1.本技术涉及焊接设备技术领域,特别涉及一种激光焊接压头及激光焊接机。
背景技术:
2.现有的电池模组的电芯与电芯之间、模组与模组之间通过导体连接,用于实现电池的串并联的导体零件称为汇流排,在电池模组生产中,汇流排通过焊接的方式连接于电芯极柱,现有的焊接方式是直接将汇流排与极柱压紧焊接进行焊接,但是现有焊接设备不能保证汇流排的压紧力,导致汇流排与极柱焊接精度低,焊接不到位,焊接精度难以把控,焊接质量和焊接速度无法进一步提高。
技术实现要素:
3.为了解决上述技术问题之一,本技术提供一种激光焊接压头及激光焊接机,包括安装架、压头组件、以及设置于所述安装架上且用于驱动压头组件压紧产品的位移组件;所述压头组件与所述位移组件弹性连接,所述位移组件上装设有接触于所述压头组件的检测组件,所述检测组件用于检测所述压头组件的压紧力和压紧位置。通过检测组件精确控制压头组件的压紧力,确保汇流排与极柱紧密接触,保证焊接质量,同时,在压紧汇流排的过程中,检测组件可以通过检测的压头组件位置,实现对汇流排的距离位置进行测量,进而能够较好地控制激光的焦距来控制激光焊接,提高焊接控制精度。
4.优选的,所述检测组件包括设置于所述位移组件的位移检测器、以及设置于所述位移组件和所述压头组件之间的压力检测器,所述位移检测器上装设有抵触于所述压头组件的接触件。通过压力检测器实现检测压头组件的压紧力,从而确保汇流排与极柱紧密接触,保证焊接质量通过位移检测器可以在压紧汇流排的过程中得到汇流排的距离位置,进而能够更准确地控制激光焊接头的激光焦距,实现提高焊接控制精度。
5.优选的,所述位移组件包括固定于所述安装架上的驱动组件、以及安装于所述驱动组件移动端的连接板,所述检测组件固定于所述连接板上。通过驱动组件驱动连接升降进而带动压头组件移动,实现驱动压头组件压紧汇流排的目的。
6.优选的,所述压头组件包括安装板以及设置于所述安装板上的焊接压头,所述安装板上安装有用于连接所述位移组件的弹性组件,所述安装板固定有供所述接触件接触的测量板。在焊接压头压紧汇流排过程中,位移检测器的接触件接触于测量板并压缩,通过接触件位移值精准地获取焊接压头的位置进而进行汇流排的距离测量,实现便于控制激光焦距移动距离。
7.优选的,所述弹性组件包括穿置于所述安装板和位移组件的限位导柱、以及套设于所述导柱外周的弹性件;所述弹性件的两端分别作用于所述安装板和位移组件。弹性件位于安装板和连接板之间,进而弹性件的两端分别作用于安装板和连接板。
8.优选的,所述连接板上安装有用于固定所述位移检测器且呈l形的固定块。位移检测器安装在固定块上,且接触件于连接板的侧方延伸至安装板的测量板上,实现位移检测
器的接触件接触于测量板。
9.优选的,所述安装板上安装有连通所述焊接压头的除尘箱体,所述除尘箱体侧面连接有除尘管道。通过除尘管道吹气实现除尘的功能,保证焊接质量。
10.优选的,所述除尘箱体顶面开设有供激光穿入的入光口,所述焊接压头呈锥形状且其底端形成有连通所述入光口的出光口。焊接压头的底端压紧于汇流排,焊接激光通过除尘箱体的入光口穿入焊接压头,并从焊接压头底端的出光口射出,进而完成焊接工序。
11.优选的,位于所述焊接压头的侧方设有吹气嘴。通过吹气嘴吹气实现在焊接过程中对汇流排的焊接位置进行焊渣清除,进一步提高焊接质量。
12.本技术另一方面还提供一种激光焊接机,包括上述激光焊接压头、以及用于焊接产品的激光焊接头,所述激光焊接头上装设有用于检测所述激光焊接头与产品距离的光学检测组件。同时在激光焊接机上还设置有激光位移传感器,通过设置激光位移传感器也可获取汇流排离激光焊接头的距离,进而实现降低容错率,保证焊接效率和质量。
13.与现有技术相比,本技术的有益效果是:本技术的方案通过在安装架上设置有位移组件,在位移组件上弹性连接有压头组件,位移组件用于驱动压头组件压紧汇流排,使得汇流排与极柱紧密接触,在位移组件上装设有接触于压头组件的检测组件,压头组件压紧汇流排使得汇流排与极柱接触时,通过位移组件上的检测组件精确控制压头组件的压紧力,确保汇流排与极柱紧密接触,保证焊接质量。同时,在压紧汇流排的过程中,检测组件可以通过检测的压头组件位置,实现对汇流排的距离位置进行测量,进而能够更准确地控制激光的焦距来进行激光焊接,提高焊接控制精度。
附图说明
14.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对本技术实施例或现有技术的描述中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是本技术的一部分实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
15.图1为本技术实施例激光焊接压头及激光焊接机的结构示意图;
16.图2为本技术实施例图1的a部局部放大图;
17.图3为本技术实施例激光焊接压头及激光焊接机的立体图;
18.图4为本技术实施例焊接压头结构示意图。
19.附图标记
20.10、安装架;20、位移组件;21、驱动组件;22、连接板;23、固定块;30、检测组件;31、位移检测器;311、接触件;32、压力检测器;40、压头组件;41、焊接压头;411、气孔;412、出光口;42、安装板;43、弹性组件;431、限位导柱;432、弹性件;44、测量板;45、除尘箱体;451、入光口;46、除尘管道;47、吹气嘴。
具体实施方式
21.以下将以图式揭露本技术的多个实施方式,为明确说明起见,许多实务上的细节将在以下叙述中一并说明。然而,应了解到,这些实务上的细节不应用以限制本技术。也就是说,在本技术的部分实施方式中,这些实务上的细节是非必要的。此外,为简化图式起见,
一些习知惯用的结构与组件在图式中将以简单的示意的方式绘示之。
22.需要说明,本技术实施例中所有方向性指示诸如上、下、左、右、前、后
……
仅用于解释在某一特定姿态如附图所示下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
23.另外,在本技术中如涉及“第一”、“第二”等的描述仅用于描述目的,并非特别指称次序或顺位的意思,亦非用以限定本技术,其仅仅是为了区别以相同技术用语描述的组件或操作而已,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本技术要求的保护范围之内。
24.为能进一步了解本技术的实用新型内容、特点及功效,兹例举以下实施例,并配合附图详细说明如下:
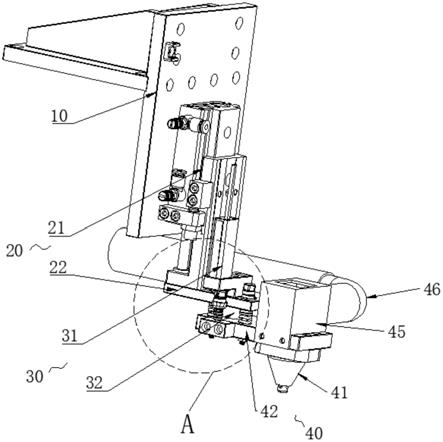
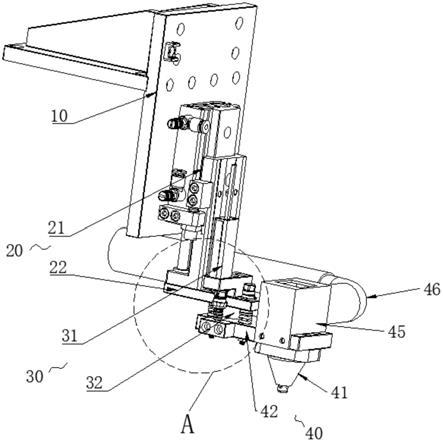
25.为了解决上述技术问题,本实施例提供一种激光焊接压头,如图1
‑
2所示,包括安装架10,在安装架10上设置有位移组件20,在位移组件20弹性连接有压头组件40,位移组件20用于驱动压头组件40压紧汇流排,使得汇流排与极柱紧密接触,在位移组件20上装设有接触于压头组件40的检测组件30,压头组件40压紧汇流排使得汇流排与极柱接触时,通过位移组件20上的检测组件30精确控制压头组件40的压紧力,确保汇流排与极柱紧密接触,保证焊接质量,同时,在压紧汇流排的过程中,检测组件30可以通过检测的压头组件40位置,实现对汇流排的距离位置进行测量,进而能够较好地控制激光的焦距来控制激光焊接,提高焊接控制精度。
26.具体的,检测组件30包括设置于位移组件20的位移检测器31、以及设置于所述位移组件20和压头组件40之间的压力检测器32,位移组件20驱动压头组件40压紧汇流排时,通过压力检测器32实现检测压头组件40的压紧力,从而确保汇流排与极柱紧密接触,保证焊接质量。位移检测器31上装设有抵触于压头组件40的接触件311,在压头组件40压紧汇流排时,接触件311接触于压头组件40,进而位移检测器31检测压头组件40的下压位置,通过位移检测器31可以在压紧汇流排的过程中得到汇流排的距离位置,进而能够更准确地控制激光焊接头的激光焦距,实现提高焊接控制精度。
27.进一步的,为了实现驱动压头组件40的压紧动作,位移组件20包括固定于安装架10上的驱动组件21、以及安装于所述驱动组件21移动端的连接板22,驱动组件21为位移气缸,连接板22固定在位移气缸的移动端,位移检测器31和压头组件40固定于连接板22上。通过驱动组件21驱动连接板22升降,进而带动压头组件40移动,实现驱动压头组件40压紧汇流排的目的。
28.如图2
‑
3所示,压头组件40包括安装板42以及设置于安装板42上的焊接压头41,在安装板42上安装有用于连接位移组件20的弹性组件43,安装板42通过弹性组件43与位移组件20的连接板22弹性连接,压力检测器32设置在连接板22和安装板42之间,进而在焊接压头41压紧汇流排时,安装板42压缩弹性组件43,再通过连接板22和安装板42之间的压力检测器32实现检测焊接压头41作用在汇流排上的压紧力,进而实现调控焊接压头41的压紧力,确保汇流排与极柱压紧到位,保证焊接质量。
29.进一步的,安装板42固定有供接触件311接触的测量板44。在连接板22上安装有用于固定位移检测器31且呈l形的固定块23,固定块23伸出连接板22的侧方,位移检测器31安装在固定块23上,且接触件311于连接板22的侧方延伸至安装板42的测量板44上,在焊接压头41压紧汇流排过程中,位移检测器31的接触件311接触于测量板44并压缩,通过接触件311位移值精准地获取焊接压头41的位置进而进行汇流排的距离测量,获取汇流排与激光焊接头的距离,实现便于控制激光焦距移动距离,短了激光焊接响应时间,提高效率,相对于压紧之后再通过激光传感器获取汇流排位置的检测方式,本方案采用接触式的位移检测器31,每个焊点时间能够节省0.6s以上,进而能够提高生产效率。
30.其中,如图2所示,弹性组件43包括穿置于安装板42和连接板22的限位导柱431、以及套设于导柱431外周的弹性件432,通过限位导柱431限制安装板42和连接板22之间的最大距离,弹性件432位于安装板42和连接板22之间,进而弹性件432的两端分别作用于安装板42和连接板22。
31.为了实现焊接压头41对焊接过程进行除尘清理,如图3所示,在安装板42上安装有连通焊接压头41的除尘箱体45,除尘箱体45侧面连接有除尘管道46。如图4所示,焊接压头41呈锥形状,焊接压头41的底端部作用于汇流排,通过除尘管道46吹气实现除尘的功能,保证焊接质量。同时在焊接压头41的侧方设有吹气嘴46,通过吹气嘴46吹气实现在焊接过程中对汇流排的焊接位置进行焊渣清除,进一步提高焊接质量。除尘箱体45顶面开设有供激光穿入的入光口451,焊接压头41底端形成有连通入光口451的出光口412,焊接压头41的底端压紧于汇流排,焊接激光通过除尘箱体45的入光口451穿入焊接压头41,并从焊接压头41底端的出光口412射出,进而完成焊接工序。在焊接压头41的底端的外周面开设有若干个气孔411,进而通过气孔411向焊接压头41内输送保护气体。
32.本实施例还提供一种激光焊接机,包括上述激光焊接压头、以及用于焊接产品的激光焊接头,在激光焊接头上装设有用于检测激光焊接头与汇流排水平距离的光学检测组件,结合激光焊接压头上的位移检测器31获取汇流排离激光焊接头的距离,进而便于激光焊接头控制激光焦距,保证焊接准确,提高焊接质量,同时在激光焊接机上还设置有激光位移传感器,通过设置激光位移传感器也可获取汇流排离激光焊接头的距离,进而实现降低容错率,保证焊接效率和质量。
33.综上所述,在本技术一或多个实施方式中,本技术的方案通过在安装架上设置有位移组件,在位移组件上弹性连接有压头组件,位移组件用于驱动压头组件压紧汇流排,使得汇流排与极柱紧密接触,在位移组件上装设有接触于压头组件的检测组件,压头组件压紧汇流排使得汇流排与极柱接触时,通过位移组件上的检测组件精确控制压头组件的压紧力,确保汇流排与极柱紧密接触,保证焊接质量。同时,在压紧汇流排的过程中,检测组件可以通过检测的压头组件位置,实现对汇流排的距离位置进行测量,进而能够较好地控制激光的焦距来控制激光焊接,提高焊接控制精度。
34.以上所述的实施方式,并不构成对该技术方案保护范围的限定。任何在上述实施方式的精神和原则之内所作的修改、等同替换和改进等,均应包含在该技术方案的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。