1.本实用新型涉及机械手技术领域,具体是一种智能翻转装置。
背景技术:
2.automated guided vehicle,简称agv,通常也称为agv小车,是指装备有电磁或光学等自动导航装置,能够沿规定的导航路径行驶,具有安全保护以及各种移载功能的运输车。agv小车是在工业应用中不需要驾驶员的搬运车,以可充电的蓄电池为其动力来源,一般通过电脑来控制其行进路径以及行为,或利用电磁轨道(electromagnetic path
‑
following system)来设立其行进路径,电磁轨道黏贴于地板上,无人搬运车则依靠电磁轨道所带来的讯息进行移动与动作。
3.agv小车、自动机械臂目前广泛应用于各行各业的智能运输系统,独立的agv小车或者机械臂系统的功能较为单一,机械手的抓取角度和抓取高度与agv托盘升降的最高点存在一定高度差,工件从机械手安全卸料至agv托盘精度比较差,容易掉落,从而产生安全事故。
技术实现要素:
4.本实用新型要解决的技术问题是:解决传统的工件从机械手安全卸料至agv托盘精度差的技术问题。
5.本实用新型提供一种智能翻转装置,用于将机械手中的工件,转移到agv小车上,包括:
6.多个回转夹紧气缸,用于抓取工件;
7.升降组件,用于所述回转夹紧气缸升降;
8.移动组件,用于所述回转夹紧气缸水平移动;
9.旋转组件,用于所述回转夹紧气缸旋转;
10.悬臂,用于安装所述回转夹紧气缸,并调节所述回转夹紧气缸的位置。
11.机械手将工件从流水线搬运至设定位置,回转夹紧气缸在升降组件、移动组件和旋转组件的驱动作用下运行至设定位置,并夹紧工件,然后机械手松开并复位,旋转组件驱动回转夹紧气缸旋转,使工件翻转至水平位置,并在升降组件的作用下下降至设定高度,最后agv小车移动至工件正下方,回转夹紧气缸松开工件,agv小车将工件运行至工作区域;本实用新型实现工件自动卸料,减少人工参与,提高了搬运效率,降低了人工成本,规避了安全隐患,并且安装维护成本低,产品通用性高;悬臂的设置,使回转夹紧气缸位置可以调节,从而适用于不同长度的工件。
12.进一步地,所述升降组件包括立柱和升降板,所述立柱上设有第一直线导轨以及第一滚珠丝杆副,所述升降板在所述第一直线导轨的作用下导向,并通过第一电机驱动所述第一滚珠丝杆副中的的滚珠丝杆实现升降,从而驱动所述回转夹紧气缸升降。升降板与第一直线导轨的滑块固定连接,还与第一滚珠丝杆副中的滚珠丝杆螺母固定连接,如此设
置,结构简单,升降精度高。
13.进一步地,所述移动组件包括设置于所述升降板上的第二直线导轨、第二滚珠丝杆副和连接臂,所述连接臂在所述第二直线导轨的作用下导向,并通过第二电机驱动所述第二滚珠丝杆副中的滚珠丝杆实现水平移动,从而驱动所述回转夹紧气缸水平移动。连接臂与第二直线导轨的滑块固定连接,还与第二滚珠丝杆副中的滚珠丝杆螺母固定连接,如此设置,结构简单,水平移动精度高。
14.进一步地,所述旋转组件设为安装于所述连接臂端部的中空旋转平台,所述悬臂安装在所述中空旋转平台的动力输出端。使用中空旋转平台,不仅旋转精度高,结构紧凑,而且成本低。
15.进一步地,所述悬臂上设有第三直线导轨,所述回转夹紧气缸安装在所述第三直线导轨的滑块上。通过第三直线导轨调节回转夹紧气缸,不仅结构简单,而且调节精度高。
附图说明
16.下面结合附图和实施例对本实用新型进一步说明。
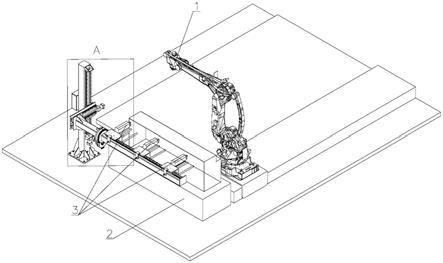
17.图1是本实用新型的结构示意图;
18.图2是图1中a处的放大图;
19.图中:1、机械手;2、agv小车;3、回转夹紧气缸;4、悬臂;51、立柱;52、升降板;53、第一直线导轨;54、第一滚珠丝杆副;55、第一电机;61、第二直线导轨;62、第二滚珠丝杆副;63、连接臂;64、第二电机;7、中空旋转平台;8、第三直线导轨。
具体实施方式
20.现在结合附图对本实用新型作进一步详细的说明。这些附图均为简化的示意图,仅以示意方式说明本实用新型的基本结构,因此其仅显示与本实用新型有关的构成。
21.如图1和图2所示,本实用新型是一种智能翻转装置,用于将机械手1中的工件,转移到agv小车2上,包括升降组件,升降组件包括立柱51和升降板52,立柱51上设有第一直线导轨53以及第一滚珠丝杆副54,升降板52与第一直线导轨53的滑块固定连接,还与第一滚珠丝杆副54中的滚珠丝杆螺母固定连接,并通过第一电机55驱动第一滚珠丝杆副54中的的滚珠丝杆实现升降,而且升降精度高。
22.升降板52上设有移动组件,包括设置于升降板52上的第二直线导轨61、第二滚珠丝杆副62和连接臂64,连接臂64与第二直线导轨61的滑块固定连接,还与第二滚珠丝杆副62中的滚珠丝杆螺母固定连接,并通过第二电机64驱动第二滚珠丝杆副62中的滚珠丝杆实现水平移动,而且水平移动精度高。
23.连接臂64端部安装有中空旋转平台7,中空旋转平台7的动力输出端安装有悬臂4。使用中空旋转平台7,不仅旋转精度高,结构紧凑,而且成本低。
24.悬臂4上设有第三直线导轨8,第三直线导轨8的滑块上安装有多个回转夹紧气缸3;通过第三直线导轨8调节回转夹紧气缸3,不仅结构简单,而且调节精度高。如此设置,使本实用新型适用于不同长度的工件。
25.机械手1将工件从流水线搬运至设定位置,回转夹紧气缸3在升降组件、移动组件和中空旋转平台7的驱动作用下运行至设定位置,并夹紧工件,然后机械手1松开并复位,中
空旋转平台7驱动回转夹紧气缸3旋转,使工件翻转至水平位置,并在升降组件的作用下下降至设定高度,最后agv小车2移动至工件正下方,回转夹紧气缸3松开工件,agv小车2将工件运行至工作区域;本实用新型实现工件自动卸料,减少人工参与,提高了搬运效率,降低了人工成本,规避了安全隐患,并且安装维护成本低,产品通用性高。
26.以上述依据本实用新型的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项实用新型技术思想的范围内,进行多样的变更以及修改。本项实用新型的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
技术特征:
1.一种智能翻转装置,用于将机械手(1)中的工件,转移到agv小车(2)上,其特征在于,包括:多个回转夹紧气缸(3),用于抓取工件;升降组件,用于所述回转夹紧气缸(3)升降;移动组件,用于所述回转夹紧气缸(3)水平移动;旋转组件,用于所述回转夹紧气缸(3)旋转;悬臂(4),用于安装所述回转夹紧气缸(3),并调节所述回转夹紧气缸(3)的位置。2.根据权利要求1所述的一种智能翻转装置,其特征在于:所述升降组件包括立柱(51)和升降板(52),所述立柱(51)上设有第一直线导轨(53)以及第一滚珠丝杆副(54),所述升降板(52)在所述第一直线导轨(53)的作用下导向,并通过第一电机(55)驱动所述第一滚珠丝杆副(54)中的滚珠丝杆实现升降,从而驱动所述回转夹紧气缸(3)升降。3.根据权利要求2所述的一种智能翻转装置,其特征在于:所述移动组件包括设置于所述升降板(52)上的第二直线导轨(61)、第二滚珠丝杆副(62)和连接臂(63),所述连接臂(63)在所述第二直线导轨(61)的作用下导向,并通过第二电机(64)驱动所述第二滚珠丝杆副(62)中的滚珠丝杆实现水平移动,从而驱动所述回转夹紧气缸(3)水平移动。4.根据权利要求3所述的一种智能翻转装置,其特征在于:所述旋转组件设为安装于所述连接臂(63)端部的中空旋转平台(7),所述悬臂(4)安装在所述中空旋转平台(7)的动力输出端。5.根据权利要求4所述的一种智能翻转装置,其特征在于:所述悬臂(4)上设有第三直线导轨(8),所述回转夹紧气缸(3)安装在所述第三直线导轨(8) 的滑块上。
技术总结
本实用新型是一种智能翻转装置,包括:多个回转夹紧气缸,用于抓取工件;升降组件,用于回转夹紧气缸回转夹紧气缸升降;移动组件,用于回转夹紧气缸回转夹紧气缸水平移动;旋转组件,用于回转夹紧气缸回转夹紧气缸旋转;悬臂,用于安装回转夹紧气缸回转夹紧气缸,并调节回转夹紧气缸回转夹紧气缸的位置。机械手将工件从流水线搬运至设定位置,回转夹紧气缸在升降组件、移动组件和旋转组件的驱动作用下运行至设定位置,并夹紧工件,然后机械手松开并复位,旋转组件驱动回转夹紧气缸旋转,使工件翻转至水平位置,并在升降组件的作用下下降至设定高度,准确落入AGV小车上;本实用新型实现工件自动卸料,提高了搬运效率,降低了成本。降低了成本。降低了成本。
技术研发人员:叶航 韩南南 李冲冲 朱子豪
受保护的技术使用者:常州工业职业技术学院
技术研发日:2021.05.21
技术公布日:2021/11/24
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。