1.本发明涉及高空作业辅助设备领域,具体涉及一种配网高空作业智能安全带及预警系统。
背景技术:
2.高空作业是配网检修的基本操作,安全带作为防止高空坠落的主要防护工具有着重要作用。高处作业应正确使用安全带;当高度超过1.5m时,应使用安全带;攀登杆塔和转移位置时不应失去安全带的保护;作业过程中,应随时检查安全带是否拴牢。配网高空作业主要采用全身式安全带。若安全带各个卡扣、挂钩之间出现不连接或连接错误时,将严重威胁高空作业人员的人身安全,不利于高空作业的安全有效开展。
3.目前,地面上安全带佩戴检查通常采用人眼检查模式进行,该方法可以在一定程度上保证安全装置是否安装到位,但这与检查人员的责任心、细致度有密切关系,不能百分之百保证安全;高空作业过程中,地面监护人员也会时时关注安全带的佩戴状态,但由于作业位置距地高度较高,地面监护人员需仰视对其进行观察监护,天空光线相对刺眼,加之安全带卡扣、挂钩相对较小且安装位置较为隐蔽,地面监护人员不易观察,严重影响地面监护人员对于高空作业人员情况的判断能力,一旦出现未扣好安全带或脱扣,将无法及时对高空作业人员发出警告提醒并责令整改。鉴于此一种能够实时检测安全带状态的智能高空配网安全带很有必要。
技术实现要素:
4.有鉴于此,本发明的目的之一是提供一种配网高空作业智能安全带,能够实时检测安全带状态并进行报警,有效地保障了高空作业人员的人身安全;本发明的目的之二是提供一种一种配网高空作业智能安全带预警系统。
5.本发明的目的之一是通过以下技术方案实现的:
6.一种配网高空作业智能安全带,所述预警系统包括安全带本体和安全带预警终端;
7.安全带本体,所述安全带本体上设置有安全带预警终端;
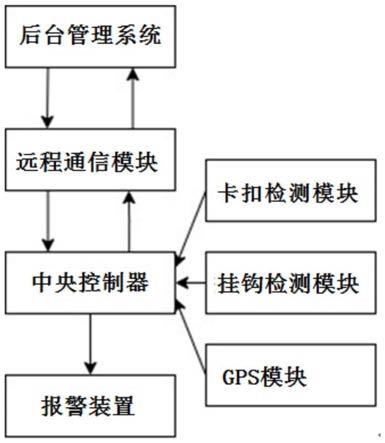
8.所述安全带预警终端包括有卡扣检测模块、挂钩检测模块、gps模块、中央控制器、报警装置和供电模块,所述卡扣检测模块、挂钩检测模块、gps模块、报警装置、供电模块与中央控制器电联接,所述供电模块用于向安全带本体上的其他模块进行供能;
9.安全带预警终端用于安装在高空作业人员的身上,安全带可实时检测作业人员包括离地高度、安全带卡扣连接状态、挂锁连接状态在内的各项信息,依据其内部预设逻辑进行自动判断,并进行报警提醒同时结合后台管理系统实现对安全带佩戴行为的远程实时监测。
10.进一步,所述卡扣检测模块包括微型压力传感器芯片,其安装的位置包括但不限于安全带本体胸带、腰带和腿带的卡扣;卡扣正确安装时电路接通;当卡扣未插或未插紧时
电路断开,通过卡扣检测模块传输的电信号确定卡扣的闭合状态。
11.进一步,所述挂钩检测模块包括通过探测挂锁的锁体、扣体的接触情况,进而传输挂锁的悬挂状态信号至中央控制器;
12.所述挂钩检测模块包括:挂钩检测传感器、第五电阻、第六电阻、第一发光二极管、第一光耦合器;
13.所述第一光耦合器的发光二极管的阳极与挂钩检测传感器的引脚2电连接,中间串联第五电阻;所述第一光耦合器的发光二极管的阴极接地;
14.第一光耦合器的开关管的集电极与电源连接;
15.所述第一光耦合器的开关管的发射极与中央控制器的一个独立的io端口连接,且通过连接第六电阻接地。
16.进一步,所述gps模块中微型gps传感器实时检测作业人员的离地高度,当gps信号器上升超过设定高度时,系统开始检测其他卡扣、挂锁的状态,结合其他参数信息进行综合报警。
17.进一步,所述设定高度为1.5m。
18.进一步,所述中央控制器与各模块电连接,内置控制逻辑软件,实现对各传感器状态信号、海拔高度信号、电源信号、报警信号、信号传输的综合控制与处理。
19.进一步,所述报警装置模块包括:蜂鸣器、警报灯、第五十四电阻、第十三极管和第九二极管,所述第十三极管的基极与中央控制器的一个独立的io接口连接,中间串联第五十四电阻;第十三极管的集电极接地;第十三极管的发射极与蜂鸣器2引脚相连;第十三极管的发射极与第九二极管的阳极连接;所述第九二极管的阴极与电源连接;第九二极管与蜂鸣器与警报灯并联,当任意检测模块出现状况时,蜂鸣器报警且警报灯闪烁。
20.进一步,所述智能安全带还包括远程通信模块,所述远程通信模块与中央控制器电联接,所述卡扣检测模块、挂钩检测模块、gps模块输出的状态信号经中央控制器处理后,通过远程通信模块实现实时的远程信息传输。
21.进一步,每一套安全带预警终端采用独立的通信收发信道,所述远程通信模块采用4g通信芯片。
22.本发明的目的之二是通过以下技术方案实现的:一种配网高空作业智能安全带预警系统,包括如前所述一种配网高空作业智能安全带,还包括后台管理系统,所述后台管理系统接收配网高空作业智能安全带发来的信号并进行实时监控。
23.本发明的有益效果是:
24.目前,安全带佩戴检测通常通过人眼检测的方式进行,不能保证绝对的安全,高空作业时,作业人员与地面的检查人员距离较远,经常会因为光线和视力等原因导致判断失误,无法及时对高空作业人员提出及时的警告,导致出现安全隐患;与现有技术相比,本发明的智能安全带及预警系统可实时检测作业人员离地高度、安全带卡扣连接状态、挂锁连接状态等信息,依据其内部预设逻辑进行自动判断,实现对安全带佩戴行为的远程实时监测,并进行报警提醒,保证高空作业人员人身安全,为安全防控由单纯“人控”向“机控”为主的现代化安全防控模式转变做出贡献。
25.本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可
以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书和前述的权利要求书来实现和获得。
附图说明
26.为了使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作进一步的详细描述,其中:
27.图1是一个实施例的一种配网高空作业智能安全带预警系统流程示意图;
28.图2是一个实施例的gps模块的电路结构示意图;
29.图3是一个实施例的远程通信模块的电路结构示意图;
30.图4是一个实施例的卡扣检测模块的电路结构示意图;
31.图5是一个实施例的挂钩检测模块的电路结构示意图;
32.图6是一个实施例的中央控制器模块的电路结构示意图;
33.图7是一个实施例的报警装置的电路结构示意图。
具体实施方式
34.以下将参照附图,对本发明的优选实施例进行详细的描述。应当理解,优选实施例仅为了说明本发明,而不是为了限制本发明的保护范围。
35.实施例一
36.本实施例提出了一种配网高空作业智能安全带,包括:安全带本体和安全带预警终端;
37.安全带预警终端包括:卡扣检测模块、挂钩检测模块、gps模块、中央控制器、报警装置和供电模块;
38.安全带预警终端安装在高空作业人员的身上;
39.安全带在工作状态下,安全带胸带、腰带、腿带之间主要采用卡扣方式进行连接,围杆带(一保)、后备保护绳(二保)主要采用挂钩方式进行连接;
40.安全带可实时检测作业人员离地高度、安全带卡扣连接状态、挂锁连接状态等信息,依据其内部预设逻辑进行自动判断,并进行报警提醒。
41.在一个实施例中,如图2所示,gps模块包括:gps传感器芯片、第三十九~第四十二电容c39~c42和三号天线接口ant3;gps芯片的型号为atgm332d;所述gps芯片的gnd引脚接地;所述gps芯片的vcc引脚与第四十一电容连接;gps芯片的vcc_rf引脚与第三十九和第四十电容连接;第三十九和第四十电容并联;gps芯片的rf_in引脚与第四十二电容连接。
42.本实施例中,如图4所示,安全带的卡扣检测模块包括:卡扣传感器(微型压力传感器芯片)、第十六电阻r16、第十八电阻r18和第二三极管q2。卡扣传感器为磁电传感器,型号为u201,其1引脚与电源连接,3引脚接地,2引脚与第十六电阻连接;所述第二三极管q2的型号为s8550,类型为pnp型,基极与第十六电阻连接,发射极与电源连接,集电极与第十八电阻连接;第十八电阻接地;所述第二三极管集电极与第十八电阻之间有第一io端口。
43.本实施例中,如图5所示,挂钩检测模块包括:挂钩检测传感器(金属接触式传感器)、第五~第六电阻r5~r6、第一发光二极管led1、第一光耦合器u1;所述第一光耦合器的型号为tlp291(se;第一光耦合器的发光二极管的阳极与挂钩检测传感器的2引脚连接,中
间串联第五电阻;第一光耦合器的发光二极管的阴极接地;第一光耦合器的开关管的集电极与电源连接;第一光耦合器的开关管的发射极与第二io端口连接;第一光耦合器的开关管的发射极与第二io端口之间有一第六电阻接地;所述挂钩检测传感器的1引脚与电源连接。
44.本实施例中,如图6所示,所述中央控制器模块的mcu型号是stm32f103vct6;mcu的pa1引脚接收ad_in信号;mcu的pa2引脚接收usb_in信号;mcu的pa8引脚接收upright_in信号;mcu的pa11引脚接收back_belt_in信号;mcu的pa12引脚接收yl_belt1_in信号;mcu的pc9引脚接收middle_belt_in的信号;mcu的pd1引脚接收waist_in信号;mcu的pd2引脚接收left_leg_in信号;mcu的pd3引脚接收chest_in信号;mcu的pd4引脚接收right_leg_in信号;mcu的boot0引脚通过与第十四电阻r14串联接地;mcu的nrst引脚通过与第十二电阻r12串联和电源连接;mcu的nrst引脚通过与第十电容c10串联接地。
45.本实施例中,如图7所示,报警装置模块包括:蜂鸣器、警报灯、第五十四电阻d54、第十三极管q10和第九二极管d9;第十三极管的基极与第三io接口连接,中间串联第五十四电阻;第十三极管的集电极接地;第十三极管的发射极与蜂鸣器的2引脚连接;第十三极管的发射极与第九二极管的阳极连接;第九二二极管的阴极与电源连接;第九二极管与蜂鸣器与警报灯并联。
46.实施例二
47.本实施例与实施例一的不同之处在于,本实施例的安全带预警终端还包括了远程通信装置模块,远程通信模块与中央控制器电联接,卡扣检测模块、挂钩检测模块、gps模块输出的状态信号经中央控制器处理后,通过远程通信模块实现实时的远程信息传输。
48.如图3所示,本实施例中,远程通信模块采用4g通信芯片,4g芯片的型号是ec200s
‑
cn;4g芯片的gnd引脚接地;4g芯片的status引脚与第八发光二极管d8的阴极连接并与第三十四电阻r34串联;4g芯片的ant_main引脚与一号天线接口ant1的1引脚连接并与第三十五电阻r35串联;4g芯片的ant_gnss引脚与二号天线接口的1引脚相连并与第二十七电容c27串联;4g芯片的vbat_bb引脚与第三十六电阻r36连接,第三十六电阻与第一磁芯电感器l1连接,第二十六电容c26接地,与第三十六电阻和第一磁芯电感器并联;第二十六电容与第二十七电容并联;所述4g芯片的reset_n引脚与第七三极管q7的集电极连接;第七三极管的发射极接地;第七三极管的基级与4g芯片的4g_rst引脚连接,中间串联第四十六电阻r46;所述4g芯片的pwrkey引脚与第五三极管q5的集电极连接;第五三极管的发射极接地;第五三极管的基级与4g芯片的4g_pwr引脚连接,中间串联第四十电阻r40;芯片的vdd_ext引脚与第八三极管q8的集电极连接,中间串联第四十三电阻r43;第八三极管的发射极接地;第八三极管的基极和第八三极管的发射极并联第五十电阻r50;第八三极管的基极与第四十七电阻r47串联;所述芯片的vdd_ext引脚与第四十八电阻r48连接,第四十八电阻与第三十三电容c33并联;第四十八电阻与第九三极管q9的基极连接;芯片的vdd_ext引脚与第四十二电阻r42连接;所述芯片的vdd_ext引脚与第第四十五电阻r45连接,第四十五电阻与第三十二电容c32并联,并与第六三极管的基极连接;所述芯片的vdd_ext引脚所述4g芯片的usim_data引脚与sim1模块的data引脚连接;usim_presence引脚与sim1模块的presence引脚连接;usim_vdd引脚与sim1模块的vcc引脚连接;usim_rst引脚与sim1模块的rst引脚连接;usim_clk引脚与sim1模块的clk引脚连接。
49.根据系统通讯组网协议(4g),下位机常规数据帧中data0长度为1字节,data0的第一位表示腰带挂钩状态输入,1代表:已扣好;2代表:未扣。第二位表示背钩卡扣状态输入,1代表:已扣好;2代表:未扣。第三位表示挂钩状态输入,1代表:已挂好;2代表:未正确连接。第四位表示左腿卡扣状态输入,1代表:已扣好;2代表:未扣。第五位表示右腿卡扣状态输入,1代表:已扣好;2代表:未扣。第六位表示腰部卡扣状态输入,1代表:已扣好;2代表:未扣。第七位表示胸部卡扣状态输入,1代表:已扣好;2代表:未扣。第八位表示报警状态,1代表:报警;2代表:未报警;
50.根据系统通讯组网协议(4g),下位机常规数据帧中data1和data2长度均为1字节,表示高空作业人员所处位置过高,比实际值扩大10倍,保留一位小数;
51.根据系统通讯组网协议(4g),下位机常规数据帧中data3长度为1字节,表示电量;
52.根据系统通讯组网协议(4g),下位机常规数据帧中data(4~7)长度为4字节,表示定位数据的经度,比实际值扩大105倍;
53.根据系统通讯组网协议(4g),下位机常规数据帧中data(8~11)长度为4字节,表示定位数据的纬度,比实际值扩大105倍。
54.实施例三
55.如图1所示,本实施例提供了一种配网高空作业智能安全带预警系统,包括如实施例一和实施例二的配网高空作业智能安全带,还包括后台管理系统,后台管理系统通过4g网络与远程通信装置进行无线通讯,并接收中央控制器收集的作业人员离地高度、安全带卡扣连接状态、挂锁连接状态、报警信息等各类信息。实现了远程的实时监控。
56.以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
57.在本发明的描述中,需要理解的是,术语“纵向”、“长度”、“周向”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有
58.特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
59.在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接或可以互相通讯;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
60.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
61.最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本技术方案的宗旨和范围,其均应涵盖在本发明
的权利要求范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。