1.本发明涉及变压器技术领域,尤其涉及一种节能型抗短路冲击的海上风电变压器。
背景技术:
2.海上平台是高出海面且具有水平台面的一种桁架构筑物,供进行生产作业或其他活动用,按其位置是否固定,分为固定式海上平台和浮式海上平台,不论是哪种海上平台,在海上均会受到风暴海浪等的影响而产生冲击,导致变压器在工作时,无法维持变压器的平衡,进而导致海上风电变压器短路的事故总有发生。
技术实现要素:
3.为此,本发明提供一种节能型抗短路冲击的海上风电变压器,用以克服现有技术中变压器在工作时,无法维持变压器的平衡的问题。
4.为实现上述目的,本发明提供一种节能型抗短路冲击的海上风电变压器,包括:壳体,其内部包括由底壁和侧壁形成的空腔,用以容纳变压器主体,其中,壳体侧壁设置有用以检测风速的风速传感器,风速传感器将测得的数据发送至控制单元;减震机构,其设置在壳体的底部,包括设置在壳体内部的承载台和与承载台连接的减震装置,用以维持变压器的平衡;所述承载台中设置有位置传感器和重量传感器,位置传感器用以检测所述承载台两端的高度,并将检测结果发送至控制单元,重量传感器用以检测所述变压器重量,并将检测结果发送至控制单元;所述控制单元,其分别与所述减震机构和所述风速传感器连接,用以接收所述位置传感器、所述风速传感器和所述重量传感器测得的数据,并根据所述承载台高度计算变压器平衡度,所述控制单元根据变压器平衡度与预设值进行比对并根据对结果判定变压器平衡度是否符合标准,并在变压器平衡度不符合标准时,根据实际变压器平衡度修正所述减震装置的运行参数。
5.进一步地,当所述变压器工作时,所述控制单元获取所述位置传感器获取的所述承载台的高度以计算实际变压器平衡度a,设定a=|h1
‑
h2|,计算完成时,所述控制单元将实际变压器平衡度a与预设变压器平衡度a0进行比对,并根据比对结果判定变压器平衡度是否符合标准,其中,h1为承载台一端的高度,h2为承载台另一端的高度;所述控制单元中预设变压器平衡度a0包括第一预设变压器平衡度a1和第二预设变压器平衡度a2,其中,a1<a2;当a<a1时,所述控制单元判定变压器平衡度符合标准,并无需调节所述减震装置的运行参数;当a1≤a≤a2时,所述控制单元判定需结合风速二次判定变压器平衡度是否符合标准;当a>a2时,所述控制单元判定变压器平衡度不符合标准,并需调节所述减震装置
的运行参数。
6.进一步地,当所述控制单元判定需调节所述减震装置的运行参数时,所述控制单元计算变压器平衡度差值
△
a,并根据变压器平衡度差值
△
a修正所述减震装置的支撑角度,直至变压器平衡度符合标准,设定
△
a=a
‑
a2,所述控制单元将修正后的所述减震装置的支撑角度记为θ,设定θ=θ0
×
(1
‑
(
△
a/a2)),其中,θ0为预设减震装置支撑角度;当h1>h2时,所述控制单元修正所述承载台高度为h1侧对应的减震装置伸缩杆的伸出长度,并该减震装置伸缩杆的伸出长度增加至对应值,以使变压器平衡度符合标准;当h1<h2时,所述控制单元修正所述承载台高度为h2侧对应的减震装置伸缩杆的伸出长度,并该减震装置伸缩杆的伸出长度增加至对应值,以使变压器平衡度符合标准。
7.进一步地,所述控制单元中还设置有支撑角度最小值θmin,当所述控制单元需将所述减震装置角度修正至θ时,所述控制单元将修正后的支撑角度θ与支撑角度最小值θmin进行比对,当θ<θmin时,所述控制单元判定无法通过仅修正单侧减震装置的支撑角度,并将对应的减震装置支撑角度调节至θmin,当θ≥θmin时,所述控制单元判定减震装置支撑角度符合标准。
8.进一步地,当所述控制单元判定无法通过仅修正单侧减震装置的支撑角度时,所述控制计算支撑角度差值
△
θ、将支撑角度差值
△
θ与预设支撑角度差值进行比对,并根据比对结果选取对应的伸缩杆调节量,以调节相对侧减震装置伸缩杆的伸出长度至对应值,直至变压器平衡度符合标准;所述预设支撑角度差值包括第一预设支撑角度差值
△
θ1、第二预设支撑角度差值
△
θ2和第三预设支撑角度差值
△
θ,所述伸缩杆调节量包括第一伸缩杆调节量w1、第二伸缩杆调节量w2、第三伸缩杆调节量w3和第四伸缩杆调节量w4;当
△
θ<
△
θ1时,所述控制单元选取第一伸缩杆调节量w1将减少相对侧伸缩杆的伸出长度至对应值;当
△
θ1≤
△
θ<
△
θ2时,所述控制单元选取第二伸缩杆调节量w2将减少相对侧伸缩杆的伸出长度至对应值;当
△
θ2≤
△
θ<
△
θ3时,所述控制单元选取第三伸缩杆调节量w3将减少相对侧伸缩杆的伸出长度至对应值;当
△
θ≥
△
θ3时,所述控制单元选取第四伸缩杆调节量w4将减少相对侧伸缩杆的伸出长度至对应值;当所述控制单元选取第i伸缩杆调节量减少相对侧伸缩杆的伸出长度至对应值时,i=1,2,3,4,所述控制单元将减少后相对侧伸缩杆的伸出长度记为wa,设定wa=w0
‑
wi。
9.进一步地,所述控制单元中还设置有伸缩杆伸出长度最小值wmin,当所述控制单元判定需将相对侧伸缩杆的伸出长度减少至wa时,所述控制单元将wa与伸缩杆伸出长度最小值wmin进行比对,当wa≥wmin时,所述控制单元判定将相对侧伸缩杆的伸出长度符合标准,当wa<wmin时,所述控制单元判定所述减震装置无法维持所述变压器平衡,并发送变压器平衡度预警信号。
10.进一步地,当所述控制单元定需结合风速二次判定变压器平衡度是否符合标准时,所述控制单元获取所述风速传感器测得的风速v、将风速v与预设风速v0进行比对,并根据比对结果二次判定变压器平衡度是否符合标准;
当v≥v0时,所述控制单元判定变压器平衡度符合标准;当v<v0时,所述控制单元判定变压器平衡度不符合标准。
11.进一步地,所述控制单元控制所述减震装置工作时,所述控制单元获取所述重量传感器测得的变压器重量e、将变压器重量e与预设变压器重量e0进行比对,并根据比对结果修正所述预设支撑角度θ0,所述控制单元将修正后的预设支撑角度记为θ0’,设定θ0’=θ0
×
(e/e0)。
12.进一步地,所述减震装置包括液压缸和连接杆,其中,液压缸的一端与所述壳体的侧壁连接,另一端连接有伸缩杆;连接杆的一端与所述承载台铰接,另一端与所述伸缩杆铰接。
13.进一步地,所述壳体侧壁上设置有辅助机构,包括用以维持变压器平衡的辅助装置和调节辅助装置位置的调节装置;其中,辅助装置包括第一安装板和第二安装板,第一连接板和第二连接板之间设置有弹簧;调节装置包括与第二安装板连接的螺杆和与螺杆连接的调节把手,其中,螺杆穿过通孔与所述第二安装板连接。
14.与现有技术相比,本发明的有益效果在于,本发明中通过设置减震机构和辅助机构对变压器进行减震,以维持变压器的平衡,以避免变压器自身工作和外界因素对变压器平衡的影响,同时,本发明实施例中还设置有控制单元,通过控制单元实时获取位置传感器检测的数据,以精准的掌握变压器的平衡度,通过控制单元实时掌握变压器的平衡度,其一方面,可以实时掌握变压器的平衡状态,以使变压器可以在处于稳定的状态下运行,可以增加变压器的使用寿命,另一方面,通过控制单元调节减震结构的运行参数,可以有效的吸收对变压器的冲击,在有效的增加了变压器的抗冲击性能的同时,可以有效的避免短路与事故的发生,进而有效的增加了变压器的安全性。
15.进一步地,本发明控制单元中预设有变压器平衡度标准,在变压器工作时,控制单元实时获取设置在承载台内位置传感器测得的数据,并根据位置传感器测得的数据,其一方面,可以实时的掌握变压器的工作环境,当变压器平衡度不符合标准时,通过控制单元调节减震装置的参数,以使变压器在符合标准的环境下进行工作,其另一方面,通过位置传感器检测的数据,可以更加精确地调节减震装置的运行参数,在有效的增加了变压器的抗冲击性能的同时,可以有效的避免短路与事故的发生,进而有效的增加了变压器的安全性。
16.进一步地,本发明中控制单元判定变压器平衡度不符合标准时,通过计算变压器平衡度差值,并通过平衡差值对减震装置的伸缩杆长度进行调节,以改变减震装置的支撑角度θ,进而调节承载台的高度,以使变压器平衡度符合标准,通过调节减震装置的伸出长度以改变减震装置的支撑角度θ,其一方面,通过改变减震装置伸缩杆的伸出长度维持变压器的平衡,其另一方面,在有效的增加了变压器的抗冲击性能的同时,可以有效的避免短路与事故的发生,进而有效的增加了变压器的安全性。
17.进一步地,本发明控制单元中还设置有减震装置支撑角度最小值,在对变压器进行减震时,通过控制单元实时将修正后的减震装置支撑角度与减震装置支撑角度最小值进行比对,通过控制装置的实时比对,其一方面,可以使减震装置在符合标准的状态工作,另一方面,通过控制单元调节减震装置的运行参数,在有效的增加了变压器的抗冲击性能的同时,可以有效的避免短路与事故的发生,进而有效的增加了变压器的安全性。
18.进一步地,本发明控制单元中预设有多个支撑角度差值,当控制单元判定无法进
通过调节单侧减震装置的支撑角度以维持变压器平衡时,通过调节相对侧减震装置伸缩杆的伸出长度以维持变压器平衡,通过控制单元使用两个减震装置以维持变压器的平衡度,可以使减震装置在符合标准的状态工作,进而在有效的增加了变压器的抗冲击性能的同时,可以有效的避免短路与事故的发生,进而有效的增加了变压器的安全性。
19.进一步地,本发明控制单元中还设置有减震装置伸缩杆伸出长度最小值,在对变压器进行减震时,通过控制单元实时将修正后的减震装置伸缩杆伸出长度与减震装置伸缩杆伸出长度最小值进行比对,通过控制装置的实时比对,其一方面,可以使减震装置在符合标准的状态工作,另一方面,通过控制单元调节减震装置的运行参数,在有效的增加了变压器的抗冲击性能的同时,可以有效的避免短路与事故的发生,进而有效的增加了变压器的安全性。
20.进一步地,本发明控制单元中还设置有预设风速,通过壳体侧壁外侧的风速传感器实时获取变压器所在位置的风速,可以实时掌握变压器所在位置的外部环境,并通过控制单元将实际风速与预设风速的比对,可以更加精准的掌握变压器的平衡情况,进而在有效的增加了变压器的抗冲击性能的同时,可以有效的避免短路与事故的发生,进而有效的增加了变压器的安全性。
21.进一步地,本发明中预设变压器重量,通过控制单元实时获取所述重量传感器以修正预设支撑角度,可以使控制单元使控制单元对不同重量的变压器的平衡度,进行更加精准的把握,进而,可以使减震装置更加合理的进行调节,再者,通过控制单元调节减震结构的运行参数,可以有效的吸收对变压器的冲击,在有效的增加了变压器的抗冲击性能的同时,可以有效的避免短路与事故的发生,进而有效的增加了变压器的安全性。
附图说明
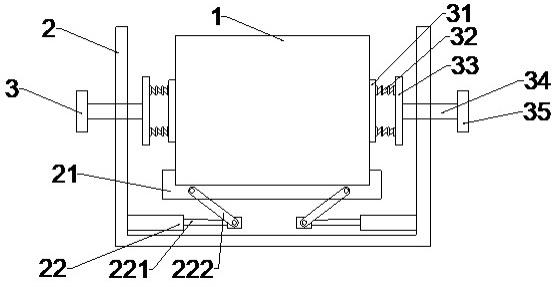
22.图1为本发明所述节能型抗短路冲击的海上风电变压器的结构示意图。
23.附图标记:1
‑
变压器主体,2
‑
壳体,3
‑
辅助机构,21
‑
承载台,22
‑
液压缸,221
‑
伸缩杆,222
‑
支撑杆,31
‑
第一安装板,32
‑
弹簧,33
‑
第二安装板,34
‑
螺杆,35
‑
调节把手。
具体实施方式
24.为了使本发明的目的和优点更加清楚明白,下面结合实施例对本发明作进一步描述;应当理解,此处所描述的具体实施例仅仅用于解释本发明,并不用于限定本发明。
25.下面参照附图来描述本发明的优选实施方式。本领域技术人员应当理解的是,这些实施方式仅仅用于解释本发明的技术原理,并非在限制本发明的保护范围。
26.需要说明的是,在本发明的描述中,术语“上”、“下”、“左”、“右”、“内”、“外”等指示的方向或位置关系的术语是基于附图所示的方向或位置关系,这仅仅是为了便于描述,而不是指示或暗示所述装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
27.此外,还需要说明的是,在本发明的描述中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域技术人员而言,可根据具体情况理解上述术语在
本发明中的具体含义。
28.请参阅图1所示,为本发明实施例提供的所述节能型抗短路冲击的海上风电变压器的结构示意图,包括:壳体2,其内部包括由底壁和侧壁形成的空腔,用以容纳变压器主体1,其中,壳体侧壁上设置有带螺纹的通孔和用以检测风速的风速传感器,风速传感器将测得的数据发送至控制单元。
29.减震机构,其设置在壳体2的底部,包括设置在壳体2内部的承载台21和与承载台21连接的减震装置,用以维持变压器1的平衡;所述承载台21中设置有位置传感器和重量传感器,位置传感器分别设置在承载台两端用以检测所述承载台21两端的高度,并将检测结果发送至控制单元,重量传感器用以检测所述变压器重量,并将检测结果发送至控制单元。
30.辅助机构3,其包括用以维持变压器平衡的辅助装置和调节辅助装置位置的调节装置;其中,辅助装置包括第一安装板31和通过弹簧32与第一安装板31连接的第二安装板33;调节装置包括与第二安装板33连接的螺杆34和与螺杆34连接的调节把手,其中,螺杆34通过通孔34与所述第二安装板连接;在工作时,通过旋转调节把手35调节所述辅助装置的位置,并在所述第一安装板31与变压器1侧壁接触时,停止旋转调节把手。本领域技术人员可以理解的是,本发明中对减震装置的数量不作限制,只需能实现减震效果即可,本实施例,辅助装置的数量优选的设置为两个,且相对的设置在壳体侧壁的两侧。
31.控制单元(图中未画出),其分别与所述减震机构和所述风速传感器连接,用以接收所述位置传感器、所述风速传感器和所述重量传感器测得的数据以调节所述减震机构的运行参数。
32.请继续参阅图1所示,本实施例中,所述减震装置包括液压缸21和连接杆222,其中,液压缸22设置在靠近壳体2的底壁的方向,液压缸22的一端与所述壳体2的侧壁连接,另一端连接有伸缩杆221;连接杆222的一端与所述承载台铰接,另一端与所述伸缩杆221铰接;在减震装置工作时,控制单元控制液压缸驱动伸缩杆伸缩,伸缩杆驱动所述连接杆转动,以改变所述连接杆与所述伸缩杆之间的支撑角度θ,进而维持变压器的平衡,其中,θ的角度范围为33
°‑
90
°
。本领域技术人员可以理解的是,本发明中对减震装置的数量不作限制,只需能实现减震效果即可,本实施例,减震装置的数量优选的设置为两个,且相对的设置在壳体内部的两侧。
33.具体而言,本发明实施例中通过设置减震机构和辅助机构对变压器进行减震,以维持变压器的平衡,以避免变压器自身工作和外界因素对变压器平衡的影响,同时,本发明实施例中还设置有控制单元,通过控制单元实时获取位置传感器检测的数据,以精准的掌握变压器的平衡度,通过控制单元实时掌握变压器的平衡度,其一方面,可以实时掌握变压器的平衡状态,以使变压器可以在处于稳定的状态下运行,可以增加变压器的使用寿命,另一方面,通过控制单元调节减震结构的运行参数,可以有效的吸收对变压器的冲击,在有效的增加了变压器的抗冲击性能的同时,可以有效的避免短路与事故的发生,进而有效的增加了变压器的安全性。
34.具体而言,当所述变压器工作时,所述控制单元获取所述位置传感器获取的所述承载台的高度以计算实际变压器平衡度a,设定a=|h1
‑
h2|,计算完成时,所述控制单元将实际变压器平衡度a与预设变压器平衡度a0进行比对,并根据比对结果判定变压器平衡度是
否符合标准,其中,h1为承载台一端的高度,h2为承载台另一端的高度;所述控制单元中预设变压器平衡度a0包括第一预设变压器平衡度a1和第二预设变压器平衡度a2,其中,a1<a2;当a<a1时,所述控制单元判定变压器平衡度符合标准,并无需调节所述减震装置的运行参数;当a1≤a≤a2时,所述控制单元判定需结合风速二次判定变压器平衡度是否符合标准;当a>a2时,所述控制单元判定变压器平衡度不符合标准,并需调节所述减震装置的运行参数。
35.具体而言,本发明实施例控制单元中预设有变压器平衡度标准,在变压器工作时,控制单元实时获取设置在承载台内位置传感器测得的数据,并根据位置传感器测得的数据,其一方面,可以实时的掌握变压器的工作环境,当变压器平衡度不符合标准时,通过控制单元调节减震装置的参数,以使变压器在符合标准的环境下进行工作,其另一方面,通过位置传感器检测的数据,可以更加精确地调节减震装置的运行参数,在有效的增加了变压器的抗冲击性能的同时,可以有效的避免短路与事故的发生,进而有效的增加了变压器的安全性。
36.具体而言,当所述控制单元判定需调节所述减震装置的运行参数时,所述控制单元计算变压器平衡度差值
△
a,并根据变压器平衡度差值
△
a修正所述减震装置的支撑角度,直至变压器平衡度符合标准,设定
△
a=a
‑
a2,所述控制单元将修正后的所述减震装置的支撑角度记为θ,设定θ=θ0
×
(1
‑
(
△
a/a2)),其中,θ0为预设减震装置支撑角度;当h1>h2时,所述控制单元修正所述承载台高度为h1侧对应的减震装置伸缩杆的伸出长度,并该减震装置伸缩杆的伸出长度增加至对应值,以使变压器平衡度符合标准;当h1<h2时,所述控制单元修正所述承载台高度为h2侧对应的减震装置伸缩杆的伸出长度,并该减震装置伸缩杆的伸出长度增加至对应值,以使变压器平衡度符合标准。
37.具体而言,本发明实施例中控制单元判定变压器平衡度不符合标准时,通过计算变压器平衡度差值,并通过平衡差值对减震装置的伸缩杆长度进行调节,以改变减震装置的支撑角度θ,进而调节承载台的高度,以使变压器平衡度符合标准,通过调节减震装置的伸出长度以改变减震装置的支撑角度θ,其一方面,通过改变减震装置伸缩杆的伸出长度维持变压器的平衡,其另一方面,在有效的增加了变压器的抗冲击性能的同时,可以有效的避免短路与事故的发生,进而有效的增加了变压器的安全性。
38.具体而言,所述控制单元中还设置有支撑角度最小值θmin,当所述控制单元需将所述减震装置角度修正至θ时,所述控制单元将修正后的支撑角度θ与支撑角度最小值θmin进行比对,当θ<θmin时,所述控制单元判定无法通过仅修正单侧减震装置的支撑角度,并将对应的减震装置支撑角度调节至θmin,当θ≥θmin时,所述控制单元判定减震装置支撑角度符合标准。
39.具体而言,本发明实施例控制单元中还设置有减震装置支撑角度最小值,在对变压器进行减震时,通过控制单元实时将修正后的减震装置支撑角度与减震装置支撑角度最小值进行比对,通过控制装置的实时比对,其一方面,可以使减震装置在符合标准的状态工作,另一方面,通过控制单元调节减震装置的运行参数,在有效的增加了变压器的抗冲击性
能的同时,可以有效的避免短路与事故的发生,进而有效的增加了变压器的安全性。
40.具体而言,当所述控制单元判定无法通过仅修正单侧减震装置的支撑角度时,所述控制计算支撑角度差值
△
θ、将支撑角度差值
△
θ与预设支撑角度差值进行比对,并根据比对结果选取对应的伸缩杆调节量,以调节相对侧减震装置伸缩杆的伸出长度至对应值,直至变压器平衡度符合标准;所述预设支撑角度差值包括第一预设支撑角度差值
△
θ1、第二预设支撑角度差值
△
θ2和第三预设支撑角度差值
△
θ,所述伸缩杆调节量包括第一伸缩杆调节量w1、第二伸缩杆调节量w2、第三伸缩杆调节量w3和第四伸缩杆调节量w4;当
△
θ<
△
θ1时,所述控制单元选取第一伸缩杆调节量w1将减少相对侧伸缩杆的伸出长度至对应值;当
△
θ1≤
△
θ<
△
θ2时,所述控制单元选取第二伸缩杆调节量w2将减少相对侧伸缩杆的伸出长度至对应值;当
△
θ2≤
△
θ<
△
θ3时,所述控制单元选取第三伸缩杆调节量w3将减少相对侧伸缩杆的伸出长度至对应值;当
△
θ≥
△
θ3时,所述控制单元选取第四伸缩杆调节量w4将减少相对侧伸缩杆的伸出长度至对应值;当所述控制单元选取第i伸缩杆调节量减少相对侧伸缩杆的伸出长度至对应值时,i=1,2,3,4,所述控制单元将减少后相对侧伸缩杆的伸出长度记为wa,设定wa=w0
‑
wi。
41.具体而言,本发明实施例控制单元中预设有多个支撑角度差值,当控制单元判定无法进通过调节单侧减震装置的支撑角度以维持变压器平衡时,通过调节相对侧减震装置伸缩杆的伸出长度以维持变压器平衡,通过控制单元使用两个减震装置以维持变压器的平衡度,可以使减震装置在符合标准的状态工作,进而在有效的增加了变压器的抗冲击性能的同时,可以有效的避免短路与事故的发生,进而有效的增加了变压器的安全性。
42.具体而言,所述控制单元中还设置有伸缩杆伸出长度最小值wmin,当所述控制单元判定需将相对侧伸缩杆的伸出长度减少至wa时,所述控制单元将wa与伸缩杆伸出长度最小值wmin进行比对,当wa≥wmin时,所述控制单元判定将相对侧伸缩杆的伸出长度符合标准,当wa<wmin时,所述控制单元判定所述减震装置无法维持所述变压器平衡,并发送变压器平衡度预警信号。
43.具体而言,本发明实施例控制单元中还设置有减震装置伸缩杆伸出长度最小值,在对变压器进行减震时,通过控制单元实时将修正后的减震装置伸缩杆伸出长度与减震装置伸缩杆伸出长度最小值进行比对,通过控制装置的实时比对,其一方面,可以使减震装置在符合标准的状态工作,另一方面,通过控制单元调节减震装置的运行参数,在有效的增加了变压器的抗冲击性能的同时,可以有效的避免短路与事故的发生,进而有效的增加了变压器的安全性。
44.具体而言,当所述控制单元定需结合风速二次判定变压器平衡度是否符合标准时,所述控制单元获取所述风速传感器测得的风速v、将风速v与预设风速v0进行比对,并根据比对结果二次判定变压器平衡度是否符合标准;当v≥v0时,所述控制单元判定变压器平衡度符合标准;当v<v0时,所述控制单元判定变压器平衡度不符合标准。
45.具体而言,本发明实施例控制单元中还设置有预设风速,通过壳体侧壁外侧的风速传感器实时获取变压器所在位置的风速,可以实时掌握变压器所在位置的外部环境,并通过控制单元将实际风速与预设风速的比对,可以更加精准的掌握变压器的平衡情况,进而在有效的增加了变压器的抗冲击性能的同时,可以有效的避免短路与事故的发生,进而有效的增加了变压器的安全性。
46.具体而言,所述控制单元控制所述减震装置工作时,所述控制单元获取所述重量传感器测得的变压器重量e、将变压器重量e与预设变压器重量e0进行比对,并根据比对结果修正所述预设支撑角度θ0,所述控制单元将修正后的预设支撑角度记为θ0’,设定θ0’=θ0
×
(e/e0)。
47.具体而言,本发明实施例中预设变压器重量,通过控制单元实时获取所述重量传感器以修正预设支撑角度,可以使控制单元使控制单元对不同重量的变压器的平衡度,进行更加精准的把握,进而,可以使减震装置更加合理的进行调节,再者,通过控制单元调节减震结构的运行参数,可以有效的吸收对变压器的冲击,在有效的增加了变压器的抗冲击性能的同时,可以有效的避免短路与事故的发生,进而有效的增加了变压器的安全性。
48.至此,已经结合附图所示的优选实施方式描述了本发明的技术方案,但是,本领域技术人员容易理解的是,本发明的保护范围显然不局限于这些具体实施方式。在不偏离本发明的原理的前提下,本领域技术人员可以对相关技术特征做出等同的更改或替换,这些更改或替换之后的技术方案都将落入本发明的保护范围之内。
49.以上所述仅为本发明的优选实施例,并不用于限制本发明;对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。