1.本发明涉及机器人领域,特别是一种软体手套的运动角度与输入气压的模型建立方法。
背景技术:
2.软体机器人是一个快速发展的研究领域,它结合了机器人学、材料学和生命科学等相关领域的知识,其显著的特征是柔软性,可产生连续变形,具有无限自由度。国内外科研人员采用不同的驱动方式设计了各式各样的软体机器人。软体机器人的驱动方式是软体机器人研究的核心内容之一,国内外科研人员对此进行了大量的研究工作。目前常见的软体机器人的驱动方式大致可分(1)柔性流体驱动;(2)形状记忆合金驱动;(3)电活性聚合物驱动;(4)磁场驱动;(5)基于真空堵塞原理的半主动驱动。
3.软体手套与传统刚性手套相比,具有不可比拟的优势,如对易碎物品的抓握以及手体康复等。
4.在手体康复方面,刚性康复机器手辅助患者进行手部康复训练的形式有明显的优点,运动控制精准度较高,输出功率大,可以辅助患者的日常生活。同时问题也很明显,机械结构复杂,重量大,存在安全隐患,并且是为临床使用而设计的,具有不可移植性。适应性差,柔顺度不高。而软体康复手可以很好的适应人手的生理结构,能够根据手指的弯曲状态来调整自身形态,穿戴方便,舒适性,安全性较高,但目前的软体康复手也存在着一些问题。目前已有的软体康复手,由于多数采用的是单腔驱动器,只能辅助手指进行单一方向的屈曲运动,无法辅助进行复杂的运动。也有软体康复手能够实现复杂的运动,但是需要多个驱动器组合来实现,结构较为复杂。其次是大部分软体康复手所采用的软体驱动器,由于其固有的柔顺性,刚度较低,无法在较低的气压下产生足够的抓取力,无法辅助正常的日常生活。
5.在对易碎物品的抓握方面,对抓握力的精确控制,也非常重要,另外,物品形状各异,如何实现软体手套运动角度的精确控制,从而实现各种规格物品的准确抓取,也变得尤为迫切。
技术实现要素:
6.本发明要解决的技术问题是针对上述现有技术的不足,而提供一种软体手套的运动角度与输入气压的模型建立方法,该软体手套的运动角度与输入气压的模型建立方法能够建立弯曲角度、偏转角度和输入气压之间的关系,并通过调整纤维增强层中螺旋纤维的螺旋匝数n,从而能够有效抑制驱动器的径向膨胀。进一步,通过对变刚度堵塞机构中小球颗粒进行静力学分析,建立末端抓握输出力与抽真空压力之间的模型关系式。
7.为解决上述技术问题,本发明采用的技术方案是:
8.软体手套的运动角度与输入气压的模型建立方法,包括如下步骤。
9.步骤1、制作软体手套:在软体手套的每根指套的指背内各插设一个软体驱动器;
每个软体驱动器均包括从内至外依次同轴布设的堵塞变刚度机构、内柔性骨架(也称气动结构)和硅胶纤维复合层;内柔性骨架中沿周向均匀布设有三个气腔,分别为气腔a、气腔b和气腔c;硅胶纤维复合层包括环形硅胶和内置在环形硅胶中的螺旋纤维,螺旋纤维的螺旋走向与软体驱动器的中心轴线呈锐形夹角;软体手套的运动角度包括单气腔充气时弯曲角度和多气腔充气时的扭转角度。
10.步骤2、软体驱动器弯曲:气腔a充气,且充气气压为p,气腔a连同软体驱动器向着堵塞变刚度机构的方向发生弯曲变形,且弯曲角度为θ。
11.步骤3、求解和变形后,气动结构的半径为r,气腔a的半径为r,r和r同时对θ进行求导,得到:
[0012][0013]
其中:
[0014][0015]
式中:l0为气腔a变形前的中轴线长度;n为螺旋纤维的螺旋匝数;w0为螺旋纤维的总长度。
[0016]
e1为气腔a中心到气动结构中心的距离;e2为堵塞变刚度机构的最大外径。
[0017]
r0为气动结构变形前的半径;r0为气腔a变形前的半径;r为气腔a变形后的半径;
[0018]
步骤4、求解充气气压p对气腔a所做的功为w,则w对θ进行求导,得到:
[0019][0020]
其中:
[0021]
[0022][0023][0024][0025][0026]
式中:l为气腔a变形后的中轴线长度;t
10
、t
20
、t
30
和t
40
分别为气腔a变形前与其四周边界的距离;t1、t2、t3和t4分别为气腔a变形后与其四周边界的距离;l为变形后气动结构中轴线的长度;c1和c2均为内柔性骨架的材料应变能密度参数,为已知量;
[0027]
步骤5、建立单气腔充气时弯曲角度θ与输入气压p的关系模型,具体为:
[0028][0029]
步骤6、建立多气腔充气时的扭转角度φ与输入气压的关系模型,具体为:
[0030][0031]
式中,p1、p2和p3分别为气腔a、气腔b和气腔c对应的输入气压。
[0032]
软体手套的运动角度还包括多气腔充气时的弯曲角度;还包括步骤7,建立多气腔充气时的弯曲角度θ与输入气压的关系模型,具体为:
[0033][0034]
还包括步骤8、抓握:根据步骤5至步骤7建立的运动角度与输入气压的关系模型,通过控制气动结构中三个气腔的输入气压,进而控制软体手套的运动角度;当达到设定的运动角度后,堵塞变刚度机构中抽真空,堵塞变刚度机构的刚度增加,软体驱动器能实现抓握功能。
[0035]
步骤8中,通过控制堵塞变刚度机构中的抽真空压力p
真
,进而控制软体驱动器的抓握输出力f。
[0036]
抓握输出力f与抽真空压力p
真
具有如下关系模型:
[0037][0038]
式中,μ
f
为堵塞变刚度机构中小球颗粒之间的滑动摩擦系数。
[0039]
还包括步骤9,螺旋匝数研究:通过增加螺旋纤维的螺旋匝数n,进而限制软体驱动器的径向膨胀。
[0040]
螺旋匝数n不小于20。
[0041]
n>45。
[0042]
本发明具有如下有益效果:
[0043]
(1)对纤维增强式气动结构进行形变分析,通过yeoh模型和虚功原理对单腔输入情况建立弯曲角度和输入气压之间的关系。通过确定的气压
‑
角度关系,使软体执行器具有较高的运动控制精准度,可以完成抓握动作;同时,通过调节气压输入值,使软体驱动器达到理想的角度,克服单一气压下单一弯曲角度的不足,可以完成不同尺寸物体的抓握动作。
[0044]
(2)为适应人手的生理结构和生活习惯,通过将气腔充气变形等效为绳线的长度变化对多腔输入情况进行建模,建立起了偏转角度和输入气压之间的关系。克服单一模式下软体康复手套只能做弯曲运动,不能做扭转运动的缺点,实现康复手套带动患者手部同时弯曲、扭转的多模式运动,并产生显著的伸展扭矩,为受痉挛影响的患者提供足够的伸展扭矩。
[0045]
(3)对驱动器节段加压前后的几何模型进行分析,证明了高匝数的纤维增强层能够有效抑制驱动器的径向膨胀。气动结构的纤维增强层采用双螺旋对称缠绕的纤维线的形式,能够达到限制径向膨胀,延长驱动器的使用寿命,有效提高弯曲效率的目的。
[0046]
(4)对小颗粒堵塞结构进行了静力学分析,建立末端输出力与真空压力之间的数学关系式。通过确定的数学关系,改变真空压力,调节末端输出力,使康复手套产生足够的力和力矩,保证有充足的力和运动传递给手指,从而带动手指完成相应的康复动作,得到充分的康复锻炼。
附图说明
[0047]
图1显示了变形前气动结构的尺寸示意图。
[0048]
图2显示了变形后气动结构的尺寸示意图。
[0049]
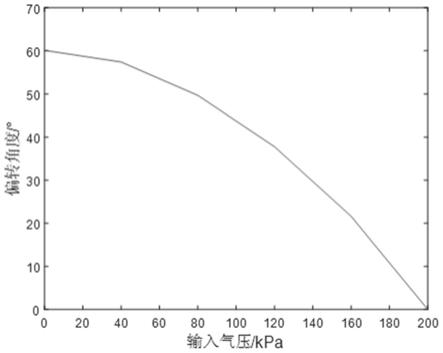
图3显示了扭转角度与输入气压的关系曲线图。
具体实施方式
[0050]
下面结合附图和具体较佳实施方式对本发明作进一步详细的说明。
[0051]
本发明的描述中,需要理解的是,术语“左侧”、“右侧”、“上部”、“下部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,“第
一”、“第二”等并不表示零部件的重要程度,因此不能理解为对本发明的限制。本实施例中采用的具体尺寸只是为了举例说明技术方案,并不限制本发明的保护范围。
[0052]
软体手套的运动角度与输入气压的模型建立方法,包括如下步骤。
[0053]
步骤1、制作软体手套:在软体手套的每根指套的指背内各插设一个软体驱动器。
[0054]
上述软体驱动器为现有技术,具体结构参照申请人之前申报的公开号为cn107756385b,发明名称为“基于堵塞机理的变刚度软体驱动器、软体手臂和软体平台”中的“单元模块”。
[0055]
每个软体驱动器均包括从内至外依次同轴布设的堵塞变刚度机构、内柔性骨架和硅胶纤维复合层。硅胶纤维复合层也即外柔性层和包裹层的混合,但本技术进一步做了改进,具体包括环形硅胶和内置在环形硅胶中的螺旋纤维,螺旋纤维的螺旋走向与软体驱动器的中心轴线呈锐形夹角。
[0056]
气动结构沿周向均匀布设有三个气腔,分别为气腔a、气腔b和气腔c。三个气腔与软体驱动器中心的距离相等,均为e1,在任意一个或多个气腔变形前后,默认e1不发生变化。
[0057]
堵塞变刚度机构包括支撑骨架、大球颗粒和小球颗粒,具体结构参见cn107756385b,堵塞变刚度机构的最大外径(也即支撑骨架的直径)为e2,在气腔变形前后,不发生变化。
[0058]
上述e1和e2为设计值,e1增加,弯曲角度减少,故而e1对弯曲性有抑制作用。e2越大,在同样的气压输入下,弯曲角度越大。本技术中,优选e1=6mm,e2=2mm。
[0059]
软体手套的运动角度包括单气腔充气时弯曲角度、多气腔充气时的扭转角度和多气腔充气时的弯曲角度。
[0060]
步骤2、软体驱动器弯曲:气腔a充气,且充气气压为p,气腔a连同软体驱动器向着堵塞变刚度机构的方向发生弯曲变形,且弯曲角度为θ。
[0061]
步骤3、求解和变形后,气动结构的半径为r,气腔a的半径为r,r和r同时对θ进行求导,得到:
[0062][0063]
其中:
[0064][0065]
式中:l0为气腔a变形前的中轴线长度;n为螺旋纤维的螺旋匝数;w0为螺旋纤维的总长度。
[0066]
r0为气动结构变形前的半径;r0为气腔a变形前的半径;r为气腔a变形后的半径。
[0067]
步骤4、求解充气气压p对气腔a所做的功为w,则w对θ进行求导,得到:
[0068][0069]
其中:
[0070][0071][0072][0073][0074][0075]
式中:l为气腔a变形后的中轴线长度。
[0076]
t
10
、t
20
、t
30
和t
40
分别为气腔a变形前与其四周边界的距离,具体如图1所示。
[0077]
t1、t2、t3和t4分别为气腔a变形后与其四周边界的距离,具体如图2所示。
[0078]
l为变形后软体驱动器中轴线的长度。
[0079]
c1和c2均为内柔性骨架的材料应变能密度参数,为已知量。
[0080]
步骤5、建立单气腔充气时弯曲角度θ与输入气压p的关系模型,具体为:
[0081][0082]
本发明通过对纤维增强式气动结构进行形变分析,通过yeoh模型和虚功原理对单腔输入情况建立弯曲角度和输入气压之间的关系。通过确定的气压
‑
角度关系,使软体执行器具有较高的运动控制精准度,可以完成抓握动作;同时,通过调节气压输入值,使软体驱动器达到理想的角度,克服单一气压下单一弯曲角度的不足,可以完成不同尺寸物体的抓握动作。
[0083]
步骤6、建立多气腔充气时的扭转角度φ与输入气压的关系模型,具体为:
[0084][0085]
式中,p1、p2和p3分别为气腔a、气腔b和气腔c对应的输入气压,上述扭转角度φ与输入气压的关系模型,对应的曲线图如图3所示。
[0086]
本发明为适应人手的生理结构和生活习惯,通过将气腔充气变形等效为绳线的长度变化对多腔输入情况进行建模,建立起了偏转角度和输入气压之间的关系。克服单一模式下软体康复手套只能做弯曲运动,不能做扭转运动的缺点,实现康复手套带动患者手部同时弯曲、扭转的多模式运动,并产生显著的伸展扭矩,为受痉挛影响的患者提供足够的伸展扭矩。
[0087]
步骤7,建立多气腔充气时的弯曲角度θ与输入气压的关系模型,具体为:
[0088][0089]
步骤8、抓握:根据步骤5至步骤7建立的运动角度与输入气压的关系模型,通过控制气动结构中三个气腔的输入气压,进而控制软体手套的运动角度;当达到设定的运动角度后,堵塞变刚度机构中抽真空,堵塞变刚度机构的刚度增加,软体驱动器能实现抓握功能。
[0090]
对小颗粒堵塞结构进行了静力学分析,建立末端输出力(也即抓握输出力f)与真空压力(也即抽真空压力p
真
)之间的数学关系式。通过确定的数学关系,改变真空压力,调节末端输出力,使康复手套产生足够的力和力矩,保证有充足的力和运动传递给手指,从而带动手指完成相应的康复动作,得到充分的康复锻炼。
[0091]
上述抓握输出力f与抽真空压力p
真
具有如下关系模型:
[0092][0093]
式中,μ
f
为堵塞变刚度机构中小球颗粒之间的滑动摩擦系数。
[0094]
步骤9,螺旋匝数研究:通过增加螺旋纤维的螺旋匝数n,进而限制软体驱动器的径向膨胀。本发明通过对驱动器节段加压前后的几何模型进行分析,证明了高匝数的纤维增强层能够有效抑制驱动器的径向膨胀。气动结构的纤维增强层采用双螺旋对称缠绕的纤维线的形式,能够达到限制径向膨胀,延长驱动器的使用寿命,有效提高弯曲效率的目的。
[0095]
螺旋匝数n不小于20,进一步,优选n>45,本实施例中优选取值为n=50。
[0096]
以上详细描述了本发明的优选实施方式,但是,本发明并不限于上述实施方式中的具体细节,在本发明的技术构思范围内,可以对本发明的技术方案进行多种等同变换,这些等同变换均属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。