技术特征:
1.一种分布式电驱动线控汽车自适应转向助力控制方法,其特征在于,包括以下步骤:11)理想方向盘转矩数据的获取:获取汽车当前工况下的车速v、方向盘转角δ,将其输入理想的方向盘转矩map图,得到理想的方向盘转矩t
swd
;12)跟踪微分器的设计:基于非线性跟踪微分器设计跟踪微分器;13)扩张状态观测器的设计:基于非线性反馈系统设计扩张状态观测器;14)定义非线性误差反馈控制规律;15)对各控制器进行参数优化;16)汽车行驶数据的获取:获取汽车行驶状态下的车速v、方向盘转角δ;17)线控助力转向的自适应控制:将汽车行驶状态下的车速v、方向盘转角δ输入跟踪微分器,经跟踪微分器、扩张状态观测器和非线性误差反馈控制规律处理后输出左右前轮转矩,实现线控转向的自适应助力控制。2.根据权利要求1所述的一种分布式电驱动线控汽车自适应转向助力控制方法,其特征在于,所述跟踪微分器的设计包括以下步骤:21)基于经典非线性跟踪微分器的设计,其表达式如下:式中,t
swd
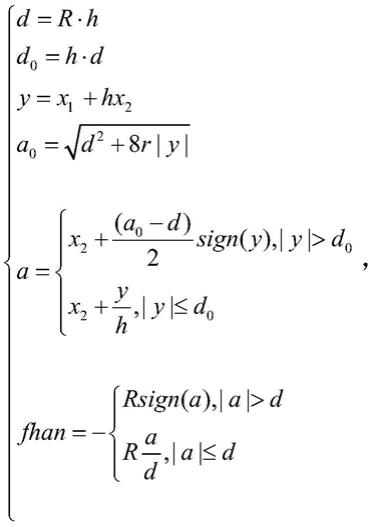
为理想方向盘转矩,r为速度因子,和为状态方程变量;22)采用最速控制综合函数fhan(x1,x2,r,h)设计跟踪微分器,该函数具体公式如下所示:u=fhan(x1,x2,r,h),式中,d、d0、y、a0、a为所设计的跟踪微分器函数内变量,h为跟踪补偿,r为速度因子;
23)将微分跟踪器最终设计为:式中,t
swd
为理想方向盘转矩,r为速度因子,h为跟踪补偿。3.根据权利要求1所述的一种分布式电驱动线控汽车自适应转向助力控制方法,其特征在于,所述扩张状态观测器的设计包括以下步骤:31)对于非线性反馈系统,设计如下形式的状态观测器:式中,y、γ
01
、γ
02
、b为常系数,e为误差项,u为外界输入量,g
i
(e)为满足如下条件的非线性函数:eg
i
(e)≥0;32)选择合适的γ
01
、γ
02
以及非线性函数g
i
(e),使系统精确估计状态变量,并对系统进行状态扩张观测,建立新的线性控制系统;对被扩张的系统建立状态观测器,即扩张状态观测器表达式设定如下:将扩张状态观测其中的|e|
α
sign(e)函数替换为在原点处具有分段性质的函数:式中,φ为线性段的长度;33)最终确定的扩张观测器如下:
式中,e为跟踪误差,t
sw
为理想方向盘转矩,为fal函数参数,γ
01
、γ
02
、γ
03
、b为常系数,α1、α2为fal函数的非线性因子,z1跟踪实际方向盘转矩t
sw
的目标值,z2跟踪方向盘转矩的变化率,z3跟踪系统的总扰动项。4.根据权利要求1所述的一种分布式电驱动线控汽车自适应转向助力控制方法,其特征在于,所述定义非线性误差反馈控制规律包括以下步骤:41)定义非线性反馈控制率:式中,e1为方向盘转矩误差,e2为方向盘转矩变化率误差,γ
01
、γ
02
为非线性组合系数,u0为非线性反馈控制率的输出;42)设计基于误差反馈控制量得到的扰动估计补偿,其表达式如下:其中δt
z
为计算得出的前轮转矩差,b0为补偿因子。5.根据权利要求1所述的一种分布式电驱动线控汽车自适应转向助力控制策略,其特征在于,所述的参数优化包括以下步骤:51)设定非线性误差反馈控制规律中α3取值为0.95,α4取值为1.25;扩张状态观测器中的α1、α2取值为0.5,r为速度因子,取值为10;统一取值为0.01;52)使用退火算法对γ
01
、γ
02
、γ
03
、γ1、γ2、b0进行组合优化。
技术总结
本发明涉及一种分布式电驱动线控汽车自适应转向助力控制方法,与现有技术相比解决了转向助力控制无法实现自适应调整的缺陷。本发明包括以下步骤:理想方向盘转矩数据的获取;跟踪微分器的设计;扩张状态观测器的设计;定义非线性误差反馈控制规律;对各控制器进行参数优化;汽车行驶数据的获取;线控助力转向的自适应控制。本发明使得分布式电驱动线控汽车实际方向盘转矩跟踪理想方向盘转矩,通过控制器计算得到前轮转矩差,分配给前轮后可实现自适应助力转向。适应助力转向。适应助力转向。
技术研发人员:常九健 王家钥
受保护的技术使用者:合肥工业大学智能制造技术研究院
技术研发日:2021.10.29
技术公布日:2021/12/14
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。