1.本发明属于汽车维修领域。
背景技术:
2.挪车装置一般为拖拽结构,拖拽结构对汽车会有一定的损害;现在也有将汽车的四个轮子整体抬升,然后挪车的机构,这种抬升轮胎的机构在抬升后也存在不稳定的现象,因此有必要设计出更加稳定的原地将汽车抬升,然后带动汽车平移的装置。
技术实现要素:
3.发明目的:为了克服现有技术中存在的不足,本发明提供一种汽车维修的车体抬升转移装置与工作方法,能更加稳定的原地将汽车抬升。
4.技术方案:为实现上述目的,本发明的汽车维修的车体抬升转移装置,包括等待抬升转移的汽车;还包括汽车后轮抬升机构,所述汽车后轮抬升机构能将所述汽车的后轮抬升至脱离地面,并且汽车后轮抬升机构能沿地面行走。
5.进一步的,所述汽车后轮抬升机构包括轴承座,所述轴承座内通过轴承转动安装有水平的后转轴,所述后转轴与前后方向垂直;所述后转轴的两端分别同轴心连接有第一支撑轮和第二支撑轮;所述第一支撑轮和第二支撑轮均与地面滚动配合;
6.所述轴承座上通过支撑臂固定连接有后圆弧形抱紧片,所述后圆弧形抱紧片的a凹弧面.同轴心贴合所述在所述后轮的后侧中部高度处的轮面.;
7.所述后圆弧形抱紧片的一侧通过第一固定架固定连接有液压伸缩器,所述液压伸缩器的前部包括两个并列平行的伸缩杆,所述伸缩杆为与地面成夹角的前矮后高的斜向杆;
8.两个并列平行的伸缩杆的前端垂直连接有限位片;所述限位片的侧部固定连接有前圆弧形抱紧片,所述前圆弧形抱紧片的b凹弧面.同轴心贴合所述在所述后轮的前下侧轮面.;所述伸缩杆的伸出和缩回能带动所述后圆弧形抱紧片和前圆弧形抱紧片做相互靠近或相互远离的运动;
9.还包括导孔座,所述导孔座上贯通设置有两导孔,两所述伸缩杆分别滑动穿过两所述导孔,从而使导孔座能沿所述伸缩杆长度方向自由滑动;
10.所述导孔座的一侧固定连接有机构支架,所述机构支架的末端下侧固定安装有第二轴承座,所述第二轴承座的下端轴承孔内通过轴承转动安装有水平的浮动转轴所述浮动转轴与所述后转轴平行;所述浮动转轴上分别同轴心一体化连接有涡轮和抓地轮,所述抓地轮与所述地面滚动配合;所述机构支架的一侧固定安装有电机支架,所述电机支架上固定安装有涡杆驱动电机,所述蜗杆电机的输出轴上同轴心连接有蜗杆,所述蜗杆与所述涡轮传动配合。
11.进一步的,所述后轮还没有脱离地面时,所述伸缩杆与地面所成的夹角范围是10
°
至30
°
。
12.进一步的,两导孔的内壁均涂有润滑脂。
13.进一步的,所述抓地轮的轮面有防滑花纹。
14.进一步的,所述机构支架远离电机支架的一侧固定安装有伸缩器支架,所述伸缩器支架上固定安装有限位伸缩器,所述限位伸缩器的限位伸缩杆与所述伸缩杆垂直;所述限位伸缩杆的末端固定连接有夹持块;
15.当导孔座沿所述伸缩杆长度方向向前滑动至接触所述限位片后侧面的基础上,所述限位伸缩杆带动夹持块的伸出能使所述限位片刚好夹在所述夹持块与导孔座之间。
16.进一步的,所述汽车后轮抬升机构共有两个;还包括与两所述汽车后轮抬升机构对称的两个汽车前轮抬升机构;两所述汽车后轮抬升机构将汽车的两个后轮抬升的同时,两个汽车前轮抬升机构将汽车的两个前轮抬升;这时汽车整体会被抬升。
17.进一步的,汽车维修的车体抬升转移装置的后轮抬升方法:
18.初始状态下,等待抬升的后轮是与地面接触的,先控制液压伸缩器,使伸缩杆的伸出,从而使后圆弧形抱紧片和前圆弧形抱紧片处于足够远的位置,然后让后圆弧形抱紧片置于后轮后侧,前圆弧形抱紧片置于后轮前侧,这时控制液压伸缩器,使伸缩杆逐渐缩回,进而使后圆弧形抱紧片与前圆弧形抱紧片相互靠近至抱紧后轮的前后侧;这时后圆弧形抱紧片的a凹弧面.同轴心贴合在所述后轮的后侧中部高度处的轮面.;前圆弧形抱紧片的b凹弧面.同轴心贴合在所述后轮的前下侧轮面.,这时将液压伸缩器锁定;
19.然后控制蜗杆电机,进而蜗杆带动涡轮缓慢逆时针回转,从而使抓地轮跟着逆时针回转,由于抓地轮与地面是滚动配合的,因此抓地滚轮的逆时针回转会使抓地滚轮在地面向前滚动,向前滚动的抓地滚轮会反过来带动导孔座同步跟着向前做运动,由于这时的伸缩杆为与地面成夹角的前矮后高的斜向杆,因此导孔座向前运动的过程中伸缩杆与地面形成的夹角会逐渐变小,根据几何关系,伸缩杆的前端会逐渐被抬升,从而使后轮在后圆弧形抱紧片与前圆弧形抱紧片的紧密抱紧的基础上逐渐脱离地面;后轮在离地的过程中会对前圆弧形抱紧片形成一个向下的反作用力f,所述反作用力f经过力传递部分转换成抓地滚轮与地面之间的压力,从而实现了汽车的重量与抓地滚轮与地面之间的压力呈正相关,进而保证了抓地滚轮的“抓地性能”,避免抓地滚轮向前滚动的过程中发生打滑的现象;
20.随着抓地滚轮的继续向前滚动,后轮继续被抬升,当导孔座沿伸缩杆长度方向向前滑动至接触所述限位片后侧时,说明这时的后轮已经被抬升至预定高度,这时控制限位伸缩杆带动夹持块的伸出,使限位片刚好夹在夹持块与导孔座之间,从而使抓地滚轮与第一支撑轮和第二支撑轮的相对位置在后续过程中不会发生变化;这时第一支撑轮、第二支撑轮和抓地滚轮共同支撑起一个后轮;
21.当汽车的四个轮子都按上面的方法被抬升时,再控制各个制蜗杆电机,从而使抓地滚轮主动旋转,进而带动被抬升的汽车水平位移。
22.有益效果:本发明的采用抱合结构,车轮被抬升过程稳定,而且抓地滚轮在车体被抬升后还起到了驱动轮的作用;后轮在离地的过程中会对前圆弧形抱紧片形成一个向下的反作用力f,所述反作用力f经过力传递部分转换成抓地滚轮与地面之间的压力,从而实现了汽车的重量与抓地滚轮与地面之间的压力呈正相关,进而保证了抓地滚轮的“抓地性能”,避免抓地滚轮向前滚动的过程中发生打滑的现象。
附图说明
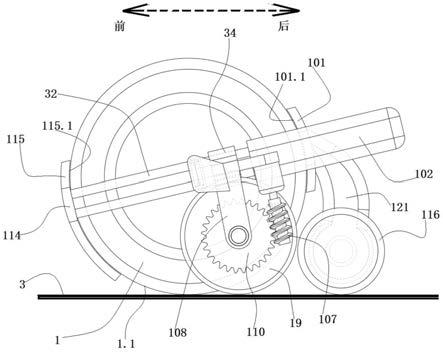
23.附图1为本装置的整体结构示意图(后轮没有离地);
24.附图2为附图1的另一视角示意图;
25.附图3为附图1的基础上的汽车后轮抬升机构与汽车的后轮分离的示意图;
26.附图4为汽车的后轮被汽车后轮抬升机构抬升后的示意图;
27.附图5为附图4的标记120处的放大示意图;
28.附图6为后轮没有离地的结构示意图;
29.附图7为后轮离地时的示意图。
具体实施方式
30.下面结合附图对本发明作更进一步的说明。
31.如附图1至7所示的汽车维修的车体抬升转移装置,包括等待抬升转移的汽车;其特征在于:还包括汽车后轮抬升机构,所述汽车后轮抬升机构能将所述汽车的后轮1抬升至脱离地面3,并且汽车后轮抬升机构能沿地面行走。
32.所述汽车后轮抬升机构包括轴承座119,所述轴承座119内通过轴承转动安装有水平的后转轴118,所述后转轴118与前后方向垂直;所述后转轴118的两端分别同轴心连接有第一支撑轮116和第二支撑轮117;所述第一支撑轮116和第二支撑轮117均与地面滚动配合;
33.所述轴承座119上通过支撑臂121固定连接有后圆弧形抱紧片101,所述后圆弧形抱紧片101的a凹弧面101.1同轴心贴合所述在所述后轮1的后侧中部高度处的轮面1.1;
34.所述后圆弧形抱紧片101的一侧通过第一固定架100固定连接有液压伸缩器102,所述液压伸缩器102的前部包括两个并列平行的伸缩杆32,所述伸缩杆32为与地面3成夹角的前矮后高的斜向杆;
35.两个并列平行的伸缩杆32的前端垂直连接有限位片114;所述限位片114的侧部固定连接有前圆弧形抱紧片115,所述前圆弧形抱紧片115的b凹弧面115.1同轴心贴合所述在所述后轮1的前下侧轮面1.1;所述伸缩杆32的伸出和缩回能带动所述后圆弧形抱紧片101和前圆弧形抱紧片115做相互靠近或相互远离的运动;
36.还包括导孔座34,所述导孔座34上贯通设置有两导孔38,两所述伸缩杆32分别滑动穿过两所述导孔38,从而使导孔座34能沿所述伸缩杆32长度方向自由滑动;
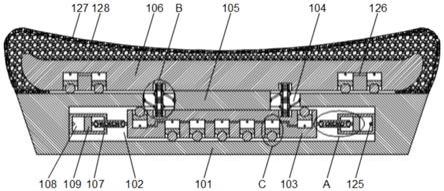
37.所述导孔座34的一侧固定连接有机构支架103,所述机构支架103的末端下侧固定安装有第二轴承座108,所述第二轴承座108的下端轴承孔内通过轴承转动安装有水平的浮动转轴109所述浮动转轴109与所述后转轴118平行;所述浮动转轴109上分别同轴心一体化连接有涡轮110和抓地轮19,所述抓地轮19与所述地面3滚动配合;所述机构支架103的一侧固定安装有电机支架104,所述电机支架104上固定安装有涡杆驱动电机105,所述蜗杆电机105的输出轴106上同轴心连接有蜗杆107,所述蜗杆107与所述涡轮110传动配合。
38.所述后轮1还没有脱离地面时,所述伸缩杆32与地面3所成的夹角范围是10
°
至30
°
;本实施例的两导孔38的内壁均涂有润滑脂;所述抓地轮19的轮面有防滑花纹。
39.所述机构支架103远离电机支架104的一侧固定安装有伸缩器支架111,所述伸缩器支架111上固定安装有限位伸缩器112,所述限位伸缩器112的限位伸缩杆116与所述伸缩
杆32垂直;所述限位伸缩杆116的末端固定连接有夹持块113;
40.当导孔座34沿所述伸缩杆32长度方向向前滑动至接触所述限位片114后侧面的基础上,所述限位伸缩杆116带动夹持块113的伸出能使所述限位片114刚好夹在所述夹持块113与导孔座34之间。
41.所述汽车后轮抬升机构共有两个;还包括与两所述汽车后轮抬升机构对称的两个汽车前轮抬升机构;两所述汽车后轮抬升机构将汽车的两个后轮抬升的同时,两个汽车前轮抬升机构将汽车的两个前轮抬升;这时汽车整体会被抬升。
42.汽车维修的车体抬升转移装置的后轮抬升总体过程和工作原理:
43.初始状态下,等待抬升的后轮1是与地面3接触的,先控制液压伸缩器102,使伸缩杆32的伸出,从而使后圆弧形抱紧片101和前圆弧形抱紧片115处于足够远的位置,然后让后圆弧形抱紧片101置于后轮1后侧,前圆弧形抱紧片115置于后轮1前侧,这时控制液压伸缩器102,使伸缩杆32逐渐缩回,进而使后圆弧形抱紧片101与前圆弧形抱紧片115相互靠近至抱紧后轮1的前后侧;这时后圆弧形抱紧片101的a凹弧面101.1同轴心贴合在所述后轮1的后侧中部高度处的轮面1.1;前圆弧形抱紧片115的b凹弧面115.1同轴心贴合在所述后轮1的前下侧轮面1.1,这时将液压伸缩器102锁定;
44.然后控制蜗杆电机105,进而蜗杆107带动涡轮110缓慢逆时针回转,从而使抓地轮19跟着逆时针回转,由于抓地轮19与地面是滚动配合的,因此抓地滚轮19的逆时针回转会使抓地滚轮19在地面3向前滚动,向前滚动的抓地滚轮19会反过来带动导孔座34同步跟着向前做运动,由于这时的伸缩杆32为与地面3成夹角的前矮后高的斜向杆,因此导孔座34向前运动的过程中伸缩杆32与地面3形成的夹角会逐渐变小,根据几何关系,伸缩杆32的前端会逐渐被抬升,从而使后轮1在后圆弧形抱紧片101与前圆弧形抱紧片115的紧密抱紧的基础上逐渐脱离地面3;后轮1在离地的过程中会对前圆弧形抱紧片115形成一个向下的反作用力f,所述反作用力f经过力传递部分转换成抓地滚轮19与地面3之间的压力,从而实现了汽车的重量与抓地滚轮19与地面3之间的压力呈正相关,进而保证了抓地滚轮19的“抓地性能”,避免抓地滚轮19向前滚动的过程中发生打滑的现象;
45.随着抓地滚轮19的继续向前滚动,后轮1继续被抬升,当导孔座34沿伸缩杆32长度方向向前滑动至接触所述限位片114后侧时,说明这时的后轮1已经被抬升至预定高度,这时控制限位伸缩杆116带动夹持块113的伸出,使限位片114刚好夹在夹持块113与导孔座34之间,从而使抓地滚轮19与第一支撑轮116和第二支撑轮117的相对位置在后续过程中不会发生变化;这时第一支撑轮116、第二支撑轮117和抓地滚轮19共同支撑起一个后轮1;
46.当汽车的四个轮子都按上面的方法被抬升时,再控制各个制蜗杆电机105,从而使抓地滚轮19主动旋转,进而带动被抬升的汽车水平位移。
47.以上所述仅是本发明的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。