1.本发明涉及机械自动化技术领域,尤其是一种钢轴机。
背景技术:
2.现有的马达一般包括有机壳以及与机壳配合的钢轴,在马达装配过程中,钢轴与机壳压合于一起。现有技术普遍采用手工作业的方式将钢轴与机壳压合于一起,自动化程度低、工作效率低,且由于人为因素所存在的不稳定性的情况,产品质量很难保证。
技术实现要素:
3.本发明通过提供一种钢轴机,用于解决上述所提出的问题。
4.本发明的目的可通过以下技术方案实现:
5.一种钢轴机,包括:
6.底座,所述底座由机架、封板和活动门组成,所述机架底端设有垫脚;
7.输送模块,所述输送模块设于底座上方,包括了下料架,所述输送模块包括了运输组件、送风组件、驱动端和压合组件,所述送风组件设于运输组件上方,所述送风组件包括了外壳和微型风扇,所述驱动端设于运输组件下方,所述驱动端包括了延伸架、运输电机和保护外罩,所述压合组件设于送风组件右侧,所述压合组件包括了l形架、压合气缸和压合盘,所述运输组件设有立架、驱动轴承和输送盘带;
8.送料模块,所述送料模块设于输送模块前端,包括了送料电机,所述送料模块包括了存料架、出料座和推料气缸,所述存料架设于出料座上方,包括了导料板和限位板,所述推料气缸设于出料座左侧,包括了垫座,所述出料座包括了前板、后板和分流盘,所述前板设于分流盘左侧,包括了隔板,所述后板设于分流盘右侧,包括了导流盘,所述分流盘设有驱动轴;
9.组合操作工装,所述组合操作工装设于输送模块右侧,包括了修正组件和填充组件,所述修正组件和填充组件交错配置。
10.所述输送模块还设有感应组件,所述感应组件设于输送模块右侧。
11.所述填充组件还设有感应配对件。
12.所述垫脚为矩形块,所述矩形块设有通孔。
13.所述组合操作工装包括了基座,所述基座可为四轴机器人或五轴机器人。
14.本发明的有益效果:
15.本发明提供一种钢轴机,通过机械自动化操作完成了钢轴安装的工序,减少了人工的成本,提高的生产的效率,保证了工件的合格率。
附图说明
16.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本
发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图示出的结构获得其他的附图。
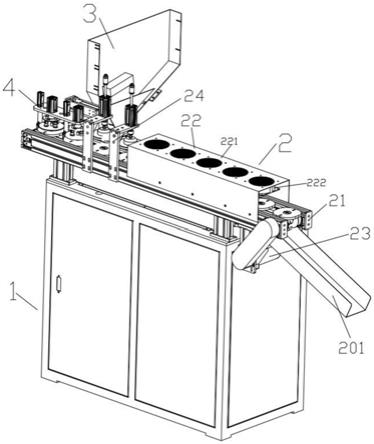
17.图1为本发明的整体结构示意图之一。
18.图2为本发明的整体结构示意图之二。
19.图3为本发明的整体结构示意图之三。
20.图4为本发明的送料模块结构示意图之一。
21.图5为本发明的送料模块结构示意图之二。
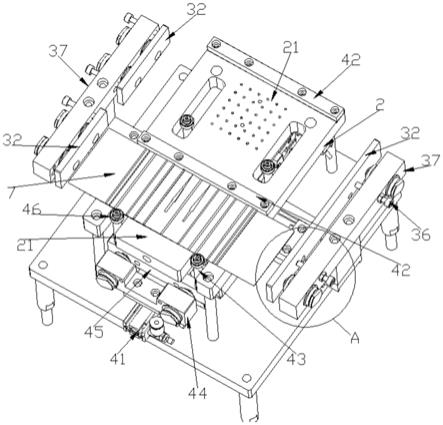
22.图6为本发明的组合操作工装结构示意图。
23.本发明目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
24.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
25.根据图1
‑
6所示:
26.一种钢轴机,包括:
27.底座1,所述底座1由机架、封板和活动门组成,所述机架底端设有垫脚,在本实施案例中,封板与活动门铺设于机架表面;
28.输送模块2,所述输送模块2设于底座1上方,包括了下料架201,所述输送模块2包括了运输组件21、送风组件22、驱动端23和压合组件24,所述送风组件22设于运输组件21上方,所述送风组件22包括了外壳221和微型风扇222,在本实施案例中,所述送风组件22为运输组件21长度的三分之二,其中微型风扇222间隔设于外壳221内部,且为五组,所述驱动端23设于运输组件21下方,所述驱动端23包括了延伸架231、运输电机232和保护外罩233,所述运输电机232设于延伸架231下方,且与运输组件21配对连接,其中的驱动带由保护外罩233保护,所述延伸架231底端为运输电机232固定座,同时也是调节座,具体的为面端设有调节槽,便于上下调整,调节驱动带松紧度,所述压合组件24设于送风组件22右侧,所述压合组件24包括了l形架241、压合气缸242和压合盘243,在本实施案例中,l形架241为倒置的,上方为压合气缸242,压合盘243设于l形架241内侧,且被上方压合气缸242的连接,而压合盘243为软盘,使压合气缸242进行对压合盘243压缩处理,使工件之间完成配合,所述运输组件21设有立架211、驱动轴承212和输送盘带213,在本实施案例中,输送盘带213与驱动轴承212设于立架内部,且相互配合设计,且输送盘带213间隔设有若干物料盘,而物料盘用于放置工件,用于配合组合操作工装4进行下料,其中,立架211由架腿和滑槽铝型材组合构成,便于外接件进行固定连接;
29.送料模块3,所述送料模块3设于输送模块2前端,包括了送料电机301,所述送料模块3包括了存料架31、出料座32和推料气缸33,所述存料架31设于出料座32上方,包括了导料板311和限位板312,在本实施案例中,存料架31用于存放并有序输送工件,其中限位板312根据工件的大小进行调节,避免工件排列不整齐,从而造成的卡壳现象,而导料板311是为了区分底层与顶层的工件,避免工件造成顺序错位和下料速率,减少卡壳的情况,所述推
料气缸33设于出料座32左侧,包括了垫座,在本实施案例中,推料气缸33用于配合出料座32,应用于单一工件出料的动力源,所述出料座32包括了前板321、后板322和分流盘323,所述前板321设于分流盘323左侧,包括了隔板3211,在本实施案例中,前板321面端设于观察口,查看下料和清理工件等作用,其中,隔板3211是与前板321相契合,使其与前板321形成一个便于打开的槽口,所述后板322设于分流盘323右侧,包括了导流盘3221,在本实施案例中,后板322与前板321均为螺栓固定于出料座32面端,其中导流盘3221是用于与组合操作工装4进行配对连接,具体为引导槽口之间的对接,所述分流盘323设有驱动轴3231,在本实施案例中,分流盘323外侧均匀设有凹槽,且用于摆放工件,由驱动轴3231连接送料电机301实现定向输送工件;
30.组合操作工装4,所述组合操作工装4设于输送模块2右侧,包括了修正组件41和填充组件42,所述修正组件41和填充组件42交错配置,在本实施案例中,修正组件41和填充组件42均由气缸运作,其中,填充组件42是由外管配合气缸组合,外管用于收取工件,而气缸用于挤压工件,所述修正组件41用于运输和修正运输盘中工件,使组合操作工装4具有双重运输作用。
31.所述输送模块2还设有感应组件25,所述感应组件25设于输送模块2右侧,在本实施案例中,感应组件25包括了两组感应头,且与组合操作工装4平行相对,用于识别组合操作工装4。
32.所述填充组件42还设有感应配对件421,在本实施案例中,感应配对件421设于填充组件42末端,且为内侧,所述感应配对件421与感应组件25成配对组合。
33.所述垫脚为矩形块,所述矩形块设有通孔,在本实施案例中,矩形块避免底座1底端与地面造成磨损,同时可以加装滚轮。
34.所述组合操作工装4包括了基座,所述基座可为四轴机器人或五轴机器人,在本实施中,组合操作工装4由四轴机器人或五轴机器人进行驱动,应用于本装置的机械化生产中。
35.以上所述仅为本发明的优选实施例,并非因此限制本发明的专利范围,凡是在本发明的发明构思下,利用本发明说明书及附图内容所作的等效结构变换,或直接/间接运用在其他相关的技术领域均包括在本发明的专利保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。