1.本发明涉及开椰机技术领域,更具体地说,涉及一种开椰机夹持座、开椰机及夹持反馈方法。
背景技术:
2.开椰机是一种用于对椰子进行切割加工开口的设备,通常有夹持部和切割部来进行;目前采用的开椰机,其夹持部大都简单设置夹具,由于椰子形状各异,夹持的可靠性难以准确进行反馈,夹持不稳定的情况下进行切割动作,轻则达不到想要的切割效果,重则容易损坏刀具,甚至会危及操作人员。
技术实现要素:
3.本发明要解决的技术问题在于,针对现有技术的上述缺陷,提供一种开椰机夹持座,还提供了一种开椰机,以及一种开椰机夹持反馈方法。
4.本发明解决其技术问题所采用的技术方案是:
5.构造一种开椰机夹持座,其特征在于,包括上夹持组件、下夹持组件、带动所述下夹持组件升降的升降组件,和控制器;所述上夹持组件包括由至少三个压持臂组合形成的对椰子上部定位的定位环、多个一一对应为所述压持臂提供纵向回弹力的第一弹性组件以及多个一一对应检测所述压持臂是否回弹到设定位置的第一传感器;所述下夹持组件包括均对应作用在椰子下部的相套设的柔性托座以及固定托座,还包括为所述柔性托座提供纵向回弹力的第二弹性组件、为所述固定托座提供纵向回弹力的第三弹性组件和由所述固定托座下行触发的第二传感器,所述第二传感器设置有多个且分布在所述固定托座的正下方;初始状态下,所述柔性托座的上端高度高于所述固定托座的上端高度;所述控制器在接收到所有的所述第一传感器的反馈信号以及任一所述第二传感器的被触发信号后判定完成夹持,否则判定为存在夹持错误。
6.本发明所述的开椰机夹持座,其中,所述固定托座呈环形,所述固定托座上设置有安装台阶,所述柔性托座通过所述第二弹性组件安装在所述安装台阶上。
7.本发明所述的开椰机夹持座,其中,所述下夹持件包括由所述升降组件带动升降的底板,多个所述第二传感器均设置在所述底板上。
8.本发明所述的开椰机夹持座,其中,所述底板上设置有安装槽,所述安装槽的底部设置有与所述底板的下表面连通的连通槽;所述第二传感器和所述第三弹性组件均设置在所述安装槽所在区域内。
9.本发明所述的开椰机夹持座,其中,所述固定托座的上端设置有多个齿口。
10.本发明所述的开椰机夹持座,其中,所述上夹持组件包括安装板,所述安装板上设置有供开椰刀具伸入的开槽;所述安装板的下表面设置有多个围绕所述开槽的安装所述压持臂的安装座。
11.本发明所述的开椰机夹持座,其中,所述压持臂的尾端与所述安装座转动连接,所
述安装座上设置有横向的限位杆,所述压持臂上设置有与所述限位杆配合的限位槽。
12.一种开椰机,其中,所述开椰机上设置有如上述的开椰机夹持座。
13.一种开椰机夹持反馈方法,应用如上述的开椰机夹持座,其中,包括以下步骤:
14.第一步:椰子放置在柔性托座上后,升降组件带动下夹持组件上行,椰子与一个或多个压持臂接触;
15.第二步:下夹持组件继续上行,压持臂受挤压回弹,回弹到设定位置的压持臂触发与其对应的第一传感器;
16.第三步:下夹持组件继续上行,压持臂到达回弹极限,第二弹性组件受压力被压缩,柔性托座相对固定托座下行,椰子与固定托座接触并由其支撑;
17.第四步:下夹持组件继续上行,固定托座受挤压触发第二传感器;
18.第五步:控制器统计接收到的第一传感器的反馈信号和接收到的第二传感器的被触发信号,在接收到所有的第一传感器的反馈信号以及任一第二传感器的被触发信号后判定完成夹持,否则判定为存在夹持错误。
19.本发明所述的开椰机夹持反馈方法,其中,所述开椰机夹持反馈方法还包括步骤:
20.第六步:控制器在判定存在夹持错误后控制升降组件带动下夹持组件下行复位,并重新执行第一步到第五步,当累积夹持错误次数达到设定数量值后进行报警。
21.本发明的有益效果在于:椰子放置在柔性托座上后,升降组件带动下夹持组件上行,椰子与一个或多个压持臂接触;下夹持组件继续上行,压持臂受挤压回弹,回弹到设定位置的压持臂触发与其对应的第一传感器;下夹持组件继续上行,压持臂到达回弹极限,第二弹性组件受压力被压缩,柔性托座相对固定托座下行,椰子与固定托座接触并由其支撑;下夹持组件继续上行,固定托座受挤压触发第二传感器;控制器统计接收到的第一传感器的反馈信号和接收到的第二传感器的被触发信号,在接收到所有的第一传感器的反馈信号以及任一第二传感器的被触发信号后判定完成夹持,否则判定为存在夹持错误;应用本技术的方式方法,能够对椰子进行可靠夹持,同时在夹持稳定性出现问题时能够准确的进行反馈,以及时处理,避免对后续切割带来影响。
附图说明
22.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将结合附图及实施例对本发明作进一步说明,下面描述中的附图仅仅是本发明的部分实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他附图:
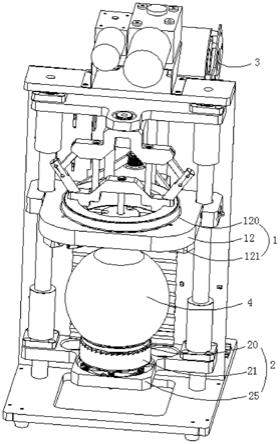
23.图1是本发明较佳实施例的开椰机夹持座结构示意图;
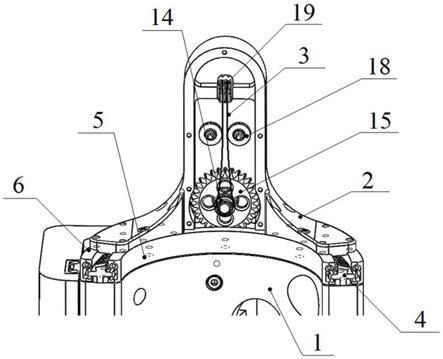
24.图2是本发明较佳实施例的开椰机夹持座另一角度结构示意图;
25.图3是本发明较佳实施例的开椰机夹持座柔性托座与固定托座连接示意图;
26.图4是本发明较佳实施例的开椰机夹持座压持臂安装结构示意图;
27.图5是本发明较佳实施例的开椰机夹持反馈方法流程图。
具体实施方式
28.为了使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例是本发明的部分实施例,而
不是全部实施例。基于本发明的实施例,本领域普通技术人员在没有付出创造性劳动的前提下所获得的所有其他实施例,都属于本发明的保护范围。
29.本发明较佳实施例的开椰机夹持座,如图1所示,同时参阅图2
‑
4,包括上夹持组件1、下夹持组件2、带动下夹持组件2升降的升降组件3,和控制器;上夹持组件1包括由至少三个压持臂10组合形成的对椰子上部定位的定位环、多个一一对应为压持臂10提供纵向回弹力的第一弹性组件(图中未显示)以及多个一一对应检测压持臂10是否回弹到设定位置的第一传感器11;下夹持组件2包括均对应作用在椰子下部的相套设的柔性托座20以及固定托座21,还包括为柔性托座20提供纵向回弹力的第二弹性组件22、为固定托座提21供纵向回弹力的第三弹性组件23和由固定托座21下行触发的第二传感器24,第二传感器24设置有多个且分布在固定托座21的正下方;初始状态下,柔性托座20的上端高度高于固定托座21的上端高度;控制器在接收到所有的第一传感器的反馈信号以及任一第二传感器的被触发信号后判定完成夹持,否则判定为存在夹持错误;
30.椰子4放置在柔性托座20上后,升降组件3带动下夹持组件2上行,椰子4与一个或多个压持臂10接触;下夹持组件2继续上行,压持臂10受挤压回弹,回弹到设定位置的压持臂10触发与其对应的第一传感器11;下夹持组件2继续上行,压持臂10到达回弹极限,第二弹性组件22受压力被压缩,柔性托座20相对固定托座21下行,椰子4与固定托座21接触并由其支撑;下夹持组件2继续上行,固定托座21受挤压触发第二传感器24;控制器统计接收到的第一传感器11的反馈信号和接收到的第二传感器24的被触发信号,在接收到所有的第一传感器11的反馈信号以及任一第二传感器24的被触发信号后判定完成夹持,否则判定为存在夹持错误;
31.应用本技术的方式方法,能够对椰子4进行可靠夹持,同时在夹持稳定性出现问题时能够准确的进行反馈,以及时处理,避免对后续切割带来影响;
32.需要说明的是,柔性托座20优选的设置呈环形,并有硅胶、橡胶等材料制成,椰子放置在其上时,能够进行一定自适应形变以保障尽量的贴合椰子表面,为椰子提供较可靠的静摩擦力;
33.而固定托座,较佳的可采用金属制成,以对椰子形成硬性支撑;椰子放置后通过先与柔性托座进行贴合适应,在柔性托座相对固定托座下行后再由固定托座来进行硬性的支撑,这样使得对椰子下部的支撑变得极为可靠;
34.较佳的,固定托座21的上端设置有多个齿口210,通过齿口的方式避免出现打滑情况,当然,齿口也可以等同替换为其他尖刺形式或者防滑纹路的形式,基于该种形式的简单替换均属于本技术保护范畴;
35.其中,升降组件采用现有的升降设备即可;
36.优选的,固定托座21呈环形,固定托座21上设置有安装台阶211,柔性托座20通过第二弹性组件22安装在安装台阶211上;结构合理且紧凑,装配方便;较佳的,柔性托座20设置在固定托座21的内部;
37.优选的,下夹持件2包括由升降组件带动升降的底板25,多个第二传感器24均设置在底板25上;底板25上设置有安装槽250,安装槽250的底部设置有与底板25的下表面连通的连通槽;第二传感器24和第三弹性组件23均设置在安装槽250所在区域内;整体性好,结构设置方便,且具有较佳的靠外界干扰能力;
38.较佳的,第二弹性组件22和第三弹性组件23优选的采用导柱上套设弹簧的结构形式,当然,也可以采用现有的其他弹性结构,例如氮气弹簧、优力胶块等等,基于该种原理的简单替换均属于本技术保护范畴。
39.优选的,上夹持组件1包括安装板12,安装板12上设置有供开椰刀具伸入的开槽120;安装板12的下表面设置有多个围绕开槽的安装压持臂10的安装座121;压持臂10的尾端与安装座121转动连接,安装座121上设置有横向的限位杆122,压持臂10上设置有与限位杆122配合的限位槽100;依靠限位杆和限位槽的配合作用来对压持臂的回弹进行限位,结构合理且紧凑,成本低且稳定性好;较佳的,第一弹性组件可以设置成扭簧,并设置在安装座与压持臂转动连接处,当然也可以是单独的弹簧等弹性件作用在压持臂上的方式,基于该种原理的简单替换均属于本技术保护范畴;
40.较佳的,第一传感器11安装在安装板上并位于压持臂10的一侧。
41.一种开椰机,其中,开椰机上设置有如上述的开椰机夹持座。
42.一种开椰机夹持反馈方法,应用如上述的开椰机夹持座,如图5所示,包括以下步骤:
43.s01:椰子放置在柔性托座上后,升降组件带动下夹持组件上行,椰子与一个或多个压持臂接触;
44.s02:下夹持组件继续上行,压持臂受挤压回弹,回弹到设定位置的压持臂触发与其对应的第一传感器;
45.s03:下夹持组件继续上行,压持臂到达回弹极限,第二弹性组件受压力被压缩,柔性托座相对固定托座下行,椰子与固定托座接触并由其支撑;
46.s04:下夹持组件继续上行,固定托座受挤压触发第二传感器;
47.s05:控制器统计接收到的第一传感器的反馈信号和接收到的第二传感器的被触发信号,在接收到所有的第一传感器的反馈信号以及任一第二传感器的被触发信号后判定完成夹持,否则判定为存在夹持错误;
48.s06:控制器在判定存在夹持错误后控制升降组件带动下夹持组件下行复位,并重新执行第一步到第五步,当累积夹持错误次数达到设定数量值后进行报警;
49.应用本技术的方式方法,能够对椰子进行可靠夹持,同时在夹持稳定性出现问题时能够准确的进行反馈,以及时处理,避免对后续切割带来影响。
50.应当理解的是,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,而所有这些改进和变换都应属于本发明所附权利要求的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。