1‑2‑
3、刀具电机2
‑3‑1‑3‑
4、电池组3
‑
1、辅助光源灯3
‑
3、卫星定位系统4
‑
1、单目相机4
‑2‑
2和双目相机4
‑2‑
3、控制模块4
‑
3连接。
53.一种红花全域多模块智能采收机器人控制方法,包括如下步骤:s1、操作控制模块4
‑
3,采收机器人进入初始状态;所述卫星定位系统4
‑
1定位机器人当前位置,并根据播种时的路径信息规划采收路径,在行走轮组1
‑
3的带动下运动到起始位置;所述主机架前部的单目相机4
‑2‑
2定位红花种植行,使主机架1
‑
1安装的全域红花采收模块2对准中央红花种植行;所述主机架1
‑
1两侧的全域红花采收模块2安装的单目相机4
‑2‑
2识别所在外侧红花种植行,并定位外侧红花种植行与中央红花种植行的行距q1、q2;所述滑台伺服电机1
‑2‑2‑
1驱动滑台丝杆1
‑2‑2‑
2运动,使全域红花采收模块2左右移动,调节两侧全域红花采收模块2与中央的全域红花采收模块2的间距l与q1、q2相同。
54.s2、采收机器人对准红花种植行后进入区域划分状态;控制系统4在红花种植行方向,以采摘段长度u为单位长度将红花种植行划分为若干个采摘段,采摘段长度u与对花直径d1相等,并在每个采摘段内以采摘格宽度v为单位宽度将采摘段划分为5个采摘格;所述采摘格宽度v与水平齿条长度l5相等。
55.s3、区域划分完成后,采收机器人进入目标识别状态;各个全域红花采收模块2安装的双目相机4
‑2‑
3识别前方一个采摘段内的红花果球数量;识别结果包括如下三种条件:条件一:前方未识别到红花种植行;当满足条件一时,采收机器人重新进入初始状态,进行对行动作;条件二:前方一个采摘段内果球数量少于2个;当满足条件二时,标记该采摘段为o采摘段,采收机器人保持目标识别状态并前进一个采摘段长度u,继续识别下一个采摘段;条件三:当前方一个采摘段内果球数量为2个或以上时;当满足条件三时,标记该采摘段为i采摘段;采收机器人定位i采摘段内果球位置,以双目相机4
‑2‑
3安装位置为定位原点o2,平行于水平运动齿条2
‑3‑1‑1‑
1方向为y轴,竖直方向为z轴确定各个红花果球坐标;所述行走轮组1
‑
3移动,采收机器人前进,i采摘段进入工作范围。
56.s4、i采摘段进入工作范围后,将i采摘段标记为i工作段;根据果球的y轴坐标,每个采摘格对应的采摘末端执行器单体2
‑3‑
1在水平对准装置2
‑3‑1‑
1的带动下,沿水平运动齿条2
‑3‑1‑1‑
1运动到果球上方,并根据果球的z轴坐标,竖直对准丝杠2
‑3‑1‑
2带动花丝采摘装置2
‑3‑1‑
3向下运动到采收位置,使果球进入弧形对花罩2
‑3‑1‑3‑
1,花丝通过花丝进口2
‑3‑1‑3‑
7,位于采摘室腔体2
‑3‑1‑3‑
6;所述刀具电机2
‑3‑1‑3‑
4启动,带动渐进凸轮刀2
‑3‑1‑3‑
5转动,完成花丝切削;切削后的花丝在负压作用下经花丝收集软管2
‑1‑
2进入花丝收集箱2
‑1‑
1,完成一次红花采摘;花丝采摘完成后,所述花丝采摘装置2
‑3‑1‑
3向上提升,准备采收所在采摘格内其他红花,直至该i工作段内红花全部采收完成。
57.s5、当采收机器人进入采收状态时,同步地进入目标识别状态,并等待采收状态结束后执行下一步动作。
58.与现有技术相比,本发明的有益效果在于:1.机器人采用标准化可拓展模块化设计,并通过模块实时调整,实现对多行红花不同行距的采收。通过皮卡汀尼式的拓展安装架a、b轨实现模块安装架1
‑
2的自由加装,可
选装多个全域红花采收模块2,并通过每个全域红化采收模块2加装的采收模块对行定位系统4
‑
2,实时判断行距,并根红花种植行行距调节相邻两采收模块间距l,实现红花的适应性多行采收。
59.2.建立植株模型与果球分布模型看,为采收算法提供较为理想的环境。单株红花果球分布范围截面可近似为圆心为o3,外径r1,内径r2的半圆环,则红花成行种植时,红花果球分布范围可近似为半圆环延伸的柱体,果球分布于柱体范围内,则可根据红花分布范围的柱体模型设计布置采收装置,提高采收效率。
60.3.拟合红花种植行的果球分布模型,实现全域分段分格采收。根据弧形对花罩2
‑3‑1‑3‑
1下部直径,即对花直径d1将红花分布的柱体模型沿柱体宽度方向划分为多个采摘段;每个采摘段内果球分布最高位置与最低位置不同,则每个采收格对应一个竖直对准丝杠2
‑3‑1‑
2长度不同的采摘末端执行器单体2
‑
2,实现对每个采收格内红花分布范围的全包裹;通过全域分段分格采收,提升了采收效率。
61.4.通过采收策略的制定,最大化地提高采收机器人的采收效率。通过分析采摘段内红花分布与数量,规划采摘工作,不对果球数较少的采摘段进行采摘,以提高采摘效率。当前方采摘段内红花果球数量少于2个时,控制模块4
‑
3将该采摘段标记为o采摘段,不对该采摘段执行采摘动作;当前方采摘段内红花果球数量为2个或以上时,将该采摘段标记为i采摘段,对该采摘段执行采摘动作。
62.5.刀具精细分区设计,花丝分段精准切割。使用电机带动刀具实现花丝的推拢
‑
聚集
‑
切削,降低刀具转速要求,提高切削质量;将渐进凸轮刀2
‑3‑1‑3‑
5依据外轮廓线设计为三个不同功能区,通过刀具的单一回转动作实现花丝推拢、花丝切削与刀具回收;2
‑3‑1‑3‑5‑
1花丝推拢面将花丝进口2
‑3‑1‑3‑
7内的花丝推拢聚集至切花砧2
‑3‑1‑3‑
8处;花丝切削刃2
‑3‑1‑3‑5‑
2边缘刀刃与切花砧2
‑3‑1‑3‑
8内壁配合,形成对花丝的支撑切割,降低切削速度要求;刀具回收区2
‑3‑1‑3‑5‑
3让出花丝进口2
‑3‑1‑3‑
7,减小对果球的二次伤害。
63.6.智能化模块设计。通过选择性加装拓展电池、辅助光源灯、太阳能电池板等智能辅助模块,进一步有提升采收适应性。拓展架安装轨1
‑
4采用皮卡汀尼导轨式设计,可实现模块快速插接;拓展架安装a轨1
‑4‑
1与拓展架安装b轨1
‑4‑
2采用轨条等宽等距设计;可在拓展架安装a轨1
‑4‑
1上加装拓展部件,如备用电池3
‑1‑
2或夜间照明灯具等,通过拓展架安装b轨1
‑4‑
2与固接于主机架1
‑
1和模块安装架1
‑
2上的拓展架安装a轨1
‑4‑
2的快速插接,实现多辅助设备的可选快速安装;辅助光源灯3
‑
3分布在主机架1
‑
1模块拓展架1
‑
2的下侧四角,并可自由旋转调节照明方向,辅助夜间与光线阴暗时的采收作业。
64.7.拓展架与主机架角度可调,满足坡地种植要求,实现地形自适应采收。红花生长方向为竖直向上,当地面存在坡度时,需全域红花采收模块2进行角度调整。两组拓展架安装a轨1
‑4‑
1通过转轴左右对称地固接于主机架1
‑
1上部左右两侧,加装模块拓展架1
‑
2后,可实现模块拓展架1
‑
2与主机架1
‑
1的夹角的调节,并由调平伸缩杆1
‑
5实现调节后的固定,从而使模块拓展架1
‑
2下侧加装的全域红花采收模块2的采摘末端执行器单体2
‑3‑
1竖直向下,对竖直向上生长的红花植株进行采收作业,适应地形坡度进行采收。
65.8.多调节机构并行,调节空间大,提高采收机器人的采收适应性。在大田农业生产中,植株行距,采收对象分布,种植地地形地势不尽相同,因此采收机器人采用多个并行的调节机构,使用可选装的模块拓展架1
‑
2可根据实际需要搭载多个采收模块;利用采收模块
运动滑台1
‑2‑
2调节多个全域红花采收模块2的间距l以适应不同的行距;模块拓展架1
‑
2与主机架1
‑
1夹角可调实现地形的自适应性采收;多个采摘末端执行器单体2
‑3‑
1可在全域红花采收模块2采收范围内做水平方向与竖直方向的移动,适应不同的果球分布,满足红花果球分布松散的特点;通过多个调节机构的并行,提高了采收机器人的采收适应性。
附图说明
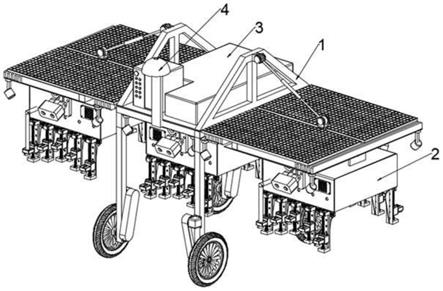
66.图1是本发明的红花全域多模块智能采收机器人的结构示意图;图2是本发明的红花全域多模块智能采收机器人的结构示意图未加装拓展模块;图3是本发明的机架1
‑
1的结构示意图;图4是本发明的模块拓展架1
‑
4的结构示意图;图5是本发明的全域红花采收模块2的结构示意图;图6是本发明的末端执行器导向安装架2
‑
2的结构示意图;图7是本发明的采摘末端执行器单体2
‑3‑
1的结构示意图;图8是红花果球的示意图
‘’
图9是本发明的花丝采摘装置2
‑3‑1‑
3的结构示意图;图10是本发明的花丝采摘装置2
‑3‑1‑
3的内部结构示意图(去除采摘室盖板2
‑3‑1‑3‑
3);图11时本发明的渐进凸轮刀2
‑3‑1‑3‑
5的结构示意图;图12是本发明的花丝进口2
‑3‑1‑3‑
7与切花砧2
‑3‑1‑3‑
8的结构示意图;图13是本发明的花丝采摘装置2
‑3‑1‑
3的待切削状态示意图;图14是本发明的花丝采摘装置2
‑3‑1‑
3的花丝推拢状态示意图;图15是本发明的花丝采摘装置2
‑3‑1‑
3的切削状态示意图;图16是本发明的红花植株模型结构示意图;图17是本发明的全域红花采收模块2的工作状态示意图;图18是本发明的辅助模块3和控制系统4的结构示意图;图19是本发明的电池组3
‑
1的结构示意图;图20是本发明的备用电池3
‑1‑
2的结构示意图;图21是本发明的红花全域多模块智能采收机器人的地形自适应示意图;图22是本发明的红花全域多模块智能采收机器人的多行采收示意图;图23是本发明的控制流程图;其中的附图标记为:1机架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ1‑
1主机架1
‑1‑
1调平杆支撑架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ1‑
2模块拓展架1
‑2‑
1拓展架体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ1‑2‑
2采收模块运动滑台1
‑2‑2‑
1滑台伺服电机
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ1‑2‑2‑
2滑台丝杆1
‑2‑2‑
3滑台安装座
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ1‑2‑2‑
4滑台滑块1
‑
3行走轮组
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ1‑
4拓展架安装轨1
‑4‑
1拓展架安装a轨
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ1‑4‑
2拓展架安装b轨1
‑
5调平伸缩杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2全域红花采收模块
2
‑
1花丝收集装置
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ2‑1‑
1花丝收集箱2
‑1‑1‑
1收集箱安装块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ2‑1‑
2花丝收集软管2
‑1‑
3负压风机
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ2‑
2末端执行器导向安装架2
‑2‑
1齿条安装架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ2‑2‑
2滑轮导轨2
‑
3末端执行器组
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ2‑3‑
1采摘末端执行器单体2
‑3‑1‑
1水平对准装置
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ2‑3‑1‑1‑
1水平运动齿条2
‑3‑1‑1‑
2水平运动电机
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ2‑3‑1‑1‑
3水平运动齿轮2
‑3‑1‑1‑
4滑轮架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ2‑3‑1‑1‑
5运动滑轮2
‑3‑1‑
2竖直对准丝杠
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ2‑3‑1‑2‑
1丝杆安装座2
‑3‑1‑2‑
2丝杠轴
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ2‑3‑1‑2‑
3滚珠套2
‑3‑1‑
3花丝采摘装置
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ2‑3‑1‑3‑
1弧形对花罩2
‑3‑1‑3‑
2采摘室壳体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ2‑3‑1‑3‑
3采摘室盖板2
‑3‑1‑3‑
4刀具电机
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ2‑3‑1‑3‑
5渐进凸轮刀2
‑3‑1‑3‑5‑
1花丝推拢面
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ2‑3‑1‑3‑5‑
2花丝切削刃2
‑3‑1‑3‑5‑
3刀具回收区
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ2‑3‑1‑3‑
6采摘室腔体2
‑3‑1‑3‑
7花丝进口
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ2‑3‑1‑3‑
8切花砧3辅助模块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ3‑
1电池组3
‑1‑
1主电池
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ3‑1‑
2备用电池3
‑
2太阳能电池板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ3‑
3辅助光源灯4控制系统
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ4‑
1卫星定位系统4
‑
2采收模块对行定位系统
ꢀꢀꢀꢀꢀꢀ4‑2‑
1相机安装架4
‑2‑
2单目相机
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ4‑2‑
3双目相机4
‑
3控制模块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
d1对花直径i可采摘段
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
o非采摘段l相邻两采收模块间距
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
l1滑台丝杆长度l2花丝切削刃宽度
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
l3花丝切削刃长度l4采收覆盖宽度
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
l5水平齿条长度m1中央分布深度
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
m2两侧分布深度m3边缘分布深度
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
n1中央丝杠长度n2两侧丝杠长度
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
n3边缘丝杠长度o1凸轮刀轴心
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
o2定位原点p1花丝进口曲线
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
p2切花砧内曲线q
1 q2种植行行距
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
r凸轮刀径r3最大切刀径
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
r1红花分布范围外径r2红花分布范围内径
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
u采摘段长度v采摘格宽度
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
α螺旋曲线角θ地面坡度
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
θ1调平角φ1红花果球直径
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
φ2果球缩颈直径c红花花丝
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
o3植株模型原点。
具体实施方式
67.下面结合附图和实施例对本发明进行进一步说明。
68.如图1,图2,图3所示,一种红花全域多模块智能采收机器人,包括机架1、全域红花采收模块2、辅助模块3和控制系统4;所述机架1包括主机架1
‑
1、模块拓展架1
‑
2、行走轮组1
‑
3、拓展架安装轨1
‑
4和调平伸缩杆1
‑
5;四个所述行走轮组1
‑
3分别固接于所述主机架1
‑
1四个支撑腿末端。
69.可通过四个行走轮组1
‑
3的差速转动实现采收机器人的转向。
70.所述拓展架安装轨1
‑
4包括拓展架安装a轨1
‑4‑
1和拓展架安装b轨1
‑4‑
2;所述主机架1
‑
1上部左右两侧对称地安装两组拓展架安装a轨1
‑4‑
1;所述两组拓展架安装a轨1
‑4‑
1通过转轴左右对称地固接于主机架1
‑
1上部左右两侧,可通过转轴实现拓展架安装a轨1
‑4‑
1以主机架1
‑
1左右两边缘为轴线的旋转;所述拓展架安装a轨1
‑4‑
1轨条平行于采收机器人前进方向。
71.所述主机架1
‑
1上端设有一对左右对称的调平杆支撑架1
‑1‑
1;所述模块拓展架1
‑
2与主机架1
‑
1配合安装后,拓展架体1
‑2‑
1可通过调平伸缩杆1
‑
5与调平杆支撑架1
‑1‑
1连接。
72.如图4所示,所述模块拓展架1
‑
2包括拓展架体1
‑2‑
1和采收模块运动滑台1
‑2‑
2。
73.所述拓展架体1
‑2‑
1左右两侧对称地固接一组拓展架安装b轨1
‑4‑
2与一组拓展架安装a轨1
‑4‑
1;所述拓展架安装b轨1
‑4‑
2与主机架1
‑4‑
1一侧固接的拓展架安装a轨1
‑4‑
1配合安装。
74.所述固接于拓展架体1
‑2‑
1的拓展架安装a轨1
‑4‑
1可与另一模块拓展架1
‑
2的拓展架安装b轨1
‑4‑
2配合安装,加装另一个模块拓展架1
‑
2。
75.所述采收模块运动滑台1
‑2‑
2垂直于拓展架安装b轨1
‑4‑
2导条方向。
76.所述采收模块运动滑台1
‑2‑
2包括滑台伺服电机1
‑2‑2‑
1、滑台丝杆1
‑2‑2‑
2、滑台安装座1
‑2‑2‑
3和滑台滑块1
‑2‑2‑
4。
77.所述滑台滑块1
‑2‑2‑
4可滑动地套接在滑台安装座1
‑2‑2‑
3的两根滑柱上,通过滑台伺服电机1
‑2‑2‑
1驱动滑台丝杆1
‑2‑2‑
2实现左右移动。
78.所述滑台丝杆1
‑2‑2‑
2的长度为滑台丝杆长度l1,其范围为100~550mm;红花采收模块2随滑台滑块1
‑2‑2‑
4沿滑台丝杆1
‑2‑2‑
2左右移动,实现采收模块间距l在100~550mm范围内的调整。
79.如图5所示,所述全域红花采收模块2包括花丝收集装置2
‑
1、末端执行器导向安装架2
‑
2和末端执行器组2
‑
3。
80.所述花丝收集系统2
‑
1包括花丝收集箱2
‑1‑
1、花丝收集软管2
‑1‑
2和负压风机2
‑1‑
3。
81.所述花丝收集箱2
‑1‑
1通过上端面中部设置的收集箱安装块2
‑1‑1‑
1固接于主机架1
‑
1安装板的下端面,花丝收集软管2
‑1‑
2连接花丝收集箱2
‑1‑
1与采摘末端执行器单体2
‑3‑
1,负压风机2
‑1‑
3设置于花丝收集箱2
‑1‑
1前后两侧。
82.如图6所示,所述末端执行器导向安装架2
‑
2包括齿条安装架2
‑2‑
1和滑轮导轨2
‑2‑
2;所述齿条安装架2
‑2‑
1安装于花丝收集箱2
‑1‑
1下端面,一对前后对称的滑轮导轨2
‑2‑
2安装于齿条安装架2
‑2‑
1下端面;所述末端执行器组2
‑
3包括多个直线排布的采摘末端执
行器单体2
‑3‑
1。
83.多个直线布置的水平运动齿条2
‑3‑1‑1‑
1固接于齿条安装架2
‑2‑
1前后两端,水平运动电机2
‑3‑1‑1‑
2的动力输出轴上设有与水平运动齿条2
‑3‑1‑1‑
1相互啮合的水平运动齿轮2
‑3‑1‑1‑
3。
84.所述水平运动齿轮2
‑3‑1‑1‑
3可绕齿轮轴旋转地固接于竖直对准丝杠2
‑3‑1‑
2后端;所述运动滑轮2
‑3‑1‑1‑
5可滑动地安装于滑轮导轨2
‑2‑
2的滑轮槽内,通过滑轮架2
‑3‑1‑1‑
4与竖直对准丝杠2
‑3‑1‑
2连接。
85.如图7所示,所述采摘末端执行器单体2
‑3‑
1包括水平对准装置2
‑3‑1‑
1、竖直对准丝杠2
‑3‑1‑
2和花丝采摘装置2
‑3‑1‑
3。
86.所述水平对准装置2
‑3‑1‑
1包括水平运动齿条2
‑3‑1‑1‑
1、水平运动电机2
‑3‑1‑1‑
2、水平运动齿轮2
‑2‑1‑1‑
3、滑轮架2
‑3‑1‑1‑
4和运动滑轮2
‑3‑1‑1‑
5。
87.所述水平运动电机2
‑3‑1‑1‑
2带动水平运动齿轮2
‑3‑1‑1‑
3旋转,水平运动齿轮2
‑3‑1‑1‑
3在相互啮合的水平运动齿条2
‑3‑1‑1‑
1上左右移动,实现采摘末端执行器单体2
‑3‑
1的水平移动。
88.所述竖直对准丝杠2
‑3‑1‑
2包括丝杆安装座2
‑3‑1‑2‑
1、丝杠轴2
‑3‑1‑2‑
2和滚珠套2
‑3‑1‑2‑
3。
89.所述丝杠轴2
‑3‑1‑2‑
2通过轴承及轴承座与丝杆安装座2
‑3‑2‑1‑
1上下两端连接,滚珠套2
‑3‑1‑2‑
3与丝杠轴2
‑3‑1‑2‑
2相互啮合,并可沿丝杠轴2
‑3‑1‑2‑
2竖直移动。
90.如图8所示,红花的简化结构模型的主要尺寸为:红花果球直径φ1,果球缩颈直径φ2。
91.如图9,图10所示,所述花丝采摘装置2
‑3‑1‑
3包括弧形对花罩2
‑3‑1‑3‑
1、采摘室壳体2
‑3‑1‑3‑
2、采摘室盖板2
‑3‑1‑3‑
3、刀具电机2
‑3‑1‑3‑
4和渐进凸轮刀2
‑3‑1‑3‑
5;所述采摘室壳体2
‑3‑1‑3‑
2上端面卡槽连接采摘室盖板2
‑3‑1‑3‑
3组成用于容纳渐进凸轮刀2
‑3‑1‑3‑
5的采摘室腔体2
‑3‑1‑3‑
6,下端面设有花丝进口2
‑3‑1‑3‑
7;所述弧形对花罩2
‑3‑1‑3‑
1螺钉连接于采摘室壳体2
‑3‑1‑3‑
2下端面并与花丝进口2
‑3‑1‑3‑
7圆心同轴;所述刀具电机2
‑3‑1‑3‑
4固接在采摘室盖板2
‑3‑1‑3‑
3上端面,电机动力输出轴连接渐进凸轮刀2
‑3‑1‑3‑
5。
92.所述采摘室壳体2
‑3‑1‑3‑
2与滚珠套2
‑3‑1‑2‑
3通过螺钉连接,花丝采摘装置2
‑3‑1‑
3可随滚珠套2
‑3‑1‑2‑
3竖直运动。
93.所述花丝进口2
‑3‑1‑3‑
7上端设有切花砧2
‑3‑1‑3‑
8。
94.所述弧形对花罩2
‑3‑1‑3‑
1的下端直径为对花直径d1,对花直径d1为红花果球直径φ1的1.4~1.6倍,能够实现对准果球功能。
95.果球进入弧形对花罩2
‑3‑1‑3‑
1后,花丝进入花丝进口2
‑3‑1‑3‑
7,刀具电机2
‑3‑1‑3‑
4带动渐进凸轮刀2
‑3‑1‑3‑
5转动,切削花丝;切削后的花丝经与采摘室腔体2
‑3‑1‑3‑
6连接的花丝收集软管2
‑1‑
2进入花丝收集箱2
‑1‑
1,完成一次红花采摘。
96.如图11,图12,图13,图14,图15所示,根据权利要求1所述的花丝采摘装置2
‑3‑1‑
3,其特征是,所述渐进凸轮刀2
‑3‑1‑3‑
5的外围轮廓曲线为abc连线,外围轮廓曲线由a
‑
b曲线、b
‑
c曲线、c
‑
a直线组成;所述渐进凸轮刀2
‑3‑1‑3‑
5与刀具电机2
‑3‑1‑3‑
4动力输出轴连接处的圆心为凸轮刀轴心o1;g为abc连线上任一点,g
‑
o1直线的长度为凸轮刀径r,g
‑
o1直线
与o1‑
a直线的夹角为螺旋曲线角α。
97.所述a
‑
b曲线为一条在以凸轮刀轴心o1为极坐标原点,以o1‑
a直线为极轴的极坐标内的阿基米德螺旋曲线,其方程为r=e(α 90
°
),其中,e为螺旋常数;在a
‑
b曲线范围内,螺旋曲线角α的取值为0
°
~γ1,γ1为推拢面角,其范围为255
°
~275
°
;且当α=γ1时,g点与b点重合,凸轮刀径r达到最大值,为最大切刀径r3。
98.所述渐进凸轮刀2
‑3‑1‑3‑
5在a
‑
b曲线内的部分为花丝推拢面2
‑3‑1‑3‑5‑
1。
99.所述b
‑
c曲线为以凸轮刀轴心o1为圆心,以最大切刀径r3为半径的圆弧;在b
‑
c曲线内,螺旋曲线角α的取值范围为γ1~γ2,γ2为切削区角,其范围为300
°
~325
°
;且当α=γ2时,g点与c点重合。
100.所述渐进凸轮刀2
‑3‑1‑3‑
5在b
‑
c曲线内的部分为花丝切削刃2
‑3‑1‑3‑5‑
2。
101.所述渐进凸轮刀(2
‑3‑1‑3‑
5)在c
‑
a曲线内的部分为刀具回收区2
‑3‑1‑3‑5‑
3,凸轮刀径r减小,便于让出花丝进口(2
‑3‑1‑3‑
7)的空间,减小刀具对果球造成的二次损伤。
102.所述花丝进口2
‑3‑1‑3‑
7的外围轮廓曲线为两条圆弧曲线,分别为花丝进口曲线p1与切花砧内曲线p2,切花砧内曲线p2也是切花砧2
‑3‑1‑3‑
8的内圈曲线;所述切花砧内曲线p2为半径r3的圆弧,且与渐进凸轮刀2
‑3‑1‑3‑
5的b
‑
c曲线同心。
103.当渐进凸轮刀2
‑3‑1‑3‑
5绕刀具电机2
‑3‑1‑3‑
4动力输出轴转动时,花丝推拢面2
‑3‑1‑3‑5‑
1运动到花丝进口2
‑3‑1‑3‑
7上方,此时a
‑
b曲线与花丝进口曲线p1交于点g;随着渐进凸轮刀2
‑3‑1‑3‑
5转动,g点到切花砧内曲线p2的距离逐渐减小,花丝推拢面2
‑3‑1‑3‑5‑
1推动花丝向切花砧2
‑3‑2‑3‑
8运动并逐渐聚拢;当b
‑
c曲线与切花砧内曲线p2相交,即花丝切削刃2
‑3‑1‑3‑5‑
2位于花丝进口2
‑3‑1‑3‑
7上方时,花丝位于切削位置,切花砧2
‑3‑2‑3‑
8支撑花丝,花丝切削刃2
‑3‑1‑3‑5‑
2边缘刀刃与切花砧2
‑3‑2‑3‑
8内壁配合,形成对花丝的支撑切割,降低切削时对刀具的转速要求;切削完成后,渐进凸轮刀2
‑3‑1‑3‑
5继续转动,刀具回收区2
‑3‑1‑3‑5‑
3处于花丝进口2
‑3‑1‑3‑
7上方,让出花丝进口2
‑3‑1‑3‑
7空间,减小对果球的二次损伤。
104.所述花丝切削刃2
‑3‑1‑3‑5‑
2的宽度l2为果球缩颈直径φ2的1.0~1.2倍,能够完成对缩颈的全部切削;所述花丝切削刃2
‑3‑1‑3‑5‑
2的长度l3为果球缩颈直径φ2的3.0倍,实现在推拢后缩颈的切割。
105.如图16,图17所示,单株红花果球分布范围截面可近似为圆心为o3,外径r1,内径r2的半圆环,则红花成行种植时,红花果球分布范围可近似为半圆环延伸的柱体。
106.所述齿条安装架2
‑2‑
1的宽度为采收覆盖宽度l4,与红花分布圆环截面外径r1的关系为l4≥2r1。
107.所述末端执行器组2
‑
3中多个直线排布的采摘末端执行器单体2
‑3‑
1,按照中央格、两侧格、边缘格布置,根据不同格中果球分布范围深度不同,设置不同的竖直对准丝杠2
‑3‑1‑
2长度,分别为中央丝杠长度n1,两侧丝杠长度n2和边缘丝杠长度n3;每个格中,由果球分布范围最高点到每格采摘格中果球分布范围最低点的距离为分布深度,分别为中央分布深度m1,两侧分布深度m2和边缘分布深度m3,n1≥m1,n2≥m2,n3≥m3,实现红花植株的全域采收。
108.所述水平运动齿条2
‑3‑1‑1‑
1的长度为水平齿条长度l5;通过设置不同的水平齿条长度l5,每个末端执行器组2
‑
3可设置不同数量的采摘末端执行器单体2
‑3‑
1。
109.所述采收模块对行定位系统4
‑
2包括相机安装架4
‑2‑
1、单目相机4
‑2‑
2和双目相机4
‑2‑
3。
110.所述相机安装架4
‑2‑
1固接于花丝收集箱2
‑1‑
1前后两端;所述单目相机4
‑2‑
2和双目相机4
‑2‑
3通过卡槽安装于相机安装架4
‑2‑
1上,所述单目相机4
‑2‑
1安装于所述双目相机4
‑2‑
2上方。
111.单目相机4
‑2‑
1识别红花种植行后,图像传递至控制模块4
‑
3,控制模块4
‑
3驱动采收模块运动滑台1
‑2‑
2运动,使安装于滑台安装座1
‑2‑2‑
3上的全域红花采收模块2的中轴线对准红花种植行模型的中轴线,双目相机识别红花果球位置并定位果球的空间坐标。
112.如图18所示,所述辅助模块3包括电池组3
‑
1、太阳能电池板3
‑
2和辅助光源灯3
‑
3。
113.所述电池组3
‑
1包括主电池3
‑1‑
1和备用电池3
‑1‑
2。
114.所述主电池3
‑1‑
1安装在主机架1
‑
1的安装板上部,太阳能电池板3
‑
2可拆卸地安装于模块拓展架1
‑
2上端面,可在光照充足时为电池组3
‑
1充电,并可在光照过于强烈时降低全域红花采收模块2的覆盖区域的亮度,有利于单目相机4
‑2‑
2与双目相机4
‑2‑
3识别定位红花;所述辅助光源灯3
‑
3可拆卸地安装于主机架1
‑
1与模块拓展架1
‑
2下端面四角。
115.可在主机架1
‑
1的拓展架安装a轨1
‑4‑
1上加装拓展部件,如备用电池3
‑1‑
2或夜间照明灯具等,通过拓展架安装b轨1
‑4‑
2与固接于主机架1
‑
1和模块安装架1
‑
2上的拓展架安装a轨1
‑4‑
2的快速插接,实现多辅助设备的可选快速安装;辅助光源灯3
‑
3分布在主机架1
‑
1模块拓展架1
‑
2的下侧四角,并可自由旋转调节照明方向,辅助夜间与光线阴暗时的采收作业。
116.所述控制系统4,包括卫星定位系统4
‑
1、采收模块对行定位系统4
‑
2和控制模块4
‑
3。
117.所述卫星定位系统4
‑
1通过安装杆固接于主机架1
‑
1前部,采收模块对行定位系统4
‑
2固接于花丝收集箱2
‑1‑
1前后两端,控制模块4
‑
3固接于在主机架1
‑
1的安装板上部前端。
118.所述采收模块对行定位系统4
‑
2包括相机安装架4
‑2‑
1、单目相机4
‑2‑
2和双目相机4
‑2‑
3。
119.所述相机安装架4
‑2‑
1固接于花丝收集箱2
‑1‑
1前后两端;所述单目相机4
‑2‑
2和双目相机4
‑2‑
3通过卡槽安装于相机安装架4
‑2‑
1上,所述单目相机4
‑2‑
1安装于所述双目相机4
‑2‑
2上方。
120.如图19,图20所示,所述拓展架安装轨1
‑
4采用皮卡汀尼导轨式设计,可实现模块快速插接。
121.所述备用电池3
‑1‑
2安装于拓展架安装b轨1
‑4‑
2上端,可根据实际情况选装于主机架1
‑
1和模块拓展架1
‑
2固接的拓展架安装a轨1
‑4‑
1上。
122.如图21所示,所述调平伸缩杆1
‑
5通过螺栓固接于调平杆支撑架1
‑1‑
1和拓展架体1
‑2‑
1的安装吊耳上;所述调平伸缩杆1
‑
5长度可调,实现模块拓展架1
‑
2与主机架1
‑
1的拉紧固定与模块拓展架1
‑
2在竖直方向的角度可调。可根据地面坡度θ,调节调平伸缩杆1
‑
5,使调节后模块拓展架1
‑
2与主机架1
‑
1的夹角θ1与地面坡度θ相等;通过调节主机架1
‑
1下端的安装块和模块拓展架1
‑
2,可实现全域红花采收模块2与水平方向的倾角调节,使采摘末端执行器单体2
‑3‑
1竖直向下,对竖直向上生长的红花植株进行采收作业,适应地形坡度进
行采收。
123.弧形对花罩2
‑3‑1‑3‑
1下部直径为对花直径d1,为红花果球直径φ1的1.4~1.6倍;则以采摘段长度u为单位长度将红花种植行划分为多个采摘段,采摘段长度u与对花直径d1相等;通过设置不同的齿条长度l5,可改变每个末端执行器组2
‑
3内采摘末端执行器单体2
‑
2的数量,并在每个采摘段内以采摘格宽度v为单位宽度将采摘段划分为多个采摘格;采摘格宽度v与水平齿条长度l5相等,以此进行分格采收。
124.如图22所示,所述主机架1
‑
1两侧的全域红花采收模块2安装的单目相机4
‑2‑
2识别所在外侧红花种植行,并定位外侧红花种植行与中央红花种植行的行距q1、q2;所述滑台伺服电机1
‑2‑2‑
1驱动滑台丝杆1
‑2‑2‑
2运动,使全域红花采收模块2左右移动,调节两侧全域红花采收模块2与中央的全域红花采收模块2的间距l与q1、q2相同;并根据每个采收段内红花果球的数量决定是否对该采收段进行采收作业。
125.如图23所示,一种红花全域多模块智能采收机器人控制方法,包括如下步骤。
126.s1、操作控制模块4
‑
3,采收机器人进入初始状态;所述卫星定位系统4
‑
1定位机器人当前位置,并根据播种时的路径信息规划采收路径,在行走轮组1
‑
3的带动下运动到起始位置;所述主机架前部的单目相机4
‑2‑
2定位红花种植行,使主机架1
‑
1安装的全域红花采收模块2对准中央红花种植行;所述主机架1
‑
1两侧的全域红花采收模块2安装的单目相机4
‑2‑
2识别所在外侧红花种植行,并定位外侧红花种植行与中央红花种植行的行距q1、q2;所述滑台伺服电机1
‑2‑2‑
1驱动滑台丝杆1
‑2‑2‑
2运动,使全域红花采收模块2左右移动,调节两侧全域红花采收模块2与中央的全域红花采收模块2的间距l与q1、q2相同。
127.s2、采收机器人对准红花种植行后进入区域划分状态;控制系统4在红花种植行方向,以采摘段长度u为单位长度将红花种植行划分为若干个采摘段,采摘段长度u与对花直径d1相等,并在每个采摘段内以采摘格宽度v为单位宽度将采摘段划分为5个采摘格;所述采摘格宽度v与水平齿条长度l5相等。
128.s3、区域划分完成后,采收机器人进入目标识别状态;各个全域红花采收模块2安装的双目相机4
‑2‑
3识别前方一个采摘段内的红花果球数量;识别结果包括如下三种条件:条件一:前方未识别到红花种植行;当满足条件一时,采收机器人重新进入初始状态,进行对行动作;条件二:前方一个采摘段内果球数量少于2个;当满足条件二时,标记该采摘段为o采摘段,采收机器人保持目标识别状态并前进一个采摘段长度u,继续识别下一个采摘段;条件三:当前方一个采摘段内果球数量为2个或以上时;当满足条件三时,标记该采摘段为i采摘段;采收机器人定位i采摘段内果球位置,以双目相机4
‑2‑
3安装位置为定位原点o2,平行于水平运动齿条2
‑3‑1‑1‑
1方向为y轴,竖直方向为z轴确定各个红花果球坐标;所述行走轮组1
‑
3移动,采收机器人前进,i采摘段进入工作范围。
129.s4、i采摘段进入工作范围后,将i采摘段标记为i工作段;根据果球的y轴坐标,每个采摘格对应的采摘末端执行器单体2
‑3‑
1在水平对准装置2
‑3‑1‑
1的带动下,沿水平运动齿条2
‑3‑1‑1‑
1运动到果球上方,并根据果球的z轴坐标,竖直对准丝杠2
‑3‑1‑
2带动花丝采摘装置2
‑3‑1‑
3向下运动到采收位置,使果球进入弧形对花罩2
‑3‑1‑3‑
1,花丝通过花丝进
口2
‑3‑1‑3‑
7,位于采摘室腔体2
‑3‑1‑3‑
6;所述刀具电机2
‑3‑1‑3‑
4启动,带动渐进凸轮刀2
‑3‑1‑3‑
5转动,完成花丝切削;切削后的花丝在负压作用下经花丝收集软管2
‑1‑
2进入花丝收集箱2
‑1‑
1,完成一次红花采摘;花丝采摘完成后,所述花丝采摘装置2
‑3‑1‑
3向上提升,准备采收所在采摘格内其他红花,直至该i工作段内红花全部采收完成。
130.s5、当采收机器人进入采收状态时,同步地进入目标识别状态,并等待采收状态结束后执行下一步动作。
131.上述实施例仅用于说明本发明,其中各部件的结构、连接方式等都是可以有所变化,凡是在本发明技术方案的基础上进行的等同变换和改进,均不应排除在本发明的保护范围之外。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。