1.本实用新型涉及一种码垛机组件,具体涉及一种机器人码垛机码垛头,属于码垛机组件技术领域。
背景技术:
2.加气砖厂正常生产现存两种模式,一种是人工装卸车,另一种是带托盘打包线;人工装卸车需要长时间频繁体力活动,因工作脏乱、危险性高、强度大现阶段劳动力已出现缺失;因此,一般采用自动打包线,传统的砌块砖码垛机,包括固定式机架、电控柜、电动机、液压泵站、拖砖到位辊、90
°
旋转的抱砖夹头;其中,抱砖夹头一般都是联动的,即抱砖时,均是整摞抱砖,而对于一些打包线,其完成一捆砖打包后,需要预留叉车插孔位,从而方便叉车将整捆砖拖走,但现有的码垛机其码垛头无法完成上述功能。
技术实现要素:
3.为解决上述问题,本实用新型提出了一种机器人码垛机码垛头,能够实现码垛和码垛后预留叉车孔位。
4.本实用新型的机器人码垛机码垛头,包括
5.一排码垛件,所述码垛件包括横向导轨体;所述横向导轨体中间滑动挂接有液压缸座;所述液压缸座通过螺钉与横向导轨体固定;所述横向导轨体两端滑动挂接有夹持头;所述液压缸座两侧背靠背固定有两液压缸;所述液压缸其活塞杆与夹持头上部固定;所述液压缸通过独立控制阀接入到液压系统;所述控制阀接入plc控制系统;
6.至少两纵向导轨体;所述纵向导轨体与一排横向导轨体垂直固定;且设置于横向导轨体中心线两侧;
7.至少两支撑导轨,所述支撑导轨垂直固定于纵向导轨体顶面;所述支撑导轨与机器人其机械臂输出端固定。
8.码垛时,机器人其机械臂在运输线和打包工位处运转,机器人其机械臂通过支撑导轨和两纵向导轨体驱动整排横向导轨进行同时动作,当机器人旋转到运输线,机械臂将整排码垛件下降到夹持位;从而对整排砖体进行夹持,夹持时, plc控制系统给所有独立控制阀信号,从而液压系统对液压缸给油,从而控制液压缸其活塞杆回缩,两正对的液压缸其活塞杆回缩时,带动夹持头沿横向导轨体进行回缩,从而将整层砖体进行夹持,接着,机器人其机械臂带动整排砖体上升,并回转到打包工位,机器人其机械臂在运输线和打包工位处多次运转,砖体由下完成堆叠多层,直到满足砖体堆叠层数后,进行打包,打包过程中,当砖体层数在叉车插孔位时,一般在第三层或第四层;夹持头先将整排砖体送至打包工位砖体上,接着需要预留叉车孔位的夹持头保持对砖体夹紧,剩余夹持头通过液压缸其活塞杆控制向两侧伸展,此时,机器人其机械臂对整排夹持头上提,预留叉车孔位的两夹持头将砖体上提,使对应叉车层的砖体形成了叉车孔位;并将叉车孔位处上提的砖体送至暂存台。
9.进一步地,两所述纵向导轨体之间设置有油路板;所述油路板输出端各个接口接
入液压缸;所述油路板输入端通过独立控制阀接入到液压系统。
10.进一步地,所述液压缸座底部和夹持头底部间距不小于砖体高度,其能够保证夹持头对砖体夹持时,不会受到液压缸的干涉。
11.进一步地,所述横向导轨体设置有十组。
12.与现有技术相比,本实用新型的机器人码垛机码垛头,能够实现对砖体进行独立夹持和码垛,码垛后预留叉车孔位。
附图说明
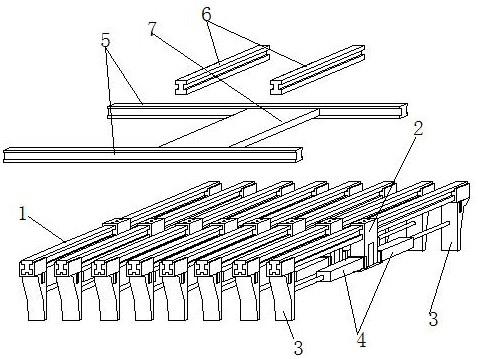
13.图1为本实用新型的实施例1整体结构示意图。
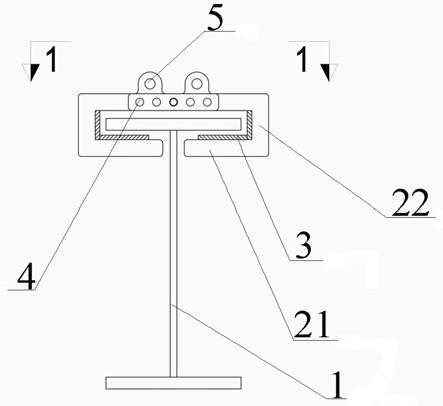
14.图2为本实用新型的一码垛件结构示意图。
具体实施方式
15.实施例1:
16.如图1和图2所示的机器人码垛机码垛头,包括
17.一排码垛件,所述码垛件包括横向导轨体1;所述横向导轨体1中间滑动挂接有液压缸座2;所述液压缸座2通过螺钉与横向导轨体1固定;所述横向导轨体1两端滑动挂接有夹持头3;所述液压缸座2两侧背靠背固定有两液压缸4;所述液压缸4其活塞杆与夹持头3上部固定;所述液压缸4通过独立控制阀接入到液压系统;所述控制阀接入plc控制系统;
18.至少两纵向导轨体5;所述纵向导轨体5与一排横向导轨体1垂直固定;且设置于横向导轨体1中心线两侧;
19.至少两支撑导轨6,所述支撑导轨6垂直固定于纵向导轨体5顶面;所述支撑导轨6与机器人其机械臂输出端固定。
20.码垛时,机器人其机械臂在运输线和打包工位处运转,机器人其机械臂通过支撑导轨和两纵向导轨体驱动整排横向导轨进行同时动作,当机器人旋转到运输线,机械臂将整排码垛件下降到夹持位;从而对整排砖体进行夹持,夹持时, plc控制系统给所有独立控制阀信号,从而液压系统对液压缸给油,从而控制液压缸其活塞杆回缩,两正对的液压缸其活塞杆回缩时,带动夹持头沿横向导轨体进行回缩,从而将整层砖体进行夹持,接着,机器人其机械臂带动整排砖体上升,并回转到打包工位,机器人其机械臂在运输线和打包工位处多次运转,砖体由下完成堆叠多层,直到满足砖体堆叠层数后,进行打包,打包过程中,当砖体层数在叉车插孔位时,一般在第三层或第四层;夹持头先将整排砖体送至打包工位砖体上,接着需要预留叉车孔位的夹持头保持对砖体夹紧,剩余夹持头通过液压缸其活塞杆控制向两侧伸展,此时,机器人其机械臂对整排夹持头上提,预留叉车孔位的两夹持头将砖体上提,使对应叉车层的砖体形成了叉车孔位;并将叉车孔位处上提的砖体送至暂存台。
21.其中,两所述纵向导轨体5之间设置有油路板7;所述油路板7输出端各个接口接入液压缸4;所述油路板7输入端通过独立控制阀接入到液压系统。所述液压缸座2底部和夹持头3底部间距不小于砖体高度,其能够保证夹持头对砖体夹持时,不会受到液压缸的干涉。所述横向导轨体1设置有十组。
22.上述实施例,仅是本实用新型的较佳实施方式,故凡依本实用新型专利申请范围所述的构造、特征及原理所做的等效变化或修饰,均包括于本实用新型专利申请范围内。
技术特征:
1.一种机器人码垛机码垛头,其特征在于:包括一排码垛件,所述码垛件包括横向导轨体;所述横向导轨体中间滑动挂接有液压缸座;所述液压缸座通过螺钉与横向导轨体固定;所述横向导轨体两端滑动挂接有夹持头;所述液压缸座两侧背靠背固定有两液压缸;所述液压缸其活塞杆与夹持头上部固定;所述液压缸通过独立控制阀接入到液压系统;所述控制阀接入plc控制系统;至少两纵向导轨体;所述纵向导轨体与一排横向导轨体垂直固定;且设置于横向导轨体中心线两侧;至少两支撑导轨,所述支撑导轨垂直固定于纵向导轨体顶面;所述支撑导轨与机器人其机械臂输出端固定。2.根据权利要求1所述的机器人码垛机码垛头,其特征在于,两所述纵向导轨体之间设置有油路板;所述油路板输出端各个接口接入液压缸;所述油路板输入端通过独立控制阀接入到液压系统。3.根据权利要求1所述的机器人码垛机码垛头,其特征在于,所述液压缸座底部和夹持头底部间距不小于砖体高度。4.根据权利要求1所述的机器人码垛机码垛头,其特征在于,所述横向导轨体设置有十组。
技术总结
本实用新型公开了一种机器人码垛机码垛头,包括一排码垛件,所述码垛件包括横向导轨体;所述横向导轨体中间滑动挂接有液压缸座;所述液压缸座通过螺钉与横向导轨体固定;所述横向导轨体两端滑动挂接有夹持头;所述液压缸座两侧背靠背固定有两液压缸;所述液压缸其活塞杆与夹持头上部固定;所述液压缸通过独立控制阀接入到液压系统;所述控制阀接入PLC控制系统;至少两纵向导轨体;所述纵向导轨体与一排横向导轨体垂直固定;且设置于横向导轨体中心线两侧;至少两支撑导轨,所述支撑导轨垂直固定于纵向导轨体顶面;本实用新型的机器人码垛机码垛头,能够实现对砖体进行独立夹持和码垛,码垛后预留叉车孔位。码垛后预留叉车孔位。码垛后预留叉车孔位。
技术研发人员:宿宇 魏守迎
受保护的技术使用者:山东路友新材料有限公司
技术研发日:2021.06.08
技术公布日:2021/12/14
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。