用于使包含热塑性聚合物的长形元件成形的装置、组件、套件、系统和方法
发明领域
1.本发明涉及用于使长形元件弯曲的装置的领域,并且更具体地,涉及用于使包含热塑性聚合物的长形元件弯曲的装置。
2.发明背景
3.包含热塑性聚合物的长形元件必须被加热以便成形。已加热的长形元件的成形可能会不期望地使长形元件在成形区域中的横截面轮廓变形。
4.发明概述
5.本发明的一些实施例可以提供一种用于在长形矫形植入物(elongated orthopedic implant)的成形期间保持长形矫形植入物的横向横截面轮廓的形状的装置,该装置可以包括:沿着该装置的纵向轴线相邻布置并且彼此螺旋连接的多个线圈,其中线圈适于环绕并紧密支撑长形矫形植入物的至少一部分,并且在长形矫形植入物成形时可从长形矫形植入物可展开地(unwindably)移除。
6.在一些实施例中,线圈被成形和设定尺寸成确保在长形矫形植入物弯曲时形成在装置的凸侧上的相邻线圈之间的间隙不超过预定的间隙阈值。
7.在一些实施例中,线圈由具有矩形横截面的金属线制成,其中矩形横截面具有沿着装置的纵向轴线的第一尺寸和垂直于第一尺寸的第二尺寸。
8.在一些实施例中,第一尺寸的范围在0.1mm
‑
3.0mm之间。
9.在一些实施例中,第二尺寸的范围在0.05mm
‑
0.3mm之间。
10.在一些实施例中,预定的间隙阈值不超过0.5mm。
11.在一些实施例中,线圈由弹性材料制成,从而能够实现以下项中的至少一个:线圈相对于彼此沿着与装置的纵向轴线和垂直于装置的纵向轴线的轴线中的至少一个轴线平行的方向的期望的相对运动量,以及线圈在垂直于装置的纵向轴线的方向上的期望的形变量。
12.在一些实施例中,装置的横向横截面的尺寸小于待与装置一起使用的长形矫形植入物的横向横截面轮廓的尺寸。
13.在一些实施例中,装置可以包括:适于将装置的第一端部可移除地附连到长形矫形植入物的第一止动件(stopper),以及适于将装置的第二端部可移除地附连到长形矫形植入物的第二止动件,其中装置的第一端部和第二端部到长形矫形植入物的附连防止在长形矫形植入物的成形期间装置的不期望的卷绕(winding)和展开(unwinding)以及轴向滑动中的至少一种。
14.本发明的一些实施例可以提供一种用于保持长形矫形植入物的横向横截面轮廓的形状的组件,该组件可以包括:如上文描述的第一装置,其中第一装置适于环绕并紧密支撑长形矫形植入物的至少一部分;以及如上文描述的第二装置,其中第二装置适于环绕并紧密支撑第一装置的至少一部分,使得第二装置的线圈与第一装置的线圈之间的接触区域重叠。
15.本发明的一些实施例可以提供一种用于保持长形矫形植入物的横向横截面轮廓的形状的组件,该组件可以包括:如上文描述的装置,以及封套(envelope),该封套由弹性材料制成并适于容纳该装置和长形矫形植入物。
16.在一些实施例中,封套可以包括适于紧密环绕装置的管。
17.在一些实施例中,管可以在其外表面上并且沿着其长度的至少一部分包括凹痕(indent)。
18.在一些实施例中,封套可以包括波纹管,其中在长形矫形植入物插入到波纹管内的搁置位置(rest place)时,波纹管覆盖长形矫形植入物的至少一部分。
19.在一些实施例中,封套可以包括适于封闭波纹管的第一端部的盖,其中波纹管的第二端部是封闭端部,其中盖可以包括第一盖部分和可拧到第一盖部分上的第二盖部分。
20.在一些实施例中,封套可以包括:适于封闭波纹管的第一端部的第一盖,其中第一盖可以包括近侧第一盖部分和可拧到近侧第一盖部分上的远侧第一盖部分;以及适于封闭波纹管的第二端部的第二盖。
21.本发明的一些实施例可以提供一种用于使长形组件弯曲的装置,该装置可以包括:壳体,以及多个弯曲单元,该多个弯曲单元部分地设置在壳体内,彼此相距一定距离,其中多个弯曲单元中的每一个可以包括:适于接纳长形组件的一部分的接纳构件,该接纳构件在初始位置和至少一个其他位置之间是可移动的,以及适于移动接纳构件的驱动组件,其中当多个弯曲单元的接纳构件处于其各自的初始位置时,多个弯曲单元的接纳构件在参考平面中并且沿着参考纵向轴线对齐,并且可在以下方向中的至少一个方向上移动:平行于参考平面的第一方向和垂直于第一方向的第二方向。
22.在一些实施例中,长形组件可以包括以下中的至少一个:至少部分地被横向横截面轮廓保持装置环绕的长形矫形植入物,以及对至少部分地被横向横截面轮廓保持装置环绕的长形矫形植入物的至少一部分进行包封的封套。
23.在一些实施例中,横向横截面轮廓保持装置可以包括:多个线圈,该多个线圈沿着装置的纵向轴线相邻布置并且彼此螺旋连接,其中线圈适于环绕并紧密支撑长形矫形植入物的至少一部分,并且在长形矫形植入物成形时可从长形矫形植入物可展开地移除。
24.在一些实施例中,封套可以包括波纹管,当长形矫形植入物插入到波纹管内的搁置位置时,波纹管覆盖长形矫形植入物的至少一部分。
25.在一些实施例中,封套可以包括适于封闭波纹管的第一端部的盖,并且其中波纹管的第二端部是封闭端部,盖可以包括第一盖部分和可拧到第一盖部分上的第二盖部分。
26.在一些实施例中,封套可以包括:适于封闭波纹管的第一端部的第一盖,其中第一盖可以包括近侧第一盖部分和可拧到近侧第一盖部分上的远侧第一盖部分,以及适于封闭波纹管的第二端部的第二盖。
27.在一些实施例中,接纳构件中的每一个可围绕其中心轴线旋转。
28.在一些实施例中,弯曲单元中的每一个可以包括:可在初始移动器位置和至少一个其他移动器位置之间移动的移动器,其中移动器的位置限定了相应弯曲单元的接纳构件的移动量。
29.在一些实施例中,弯曲单元中的每一个的驱动组件可以包括:第一轨道,该第一轨道在其端部处在平行于参考平面的平面中联接到壳体,其中相应弯曲单元的接纳构件可滑
动地联接到第一轨道;可旋转臂,该可旋转臂在其第一端部处枢转地联接到相应弯曲单元的接纳构件的端部;致动臂,该致动臂在其第一端部处枢转地联接到可旋转臂的第二端部,第二臂可在平行于参考平面的平面中在初始位置和延伸位置之间移动;第二轨道,该第二轨道在其端部处联接到壳体,当致动臂处于延伸位置时,第二轨道平行于可旋转臂,其中相应弯曲单元的移动器可滑动地联接到第二轨道;以及旋转轴线臂,该旋转轴线臂在其第一端部处联接到相应弯曲单元的移动器,并且在其第二端部处可移动地联接到可旋转臂,其中由相应弯曲单元的移动器的位置指示的旋转轴线臂的第二端部的位置限定旋转轴线,旋转臂在致动时绕该旋转轴线旋转,并因此限定相应弯曲单元的接纳构件的移动量,其中驱动组件的致动臂在延伸位置和初始位置之间的移动使可旋转臂的第二端部移动,从而围绕由旋转轴线臂的第二端部限定的旋转轴线旋转可旋转臂,并且沿着第一轨道在接纳构件的初始位置和至少一个另外的位置中的一个位置之间移动相应弯曲单元的接纳构件。
30.在一些实施例中,弯曲单元的驱动组件的致动臂的第二端部使用致动杆连接,使得致动杆的移动造成弯曲单元的驱动组件的致动臂的同时移动。
31.在一些实施例中,弯曲单元中的每一个可以包括可旋转杆,该可旋转杆在其端部处在平行于参考平面的平面中可旋转地联接到壳体,其中相应弯曲单元的接纳构件可移动地联接到杆并且适于在杆旋转时沿着杆移动,并且每个弯曲单元的驱动组件可以包括马达和传动子单元,该传动子单元用于将由马达产生的旋转运动传递到可旋转杆,从而在接纳构件的初始位置和至少一个另外的位置中的一个位置之间移动相应弯曲单元的接纳构件。
32.在一些实施例中,至少弯曲单元的接纳构件可以可移除地联接到弯曲单元的驱动组件。
33.在一些实施例中,该装置可以包括控制器,该控制器被构造成:接收长形组件的期望的弯曲轮廓,并控制弯曲单元的驱动组件的操作,以根据升高组件的期望的弯曲轮廓来移动弯曲单元的接纳构件。
34.本发明的一些实施例可以提供一种用于加热长形组件的装置,该装置可以包括:壳体,该壳体具有适于接纳长形组件的内部;以及两个或更多个加热元件,这些加热元件沿着壳体的至少一部分至少部分地包封壳体。
35.在一些实施例中,该装置可以包括适于接纳长形组件并适于定位在壳体的内部的加热封套。
36.在一些实施例中,两个或更多个加热元件是电池供电的。
37.本发明的一些实施例可以提供一种用于加热长形组件并使长形组件弯曲的系统,该系统可以包括:如上文描述的用于加热长形组件的装置,以及如上文描述的用于使长形组件弯曲的装置。
38.本发明的一些实施例可以提供一种使长形组件弯曲的方法,该方法可以包括:提供长形组件,该长形组件可以包括至少部分地被横向横截面轮廓保持装置环绕的长形矫形植入物;使用加热装置加热长形组件以提供已加热的长形组件;根据长形矫形植入物的期望的弯曲轮廓构造弯曲装置;通过弯曲装置来弯曲已加热的长形组件,以提供已弯曲的长形组件,该已弯曲的长形组件包括具有期望的弯曲轮廓的已弯曲的长形矫形植入物;冷却已弯曲的长形组件,并从已弯曲的长形矫形植入物中释放横向横截面轮廓保持装置。
39.在一些实施例中,长形组件、加热装置和弯曲装置是无菌的。
40.在一些实施例中,加热装置和弯曲装置中的至少一个不是无菌的,并且其中长形组件可以包括封套,该封套至少部分地包封无菌长形矫形植入物,该无菌长形矫形植入物至少部分地被无菌横向横截面轮廓保持装置环绕。
41.在一些实施例中,横向横截面轮廓保持装置可以包括:多个线圈,该多个线圈沿着装置的纵向轴线相邻布置并且彼此螺旋连接,其中线圈适于环绕并紧密支撑长形矫形植入物的至少一部分,并且在长形矫形植入物成形时可从长形矫形植入物可展开地移除。
42.在一些实施例中,封套可以包括波纹管,其中波纹管在长形矫形植入物插入到波纹管内的搁置位置时覆盖长形矫形植入物的至少一部分。
43.在一些实施例中,封套可以包括适于封闭波纹管的第一端部的盖,并且其中波纹管的第二端部是封闭端部,其中该盖可以包括第一盖部分和可拧到第一盖部分上的第二盖部分。
44.在一些实施例中,封套可以包括:适于封闭波纹管的第一端部的第一盖,其中第一盖可以包括近侧第一盖部分和可拧到近侧第一盖部分上的远侧第一盖部分,以及适于封闭波纹管的第二端部的第二盖。
45.本发明的这些、另外的和/或其他的方面和/或优点在下面的详细描述中阐述、可以从详细描述中推断出来、和/或可通过实践本发明而获知。
46.附图简述
47.为了更好地理解本发明的实施例并示出如何可实现本发明的实施例,现在将纯粹通过示例的方式参考附图,在附图中相同的数字始终指示相应的元件或部分。
48.在附图中:
49.图1a、图1b、图1c、图1d和图1e是根据本发明的一些实施例的用于保持长形元件的横向横截面轮廓的形状的装置的示意图;
50.图2a、图2b、图2c、图2d、图2e和图2f是根据本发明的一些实施例的用于保持长形元件的横向横截面轮廓的形状的装置的构件的各种构型的示意图;
51.图3a和图3b是根据本发明的一些实施例的用于保持长形元件的横向横截面轮廓的形状的盘绕(coiled)装置的示意图;
52.图3c和图3d是根据本发明的一些实施例的组件的示意图,该组件包括用于保持长形元件的横向横截面轮廓的形状的两个盘绕装置;
53.图4a、图4b和图4c是根据本发明的一些实施例的组件的示意图,该组件包括用于保持长形元件的横向横截面轮廓的形状的装置以及封套;
54.图5是根据本发明的一些实施例的用于加热长形组件的加热装置的示意图;
55.图6a、图6b和图6c是根据本发明的一些实施例的用于使长形组件弯曲的弯曲装置的示意图;
56.图7a、图7b、图7c、图7d和图7e是根据本发明的一些实施例的用于使长形组件弯曲的弯曲装置的示意图,并且该弯曲装置包括具有机械可调节的驱动组件的弯曲单元;
57.图8a是根据本发明的一些实施例的用于使长形组件弯曲的弯曲装置的示意图,该弯曲装置具有带有机动驱动组件的弯曲单元;
58.图8b、图8c、图8d和图8e是根据本发明的一些实施例的用于使长形组件弯曲的弯曲装置的单个机动弯曲单元的示意图;
59.图9a和图9b是根据本发明的一些实施例的能够提供长形组件的三维弯曲的弯曲装置的示意图;
60.图10a是根据本发明的一些实施例的用于使长形组件弯曲的系统的方框图;
61.图10b和图10c是根据本发明的一些实施例的加热装置和弯曲装置的联接的各种构型的示意图;
62.图11是根据本发明的一些实施例的用于确定长形元件的期望的弯曲轮廓的装置的示意图;以及
63.图12是根据本发明的一些实施例的使长形组件弯曲的方法的流程图。
64.应当理解,为了图示的简单和清楚起见,附图中所示的元件不一定按比例绘制。例如,为了清楚,一些元件的尺寸可能相对于其他元件被放大。此外,在认为适当的情况下,参考数字可以在附图中被重复以指示相应的或类似的元件。
65.发明的详细描述
66.在以下描述中,描述了本发明的各个方面。出于解释的目的,阐述了具体的构型和细节以便提供对本发明的透彻理解。然而,对于本领域技术人员来说还将明显的是,本发明可以在没有本文给出的具体的细节的情况下实践。此外,为了不使本发明模糊,众所周知的特征可能已经被省略或简化。具体参考附图,要强调的是,所示的细节仅为示例性的,并且仅出于对本发明的说明性讨论的目的,并且为了提供被认为最有用且易于理解本发明的原理和概念方面的描述而呈现。在这方面,未试图比对本发明的基本理解所必需的细节更详细地示出本发明的结构细节,结合附图进行的描述使得如何可以在实践中实施本发明的若干形式对于本领域技术人员而言是明显的。
67.应当理解,在详细解释本发明的至少一个实施例之前,本发明在其应用方面不限于以下描述中阐述的或附图中图示的构造的细节和部件的布置。本发明适用于可以以各种方式实践或实施的其他实施例以及所公开的实施例的组合。同样,应当理解,本文采用的措词和术语是出于描述的目的,而不应被认为具有限制性。
68.应当理解,除非另有特别陈述,否则根据以下讨论明显的是,在整个说明书中,使用诸如“处理”、“运算”、“计算”、“确定”、“增强”此类的术语的讨论涉及计算机或运算系统或类似电子运算装置的操作和/或过程,该计算机或运算系统或类似的电子运算装置将在运算系统的寄存器和/或存储器内被表示为物理(诸如电子)量的数据操纵和/或变换为在运算系统的存储器、寄存器或其他这样的信息存储、传输或显示装置内类似地被表示为物理量的其他数据。所公开的模块或单元中的任何一个可以至少部分地通过计算机处理器来实现。
69.总体上,公开了用于使长形元件成形的装置、系统、套件和方法。
70.下文中使用的术语“长形元件”涉及包含一种或更多种热塑性聚合物的任何长形物体。例如,长形元件可以包含聚醚醚酮(peek)聚合物。在另一个示例中,长形元件可以包含大约60%的碳和大约40%的peek聚合物。
71.在一些实施例中,长形元件是矫形植入物。例如,长形元件可以是来自包括以下项的列表中的任何一个:矫形杆(例如,用于椎弓根螺钉(pedicle screw)组件)、矫形板(例如,股骨板、肱骨板等)、k线、矫形钉(例如,肱骨钉、脑髓(cephalomedullary)钉等),等等。
72.包含热塑性聚合物的长形元件应该被加热或预加热以便成形。长形元件的成形可
以是旨在改变长形元件的初始形状的任何机械动作。例如,成形可以包括长形元件的弯曲、扭曲、拉伸和/或压缩中的任一种或其组合。下文的描述提供了弯曲作为成形的示例。应当注意,下文描述的装置、系统、套件和方法也可以用于其他类型或成形(例如,诸如扭曲、拉伸和/或压缩)的组合。
73.例如,已加热的长形元件的成形可以例如在成形区域中使长形元件的横截面轮廓变形。例如,当具有初始圆形横截面的已加热的长形元件(例如,杆)被弯曲时,弯曲区域中的长形元件的横截面轮廓可能变形,并且可能从圆形变为例如卵形或椭圆形。
74.所公开的装置、系统、套件和方法可以使包含热塑性聚合物的长形元件能够成形,同时防止成形区域中横截面轮廓的形状变形。此外,所公开的装置和系统可以位于手术室中,并且可以在手术程序期间使其长形元件能够在手术室中成形。
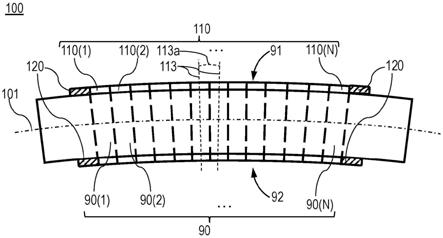
75.现在参考图1a、图1b、图1c、图1d和图1e,这些图是根据本发明的一些实施例的用于保持长形元件90的横向横截面轮廓的形状的装置100的示意图。
76.根据一些实施例,装置100包括多个构件110(例如,如图1a、图1b、图1c、图1d和图1e所示)。构件110可以沿着装置100的纵向轴线101布置。构件110可以彼此相邻(例如,可以彼此接触)。构件110可以沿着纵向轴线101以能够实现构件110相对于彼此的期望的相对运动量(例如,横向运动、纵向运动和/或成角度的运动)的方式布置。
77.多个构件110中的每一个可以包括外围构件部分112,该外围构件部分112可以至少部分地环绕相应构件110的中心构件开口114(例如,如图1a所示)。
78.根据各种实施例,构件110可以螺纹连接到长形元件90上,或者长形元件90可以通过构件110的中心构件开口114插入,使得每个构件110环绕并紧密支撑长形元件90的相应部分(例如,如由图1b中的虚线箭头所指示的)。
79.例如,第一构件110(1)可以接纳并紧密支撑长形元件90的第一部分90(1),第二构件110(2)可以接纳并紧密支撑长形元件90的第二部分90(2),和/或第n构件110(n)可以接纳并紧密支撑长形元件90的第n部分90(n)(例如,如图1c所示)。
80.构件110和/或构件110的外围构件部分112和/或构件110的中心构件开口114的形状和尺寸可以与例如长形元件90的相应部分的横截面轮廓的形状和尺寸相匹配,以在其中提供长形元件90的紧密接纳和支撑。
81.根据一些实施例,支撑在装置100内的长形元件90被加热(或预加热),使得长形元件90的温度升高到预定的温度值(例如,如下文关于图5所描述的)。在一些实施例中,预定的温度值为380℃。装置100的构件110可以由在其预定的温度值下不经历热形变的材料制成。构件110可以由生物相容的(biocompatible)材料制成。例如,构件110可以由不锈钢或钛制成。
82.根据一些实施例,装置100能够使长形元件90弯曲,同时防止弯曲区域中长形元件90的横截面轮廓的变形/改变。
83.当将弯曲力施加到支撑在装置100内的长形元件90时,构件110可以相对于彼此移动(例如,通过彼此变得更远或更近,或者通过改变两个相邻构件的平面113之间的相对角度113a),同时相对于长形元件90的相应部分保持不可移动(或基本上不可移动)(例如,如上描述的由于其紧密支撑所导致),从而允许长形元件90弯曲(例如,如图1d所示)。构件110在弯曲期间不形变(或者基本上不形变)(因为构件110可以相对于彼此移动并且不经历热
形变),从而防止长形元件90的相应部分的横截面轮廓变形,并且由此沿着整个弯曲区域保持(或者基本上保持)长形元件90的横截面轮廓的形状。
84.根据一些实施例,装置100包括一个或更多个止动件120(例如,如图1c和图1d所示)。止动件120可以例如将第一构件110(1)和第n构件110(n)附连在装置100的两个端部处,以便例如进一步将第一构件110(1)和第n构件110(n)固定在其各自的位置,并且例如在长形元件90弯曲期间防止装置的构件滑动。
85.当支撑在装置100内的长形装置90弯曲时,间隙94可以在已弯曲的长形元件90的凸侧91上形成在相邻构件110之间,而在已弯曲的长形元件90的凹侧92上,构件110可保持相对于彼此相邻(或基本上相邻)(例如,如图1e所示)。例如,长形元件90的凹侧92上的间隙96可以比凸侧91上的间隙94小至少一个数量级。
86.根据一些实施例,构件110被成形为确保形成在已弯曲的长形元件90的凸侧91上的相邻构件110之间的间隙94不超过预定的间隙阈值。
87.在一些实施例中,构件110/构件110的外围部分112由具有矩形(或基本上矩形)横截面(例如,如图1c、图1d和图1e所示)的金属线(例如,不锈钢或钛)制成。构件110的外围部分112的矩形横截面可以具有第一尺寸112a(例如,在沿着或基本上沿着装置100的纵向轴线101的方向上)和垂直于第一尺寸112a的第二尺寸112b(例如,如图1e所示)。
88.在一些实施例中,构件110的外围部分112的横截面的第一尺寸112a的范围在0.1mm
‑
3.0mm之间。在一些实施例中,构件110的外围部分112的横截面的第二尺寸112b的范围在0.05mm
‑
0.3mm之间。
89.在一些实施例中,预定的间隙阈值不超过0.05mm。在一些实施例中,预定的间隙阈值不超过0.5mm。
90.当完成长形元件90的弯曲时,可以从长形元件90释放(例如,可滑动地移除)装置100。
91.现在参考图2a、图2b、图2c、图2d、图2e和图2f,这些图是根据本发明的一些实施例的用于保持长形元件90的横向横截面轮廓形状的装置100的构件110的各种构型的示意图。
92.根据一些实施例,构件110的外围构件部分112的第一尺寸112a越小,在长形元件90弯曲时,在长形元件90的凸侧91上在相邻构件110之间形成的间隙94越小。
93.例如,图2a
‑
图2f示出了作为长形元件90的示例的杆,该杆具有6mm的直径97,被支撑在装置100内,并且被弯曲以在弯曲区域中提供45mm的曲率半径98。
94.应当注意,在极端情况下,例如在矫形手术期间,可能需要这样小的曲率半径98(例如,45mm)。例如,这种情况可以包括调节例如椎弓根螺钉组件的长形元件90(例如杆),以适配其l5
‑
s1脊柱节段之间的脊髓的曲率。
95.图2a、图2b、图2c、图2d、图2e和图2f进一步示出了装置100的各种构型的示例,其中构件110具有外围构件部分112,例如,该外围构件部分112具有分别为2.0mm、1.4mm、1.0mm、0.8mm、0.6mm和0.4mm的第一尺寸112a,这在长形元件90(当其弯曲时)的凸侧91上提供分别为0.31mm、0.21mm、0.15mm、0.12mm、0.09mm和0.06mm的间隙94。应当注意,图2a
‑
图2f仅为清楚起见示出了长形元件90的部分和多个构件110中的两个相邻构件的部分。
96.在一些实施例中,构件110的外围构件部分112的第二尺寸112b对在已弯曲的长形元件的凸侧91上在相邻构件110之间形成的间隙94没有影响(或基本上没有影响)。
97.在一些实施例中,第二尺寸112b被确定为防止相邻构件110在已弯曲的长形元件90的凹侧92上彼此重叠。在一些实施例中,构件110的外围构件部分112的第二尺寸112b的范围在0.05mm
‑
0.3mm之间。
98.现在参考图3a和图3b,这些图是根据本发明的一些实施例的用于保持长形元件90的横向横截面轮廓的形状的盘绕装置200的示意图。
99.根据一些实施例,盘绕装置200包括沿着装置200的纵向轴线201布置的多个线圈210,其中多个线圈210中的相邻线圈彼此螺旋连接以形成盘绕装置200(例如,如图3a所示)。
100.在一些实施例中,装置200的线圈210可以类似于上文参照图1a
‑
图1e和图2a
‑
图2f所描述的装置100的构件110。在一些实施例中,盘绕装置200可以通过将装置100的多个构件110中的相邻构件(例如,如上文参照图1a
‑
图1e和图2a
‑
图2f所描述的)彼此螺旋连接而制成。
101.盘绕装置200可以实现线圈210(例如,装置200的线圈)相对于彼此的期望的相对运动量。盘绕装置200可以实现线圈210的外围构件部分212在垂直于装置200的纵向轴线201的方向上的期望的形变量和/或弹性量。例如,线圈210/线圈210的外围部分212可以在垂直于纵向轴线201的方向上稍微扩张/塌缩。
102.在一些实施例中,与要一起使用的长形元件90的横截面轮廓的尺寸相比,盘绕装置200的线圈210的中心构件开口214的尺寸214a略小(不超过5%)。
103.例如,如果长形元件90是具有6mm直径的杆,那么线圈210的中心构件开口214的内径214a可以是,例如5.9mm。因此,当接纳杆90时,线圈210可以稍微扩张,并且当杆90接纳在线圈中时,线圈210进一步推到杆90上,从而在盘绕装置200内提供杆90的紧密支撑。
104.在一些实施例中,止动件220将线圈210可移除地附连在盘绕装置200的两个端部处(例如,如图3b所示),例如以防止在弯曲期间盘绕装置200的不期望的扭曲/解扭和/或轴向滑动。止动件220可以类似于上文参照图1c和图1d所描述的止动件120。
105.现在参考图3c和图3d,这些图是根据本发明的一些实施例的组件202的示意图,该组件202包括用于保持长形元件90的横向横截面轮廓的形状的两个盘绕装置200a、200b。
106.根据一些实施例,多于一个的盘绕装置200可以与长形元件90一起使用。例如,可以使用具有第一线圈210a的第一盘绕装置200a和具有第二线圈210b的第二盘绕装置200b(例如,如图3c所示的盘绕装置200a和200b)。
107.第一盘绕装置200a可以紧密接纳和支撑长形元件90(例如,如上文参照图3a
‑
图3b所描述的)。第二盘绕装置200b可以紧密接纳和支撑第一盘绕装置200a,其中在第一盘绕装置200a中支撑长形元件90(例如,如图3c所示)。
108.在一些实施例中,第二盘绕装置200b相对于第一盘绕装置200a定位,使得第二盘绕装置200b的第二线圈210b与第一盘绕装置200a的相邻第一线圈210a之间的接触区域210a(1)重叠(例如,如图3c和图3d所示)。
109.第二盘绕装置200b相对于第一盘绕装置200a的这种相关定位可以例如在已加热的长形元件90被弯曲时限制已加热的长形元件90的部分到第一盘绕装置200a的相邻第一线圈210a之间的间隙94中的突出量。以这种方式,已加热的长形元件90的部分不会突出到间隙94中超过第一线圈210a的外围构件部分212的第二尺寸212b(例如,如图3d所示)。
110.现在参考图4a、图4b和图4c,这些图分别是根据本发明的一些实施例的组件301的示意图,该组件301包括用于保持长形元件90的横向横截面轮廓的形状的装置300以及封套330、340和350。
111.图4a示出了组件301的等轴视图和组件301的横截面aa。图4b和图4c示出了组件301的纵向横截面视图。
112.根据一些实施例,组件301包括用于保持长形元件90的横截面轮廓的形状的装置310以及封套。图4a、图4b和图4c分别示出了封套330的第一实施例、封套340的第二实施例和封套350的第三实施例的示意图。
113.装置300可以包括沿着装置300的纵向轴线301布置的多个构件310。在各种实施例中,装置300和构件310可以分别类似于上文参照图1a
‑
图1e和图2a
‑
图2f所描述的装置100和构件110,和/或分别类似于上文参照图3a
‑
图3b所描述的装置200和线圈210。
114.封套可以环绕构件310和支撑在构件310中的长形元件90。封套可以由弹性材料制成。封套可以由在预定的温度值(例如,在400℃)下不经历热形变的材料制成。封套可以由生物相容的材料制成。封套可以布置成在长形元件90弯曲之后从构件310/长形元件90释放。
115.图4a示意性地示出了封套330的第一实施例。封套330可以包括管331。管331可以由例如镍钛诺制成。管331可以在形状和尺寸上适于紧密包封装置300的构件310。管331可以包括沿着管331的整个(或基本上整个)长度的凹痕332。与管331的其他区域相比,管331在凹痕332附近的强度可以更小。凹痕332到管331的壁中的凹入量可以是预定的,以便能够例如在长形元件90弯曲之后并且在将长形元件90植入患者体内之前使管331破裂或撕裂并释放。
116.图4b示意性示出了封套340的第二实施例。封套340可以包括波纹管341。波纹管(诸如波纹管341)的使用可以提供气密性罩(air
‑
tight cover),该气密性罩足够柔软,从而能够弯曲波纹管及其内容物。将明显的是,提供这些特征的其他封套可以用于此目的。当长形元件90插入到波纹管341内的搁置位置时,封套340的波纹管341部分可以覆盖长形元件90的至少一部分。封套340可以由例如不锈钢制成。封套340可以例如包括适于封闭波纹管341的第一端部341a的第一盖342和适于封闭波纹管341的第二端部341b的第二盖344。
117.在一些实施例中,第一盖342可以包括近侧第一盖部分342a和远侧第一盖部分342b。近侧第一盖部分342a可以连接到波纹管341的第一端部341a,并且远侧第一盖部分342b可以拧到到近侧第一盖部分342a上。在一些实施例中,封套340可以包括密封件346。密封件346可以设置在近侧第一盖部分342a和远侧第一盖部分342b之间。
118.在一些实施例中,第一盖342(例如远侧第一盖部分342b)可以包括用于杆的连接器343,该连接器343用于将组件301插入到加热装置中以用于加热。
119.当远侧第一盖部分342b从近侧第一盖部分342a上拧下时,长形元件90的端部可以从近侧第一盖部分342a突出,并且可以从封套340可滑动地释放。
120.图4c示意性地示出了封套350的第三实施例。封套350可以包括波纹管351。封套350可以由例如不锈钢制成。封套350可以例如包括适于封闭波纹管351的第一端部351a的盖352。当长形元件90插入到波纹管351内的搁置位置时,封套350的波纹管351部分可以覆盖长形元件90的至少一部分。波纹管351的第二端部351b可以是例如封闭端部。
121.在一些实施例中,盖352可以包括第一盖部分352a和第二盖部分352b。第一盖部分352a可以连接到波纹管351的第一端部351a,并且第二盖部分352b可以拧到第一盖部分352a上。在一些实施例中,封套350可以包括密封件356。密封件356可以设置在第一盖部分352a和第二盖部分352b之间。
122.当第二盖部分352b从第一盖部分352a上拧下时,长形元件90可以从封套350可滑动地释放。
123.在一些实施例中,组件301可以作为进一步包括长形元件90的套件提供。长形元件90、装置300和封套的至少内部部分可以是无菌的。封套的外部部分可以不是无菌的。装置310可以旋拧到长形元件90上,并且装置310和长形元件90都可以插入到封套中。容纳无菌长形元件90和无菌装置310的封套可以插入到用于加热长形元件90的加热装置中,并且然后插入到用于使长形元件90弯曲的弯曲装置中,同时保持长形元件90和装置310无菌。在弯曲和冷却时,具有非无菌手的人可以握住封套并且例如拧开封套的盖(例如,如上文参照图4b和图4c所描述的),而具有无菌手的人可以从封套内移除无菌长形元件90。以这种方式,封套可以允许使用非无菌加热装置和/或非无菌弯曲装置。
124.如上文描述的,包含热塑性聚合物的长形元件90应该被加热或被预加热以便成形(例如弯曲)。在一些实施例中,长形元件90的加热/预加热使用本领域已知的任何加热装置来完成。例如,在将长形元件90定位到弯曲装置中之前或在将长形元件90定位在弯曲装置中时,可以使用激光、红外辐射或感应或电阻来加热长形元件90。
125.在一些实施例中,长形元件90可以在对其加热和弯曲之前设置在横截面轮廓保持装置(例如,装置100、200,如上文分别参照图1a
‑
图1e和图2a
‑
图2f、图3a
‑
图3b描述的)内。在一些实施例中,具有横截面轮廓保持装置的长形元件90可以在对其加热和弯曲之前设置在封套内(例如,上文分别参照图4a、图4b、图3c描述的封套330、340、350)。
126.为了清楚起见,下文参照图5、图6a
‑
图6c、图7a
‑
图7e、图8a
‑
图8e、图9a
‑
图9b和图10a
‑
图10c的描述涉及“长形组件”或“长形组件80”,其中长形组件80可以包括以下中的至少一个:长形元件90、可移除地设置在横截面轮廓保持装置内的长形元件90和可移除地容纳设置在横截面轮廓保持装置内的长形元件90的封套。
127.现在参考图5,图5是根据本发明的一些实施例的用于加热长形组件的加热装置400的示意图。
128.根据一些实施例,加热装置400包括壳体410和至少部分地包封壳体410的至少一个加热元件420。
129.在一些实施例中,壳体410是环形的(或基本上环形的)主体(例如,如图5所示)。壳体410可以具有内部412,内部412被布置成接纳和容纳长形组件。应当注意,为了清楚起见,长形组件未在图5中示出。
130.在一些实施例中,至少一个加热元件420具有螺旋形状,并且沿着壳体410的整个(或基本上整个)长度包封壳体410。例如,加热装置400可以包括三个加热元件:第一加热元件422、第二加热元件444和第三加热元件426(例如,如图5所示)。使用多于一个的加热元件可以实现长形组件的加热,即使当其中一个加热元件失效时也可以实现。
131.在一些实施例中,加热元件420可以是低电压的,可选地由电池供电。例如,加热元件420由48伏dc电池供电。
132.根据一些实施例,加热装置400是无菌的。例如,加热装置400可以由能够在每个操作程序之前/之后对整个加热装置(例如,包括壳体和加热元件组420)进行杀菌的材料制成。
133.根据一些实施例,加热装置400可以不需要杀菌。
134.在一些实施例中,长形组件可以包括容纳设置在横截面轮廓保持装置内的长形元件的封套,其中封套可以在加热长形元件90和/或使长形元件90弯曲期间保持长形元件90无菌(例如,如上文参照图4a
‑
图4c描述的)。
135.在一些实施例中,加热装置400包括加热封套430(例如,如图5所示)。加热封套430可以由可能已杀菌的材料(例如不锈钢)制成。
136.加热封套430可以包括第一加热封套端部431、第二加热封套端部432和加热元件内部433。加热封套430可以例如在第一加热封套端部431上包括开口431a,并且可以例如在第二加热封套端部432处封闭。
137.加热封套430可以通过开口431a接纳长形组件,并且可以将长形组件容纳在加热封套内部433内。带有长形组件的加热封套430可以定位在壳体410的壳体内部412内。加热装置400可适于通过加热元件420供应期望的热能的量,以将长形组件(并且特别是设置在其中的长形元件90)的温度升高到预定的温度值(例如400℃)。
138.以这种方式(例如,使用封套330、340、350或加热封套430),长形组件(并且特别是设置在其中的长形元件90)可以被加热到预定的温度值,同时消除了在每个操作程序之前/之后对加热装置400进行杀菌的需要。
139.根据各种实施例,长形组件和加热封套430是套件的一部分。
140.现在参考图6a、图6b和图6c,这些图是根据本发明的一些实施例的用于使长形组件80弯曲的弯曲装置500的示意图。
141.根据一些实施例,弯曲装置500包括多个弯曲单元510(例如,如图6a所示)。弯曲单元510可以定位在相对于彼此的一距离511处(例如,如图6a所示)。在一些实施例中,相邻弯曲单元510之间的距离511的范围在10mm
‑
20mm之间。在一些实施例中,弯曲单元510的数量的范围在10个
‑
30个之间。应当注意,为了清楚起见,图6a、图6b和图6c示出了四(4)个弯曲单元510。
142.每个弯曲单元510可以包括接纳构件512和驱动组件514(例如,如图6a所示)。
143.弯曲单元510的每个接纳构件512可以在初始位置512a(例如,如图6a和图6b所示)和至少一个其他位置512b(例如,如图6c所示)之间是可移动的。
144.当所有接纳构件512都处于其初始位置512a时(例如,如图6a和图6b所示),接纳构件512可以在平面505中沿着弯曲装置500的纵向轴线501对齐。弯曲单元510的接纳构件512可以被布置成当接纳构件512处于初始位置512a时接纳长形组件80的相应部分(例如,如图6b所示)。应当注意,仅为了清楚起见,长形组件80未在图6a中示出。
145.当每个接纳构件512在其各自的初始位置512a和至少一个其他位置512b之间移动时(例如,如图6a所示),每个接纳构件512可以在第一方向502上和/或在垂直于纵向轴线501的第二方向503上是可移动的。例如,弯曲单元510的驱动组件514可以被布置成分别在接纳构件512的各自的初始位置512a和至少一个其他位置512b之间移动各自的接纳构件512。
146.每个接纳构件512的移动方向和/或移动量和/或至少一个其他位置512b可以基于例如设置在长形组件80内的长形元件90的期望的弯曲轮廓来确定。长形元件90的期望的弯曲轮廓可以基于例如长形元件90的植入部位的解剖结构来确定/预先确定(例如,如下文参照图11所描述的)。
147.长形组件80可以在将其定位在弯曲装置500中之前被预加热(例如,使用如上文参照图5描述的加热装置400)。可替代地,长形组件80可以在将其定位在弯曲装置500中时使用例如激光或红外辐射来加热。
148.在将长形组件80定位在弯曲装置500中时,至少一个弯曲单元510的接纳构件512可以基于预定的弯曲轮廓在一个方向或两个方向502、503上从接纳构件512的初始位置512a移动到接纳构件512的其他位置512b中的一个位置,从而将长形组件80和设置在其中的长形元件90弯曲成期望的形状。例如,图6c示出了弯曲单元510中的一个弯曲单元的接纳构件512处于接纳构件512的其他位置512b中的一个位置,并且其他弯曲单元510的接纳构件512处于接纳构件512的初始位置512a。
149.在一些实施例中,弯曲单元510的接纳构件512可以旋转(例如,围绕垂直于平面505的轴线),以提供对长形组件80和设置在其中的长形元件90的平滑弯曲(例如,如图6c所示)。
150.以这种方式,包含热塑性聚合物的长形元件90(例如,设置在长形组件80内)可以根据预定的弯曲轮廓弯曲,同时防止长形元件90在其弯曲区域中的横截面轮廓的形状的变形。
151.根据一些实施例,弯曲装置500包括连接器560。连接器560可以是例如可形变的线或绳索。每个连接器560可以在其端部处连接到相邻弯曲单元510的接纳构件512(例如,如图6a
‑
图6c所示)。连接器560可以限制相邻接纳构件512相对于彼此的移动量,从而限制长形元件90在其弯曲区域中的弯曲半径。可以确定连接器560的长度,以确保长形元件90在弯曲区域中的弯曲半径不会超过预定的弯曲半径值。在一些实施例中,预定的弯曲半径值为45mm。
152.现在参考图7a、图7b、图7c、图7d和图7e,这些图是根据本发明的一些实施例的用于使长形组件弯曲的弯曲装置600的示意图,该弯曲装置600包括具有机械可调节的驱动组件614的弯曲单元610。
153.图7a示出了弯曲装置600的透视图,并且图7b、图7c、图7d和图7e示出了单个弯曲单元610的侧视图。
154.根据一些实施例,弯曲装置600包括壳体630,壳体630被布置成容纳弯曲装置600的多个弯曲单元610(例如,如图7a所示)。
155.根据一些实施例,每个弯曲单元610包括接纳构件612和驱动组件614,驱动组件614联接到相应的接纳构件612,并被布置成基于长形元件90的预定的弯曲轮廓移动相应的接纳构件612。
156.在一些实施例中,装置600的弯曲单元610(例如,接纳构件612和驱动组件614)可以类似于上文参照图6a
‑
图6c描述的弯曲单元510(例如,接纳构件512和驱动组件514)。
157.为了清楚起见,图7b、图7c、图7d和图7e示出了单个弯曲单元610。应当注意,其他弯曲单元610可以具有类似的结构并以类似的方式操作。
158.根据一些实施例,每个弯曲单元610的驱动组件614包括移动器614a和致动臂614b。
159.每个弯曲单元610的移动器614a可以在初始移动器位置614a
‑
1和至少一个另外的移动器位置614a
‑
2之间是可移动的,并被布置成在由相应的致动臂614b致动时(例如,如下文参照图7b、图7c、图7d和图7e描述的)限定/指示相应的接纳构件612的移动量。
160.根据一些实施例,每个弯曲单元610的每个驱动组件614包括第一轨道614c、第二轨道614d、可旋转臂614e和旋转轴线臂614f(例如,如图7b、图7c、图7d和图7e所示)。
161.根据一些实施例,每个驱动组件614的第一轨道614c可以在其端部处在平行于平面605的平面中并且在第一方向602上联接到壳体630(例如,如图7b、图7c、图7d和图7e所示)。
162.根据一些实施例,每个弯曲单元610的接纳构件612可以在其端部612c处联接到相应的第一轨道614c,并且被布置成在其相应的初始位置612a和至少一个其他位置612b之间沿着相应的第一轨道614c移动。
163.根据一些实施例,每个驱动组件614的可旋转臂614e可以在其第一端部614e
‑
1处枢转地联接到相应接纳构件612的端部612c,并且可以在其第二端部614e
‑
2处枢转地联接到相应致动臂614b的第一端部614b
‑
1。
164.根据一些实施例,每个驱动组件614的致动臂614b的第二端部614b
‑
2可以从壳体630延伸。在一些实施例中,所有弯曲单元610的驱动组件614的致动臂614b的第二端部614b
‑
2使用致动杆613c连接。
165.每个驱动组件614的致动臂614b可以在其初始位置614b
‑
3和延伸位置614b
‑
4之间是可移动的(例如,在平行于平面605的平面中和在第一方向602上是可移动的)。
166.在一些实施例中,每个驱动组件614的致动臂614b包括一个或更多个止动件614b
‑
5,以限制致动臂614b在其初始位置614b
‑
3和延伸位置614b
‑
4之间的运动。
167.在一些实施例中,所有弯曲单元610的所有驱动组件614的致动臂614b可以例如通过(相对于壳体630)手动推动/拉动连接驱动组件614的致动臂614b的第二端部614b
‑
2的致动杆613c而同时移动。
168.根据一些实施例,每个驱动组件614的第二轨道614d可以在其端部处联接到壳体630,并且当相应的致动臂614b完全延伸时(例如,如图7c所示),可以与可旋转臂614e平行地对齐。
169.根据一些实施例,每个驱动组件614的移动器614a可以可移动地联接到第二轨道614d,并且可以被布置成沿着第二轨道614d在该移动器的相应的初始位置614a
‑
1和相应的至少一个另一位置614a
‑
2之间移动。
170.在一些实施例中,每个驱动组件614的移动器614a可以由弯曲装置600的使用者手动移动。在一些实施例中,每个驱动组件614的移动器614a可以包括附连机构(例如,弹簧加载的附连机构),该附连机构可以在例如被按压时实现移动器的运动,并且在被释放时保持移动器的位置。
171.根据一些实施例,每个驱动组件614的旋转轴线臂614f可以在其第一端部614f
‑
1处联接到相应的移动器614a,并且在其第二端部614f
‑
2处可移动地联接到相应的驱动组件614的相应的可旋转臂614e。
172.在一些实施例中,每个驱动组件614的旋转轴线臂614f的第二端部614f
‑
2可以被布置成至少部分地包围相应的可旋转臂614e,并且在相应的可旋转臂614e上的凹陷(dent)614e
‑
3内移动。每个驱动组件614的可旋转臂614e的凹陷614e
‑
3可以在可旋转臂614e的第一端部614e
‑
1处开始,并且可以沿着旋转臂614e的至少一部分且沿着旋转臂614e的至少一侧朝向旋转臂614e的第二端部614e
‑
2延伸。
173.根据一些实施例,每个驱动组件614的旋转轴线臂614f的第二端部614f
‑
2的位置(由相应的移动器614a的位置614a
‑
1、614a
‑
2指示)可以限定旋转轴线,相应的旋转臂614e将在由相应的致动臂614b致动时围绕该旋转轴线旋转。
174.例如,每个驱动组件614的致动臂614b在其延伸位置614b
‑
4和初始位置614b
‑
3之间的移动可以移动相应的可旋转臂614e的第二端部614e
‑
2,从而围绕由相应的旋转轴线臂614f的第二端部614f
‑
2限定的旋转轴线旋转相应的可旋转臂614e,并且沿着相应的第一轨道614c将相应的接纳构件612移动到接纳构件612的其他位置612b中的一个位置(例如,如图7e所示)。
175.在一些实施例中,确定每个驱动组件614的第一轨道614c的长度、旋转轴线臂614f的长度、角度614d
‑
1和角度614f
‑
3,以确保当相应的移动器614a处于其初始位置614a
‑
1时,相应的旋转轴线臂614f的第二端部614f
‑
2与相应的可旋转臂614e的第一端部614e
‑
1相邻,从而确保相应的接纳构件612保持在其初始位置612a而与相应的致动臂614b的移动无关。
176.在一些实施例中,确定每个驱动组件614的第一轨道614c的长度、旋转轴线臂614f的长度、角度614d
‑
1和角度614f
‑
3,以确保当相应的致动臂614b处于其延伸位置614b
‑
4时,相应的可旋转臂614e平行于(或基本上平行于)相应的第二轨道614d。
177.由相应的旋转轴线臂613d的第二端部614f
‑
2的位置(该位置又由相应的移动器614a的位置614a
‑
2限定)限定的每个驱动组件614的旋转臂614e的旋转轴线相对于第一端部614e
‑
1的偏移指示/限定了相应的接纳构件612相对于其初始位置612a的移动量。旋转臂614e的旋转轴线的偏移越大,接纳构件612的移动/位移量就越大。
178.以这种方式,弯曲单元610的移动器614b的位置614b
‑
2指示/限定了相应的接纳构件612的移动量。
179.根据一些实施例,弯曲装置600可以容易地预先设定,以便将长形组件(并且特别是设置在其中的长形元件90)弯曲成期望的形状。下文的描述(仍参照图7b
‑
图7e所做出)提供了预先设定弯曲装置600的示例性方法。在各种实施例中,该方法不需要行进经过每个阶段或以与描述完全相同的顺序行进。
180.在第一阶段,所有弯曲单元610的所有驱动组件614的致动器臂614b可以从其初始位置614b
‑
1移动到其延伸位置614b
‑
2。这可以通过例如拉动致动杆613c(例如,致动杆613c连接所有弯曲单元610的驱动组件614的致动臂614b)远离弯曲装置600的壳体630(例如,如由图7b中的箭头619a指示的)来完成。
181.在下一阶段,每个弯曲单元610的每个驱动组件614的移动器614a的位置可以被设定成基于长形元件90的期望的弯曲轮廓(例如,如由图7c中的箭头619b指示的)来限定/指示相应的弯曲单元610的接纳构件612的移动量。
182.例如,一些弯曲单元610的驱动组件614的移动器614a可以从其初始位置614a
‑
1移动到其其他的位置614a
‑
2中的一个位置,以限定相应的一些弯曲单元的接纳构件612在致
动时的移动量。然而,在该示例中,其他弯曲单元610的驱动组件614的移动器614a可以保持在其初始位置614a
‑
1,以便确保相应的其他弯曲单元的接纳构件612在致动时将保持静止在它们的初始位置612a。
183.在一些实施例中,可以在壳体630上邻近弯曲单元610的移动器612a来制作刻度标记,以便能够容易地操作和设定移动器612a的位置。
184.在下一阶段,已加热的长形组件可以定位在弯曲单元610的接纳构件612内。为了清楚起见,长形组件未在图7a
‑
图7e中示出。
185.可替代地,长形组件可以在其被定位在弯曲装置600内时,例如使用红外或激光辐射被加热。
186.在下一阶段,连接所有弯曲单元610的所有驱动组件614的致动臂614b的致动杆613c可被推动朝向弯曲装置600的壳体630(例如,如由图7d中的箭头619c指示的),从而调节由相应的弯曲单元610的移动器614a的位置所限定/指示的所有弯曲单元610的接纳构件612的位置,并将长形组件(并且特别是设置在其中的长形元件90)弯曲成期望的形状(例如,如图7e所示)。
187.以这种方式,弯曲装置600可以容易地预先设定以将长形组件和设置在其中的长形元件90弯曲成期望的弯曲形状。
188.根据一些实施例,整个弯曲装置600(例如,上文参照图7a
‑
图7e描述的)可以在每个操作程序之前/之后进行杀菌。
189.现在参考图8a,该图是根据本发明的一些实施例的用于使长形组件弯曲的弯曲装置700的示意图,该弯曲装置700具有弯曲单元710,该弯曲单元710具有机动驱动组件714。
190.根据一些实施例,弯曲装置700包括多个弯曲单元710和控制器740(例如,如图8a所示)。
191.每个弯曲单元710可以包括接纳构件712和机动驱动组件714,接纳构件712被布置成接纳长形组件的一部分,机动驱动组件714被布置成基于长形元件90的期望的弯曲轮廓在接纳构件712的相应初始位置712a和至少一个其他位置712b之间移动相应弯曲单元710的接纳构件712。
192.在一些实施例中,装置700的弯曲单元710(例如,接纳构件712和驱动组件714)可以类似于上文参照图6a
‑
图6c描述的弯曲单元510(例如,接纳构件512和驱动组件514)。
193.每个弯曲单元710的每个驱动组件714可以包括至少一个马达714g(例如,如图8a所示)。例如,马达714g可以是旋转马达。每个弯曲单元710的接纳构件712可以使用例如传动子单元715联接到相应驱动组件714的马达714g。每个弯曲单元710的传动子单元715可以被布置成例如将由相应驱动组件714的马达714g产生的旋转传递为相应弯曲单元710的接纳构件712的平移移动。
194.控制器740可以联接到所有弯曲单元710的驱动组件714,并且可以被构造成控制驱动组件714的操作,并且因此基于期望的弯曲轮廓控制所有弯曲单元710的接纳构件712在第一方向702和/或第二方向702上的移动/位移。
195.在一些实施例中,控制器740可以被构造成限制相邻接纳构件712相对于彼此的移动量,从而限制长形组件和设置在长形组件中的长形元件90在其弯曲区域中的弯曲半径,并确保弯曲半径不超过预定的最小弯曲半径值(例如,45mm)。
196.在一些实施例中,马达714g可以是可杀菌的马达。以这种方式,整个弯曲装置700(例如,如上文参照图8a描述的)可以在每个操作程序之前/之后被杀菌。
197.现在参考图8b、图8c、图8d和图8e,这些图是根据本发明的一些实施例的用于使长形组件弯曲的弯曲装置700的单个机动弯曲单元710的示意图。
198.图8b示出了弯曲单元710的分解图。图8c和图8d示出了弯曲单元710的拆解图。图8e示出了弯曲单元710的组装图。
199.根据一些实施例,弯曲装置700包括接纳构件壳体732和驱动组件壳体734,接纳构件壳体732被布置成容纳所有弯曲单元710的接纳构件712,驱动组件壳体734被布置成容纳所有弯曲单元的驱动组件714(例如,如图8b
‑
图8e所示)。为了清楚起见,图8b
‑
图8e示出了单个弯曲单元710。应当注意,其他弯曲单元710可以具有类似的结构并以类似的方式操作。
200.接纳构件壳体732和驱动组件壳体734可以是可拆卸地联接的。在一些实施例中,接纳构件壳体732和驱动组件壳体734中的至少一个可以包括至少一个磁体733(例如,如图8b和图8c所示)。磁体733可以确保接纳构件壳体732与驱动组件壳体734的紧密接触/联接,同时能够容易地将二者拆卸。
201.根据一些实施例,每个弯曲单元710可以包括杆732a,该杆732a在其端部处以平行于平面705并且在第一方向702上对齐的方式附接在接纳构件壳体732内(例如,如图8b
‑
8e所示)。每个弯曲单元710的接纳构件712可以可移动地联接到相应的杆732a,并且被布置成在第一方向702上沿着相应的杆732移动。在一些实施例中,每个杆732a包括沿着杆732a的整个长度的螺纹。
202.在一些实施例中,每个弯曲单元710的传动子单元715可以位于接纳构件壳体732中。每个弯曲单元710的传动单元715可以例如包括第一齿轮715a和第二齿轮715b,第一齿轮715a安装在相应的第三轨道732a上,第二齿轮715b垂直于第一齿轮715a并能够可拆卸地联接到相应的驱动组件714的马达714g(例如,如图8b
‑
8e所示)。
203.例如,每个弯曲单元710的传动子单元715的第二齿轮715b可以包括突出部715b
‑
1,并且相应驱动组件714的马达714g可以在马达连接器714g
‑
2上包括配合凹痕714g
‑
1。当接纳构件壳体732联接到驱动组件壳体734时,每个弯曲单元710的传动子单元715的第二齿轮715b的突出部715b
‑
1可以进入相应驱动组件714的马达714g的凹痕714g
‑
1。
204.每个弯曲单元710的传动子单元715可以被布置成将由相应驱动组件714的马达714g产生的旋转转换成相应弯曲单元710的接纳构件712在第一方向702上的平移移动。例如,每个弯曲单元710的传动子单元715可以将由相应驱动组件714的马达714g产生的旋转转换成相应杆732a的旋转,并导致相应接纳构件712在第一方向702上的移动。
205.根据一些实施例,弯曲装置700可以包括覆盖物750。覆盖物750可以是例如无菌塑料层和/或织物(fabric),并且可以被布置成在接纳构件壳体732联接至驱动组件壳体734之前覆盖驱动组件壳体734。在这些实施例中,每个弯曲单元710的传动子单元715的第二齿轮715b的突出部715b
‑
1可以具有期望的锐度(sharpness)的量,以在接纳构件壳体732被联接到驱动组件壳体734时切割穿过覆盖物750。
206.在这些实施例中,驱动组件714(例如,马达714g)和驱动组件壳体734不需要杀菌,而接纳构件712和接纳构件壳体732可以在每个操作程序之前/之后杀菌。
207.弯曲装置(例如上文参照图7a
‑
图7e和图8b
‑
图8e描述的那些弯曲装置)的一些实
施例能够在单个平面(例如,分别在平面605、705)中使长形组件(并且特别是长形元件90)弯曲,并且由此提供长形元件90的二维弯曲。根据一些实施例,弯曲装置可能能够在多于一个的平面中使长形组件和/或长形元件90弯曲,并因此提供长形元件90的三维弯曲(例如,如下文参照图9a和9b描述的)。
208.现在参考图9a和图9b,这些图是根据本发明的一些实施例的能够提供长形组件的三维弯曲的弯曲装置800的示意图。
209.根据一些实施例,弯曲装置800包括多个弯曲单元810。每个弯曲单元810可以包括接纳构件812和驱动组件814,接纳构件812被布置成接纳长形组件的一部分,驱动组件814被布置成基于长形元件90的期望的弯曲轮廓在接纳构件812的相应初始位置812a和至少一个其他位置812b之间移动相应弯曲单元810的接纳构件812。
210.在一些实施例中,装置800的弯曲单元810(例如,接纳构件812和驱动组件814)可以类似于上文参照图6a
‑
图6c描述的弯曲单元510(例如,接纳构件512和驱动组件514)。
211.根据一些实施例,弯曲单元810的驱动组件814可以被布置成在第一方向802(例如,平行于平面805)和第二方向803两者上移动相应的接纳构件812。
212.根据一些实施例,每个弯曲单元810的驱动组件814包括铰接臂814j(例如,如图9a所示)。每个驱动组件814的铰接臂814j可以在其第一端部处枢转地联接到壳体810,并且可以在其第二端部处枢转地联接到相应弯曲单元810的接纳构件812。每个驱动组件814的铰接臂814j可以实现相应的接纳构件在第一方向802和/或第二方向803上的移动(例如,如图9a所示)。
213.根据一些实施例,每个弯曲单元810的驱动组件814包括一对杆814m(例如,如图9b所示)。每个驱动组件814的杆814m可以联接到壳体830,并且在垂直于平面805的第二方向803上延伸。
214.每个弯曲单元810的接纳构件812可以可移动地联接到相应驱动组件814的第一轨道814c,并且被布置成在第一方向802上沿着相应的第一轨道814c移动。每个驱动组件814的第一轨道814c可以在其端部处可移动地联接到相应的杆814m,并且可以被布置成在第二方向803上沿着相应的杆814m移动。以这种方式,每个弯曲单元810的接纳构件812可以在第一方向802和第二方向803两者上移动。
215.根据一些实施例,每个接纳构件812可以包括被布置成覆盖相应接纳构件812的盖812e。盖812e可以被布置成防止长形组件在弯曲期间从接纳构件812脱离。
216.根据各种实施例,上文参照图9a和图9b描述的每个弯曲单元810的每个驱动组件814可以是手动可调节的(例如,如上文参照图7a、图7b、图7c、图7d和图7e描述的)或机动的(例如,如上文参照图8a、图8b、图8c、图8d和图8e描述的)。
217.现在参考图10a,该图是根据本发明的一些实施例的用于使长形组件弯曲的系统900的框图。
218.根据一些实施例,系统900可以包括用于保持长形元件90的横截面轮廓的装置910、加热装置920和弯曲装置930。在一些实施例中,系统900可以包括组件912,组件912包括装置910和封套911。
219.装置910可以接纳并紧密支撑长形元件90,并防止长形元件90在弯曲期间变形。在各种实施例中,装置910可以是上文参照图1a、图1b、图1c、图1d和图1e以及图2a、图2b、图
2c、图2d、图2e和图2f描述的装置100,上文参照图3a、图3b、图3c和图3d描述的装置200,和/或上文参照图4描述的装置300。
220.在各种实施例中,长形元件90和/或支撑在装置910内的长形元件90可以容纳在封套911内,从而提供长形组件914。例如,封套911可以是上文分别参照图4a、图4b和图4c描述的封套330、封套340或封套350。
221.加热装置920可以接纳长形组件914,并将设置在长形组件914中的长形元件90的温度升高到预定的温度压力(例如,380℃)。在一些实施例中,加热装置920可以是上文参照图5描述的加热装置400。
222.弯曲装置930可以接纳长形组件914,并基于预定的弯曲轮廓使长形组件914(并且特别是设置在其中的长形元件90)弯曲。在一些实施例中,弯曲装置930可以是上文参照图6a、图6b和图6c、图7a、图7b、图7c、图7d和图7e、图8a、图8b、图8c、图8d和图8e以及图9a和图9b描述的弯曲装置中的任何弯曲装置。
223.现在参考图10b和图10c,这些图是根据本发明的一些实施例的加热装置920和弯曲装置930的联接的各种构型的示意图。
224.根据一些实施例,加热装置920可以与弯曲装置930相邻地定位于能够拉动长形组件914从加热装置920进入弯曲装置930的高度处(例如,如图10b所示)。
225.根据一些实施例,加热装置920可以定位于弯曲装置930上方(例如,如图10c所示)。在这些实施例中,加热装置920可以包括支撑板922。当长形组件914容纳在加热装置920内时,支撑板922可以支撑长形组件914。当长形元件90被加热到预定的温度值时,支撑板922可以被移除,从而让长形组件落入弯曲装置930中。
226.应当注意,尽管图10b和图10c示出了类似于上文参照图7a
‑
图7e描述的弯曲装置的弯曲装置930,但是可以使用上文参照图6a、图6b和图6c,图7a、图7b、图7c、图7d和图7e,图8a、图8b、图8c、图8d和图8e以及图9a和图9b描述的那些弯曲装置中的任何弯曲装置。
227.现在参考图11,图11是根据本发明的一些实施例的用于确定长形元件90的期望的弯曲轮廓的装置1000的示意图。
228.根据一些实施例,装置1000包括壳体1100和嵌入壳体1100中的至少一个传感器1200(例如,如图11所示)。传感器1200可能能够确定目标区域70的位置。在一些实施例中,传感器1200可以包括以下中的至少一个:gps、加速度计、陀螺仪、电磁场传感器、霍尔传感器、激光雷达、雷达或其任意组合。
229.当长形元件90是植入物时,目标区域70可以例如是植入物(例如长形元件90)与解剖区域70的连接点。例如,图11示出了作为解剖区域70的示例的脊柱节段和作为目标区域70的示例的椎弓根螺钉。在该示例中,椎弓根螺钉(例如,目标区域70)被布置成接纳和支撑杆(例如,长形元件90),该杆必须被弯曲以精确模仿解剖区域70的几何形状。
230.根据一些实施例,壳体1100可以是手持装置,并且可以由使用者(例如由外科医生)手动操作。
231.根据一些实施例,装置1000包括与壳体1100机械联接的机动单元1300。机动单元1300可以被布置成操作(例如,移动)壳体1100。
232.为了获得关于目标区域70的位置的数据,壳体1100(例如,由使用者操作或由机动单元1300操作)可以随后触碰每个目标区域70,并且传感器1200可以生成关于目标区域70
的位置的数据。
233.根据一些实施例,装置1000可以包括控制器1400。控制器1400可以与传感器1200通信(例如,有线或无线),并且可以被构造成从传感器1200接收关于目标区域70的位置的数据。
234.在一些实施例中,控制器1400可以被构造成基于关于目标区域70的位置的数据来确定长形元件90的期望的弯曲轮廓。
235.在一些实施例中,控制器1400可以与弯曲装置的控制器(例如,诸如上文参照图8a描述的弯曲装置700的控制器740)通信。控制器1400可以被构造成将期望的弯曲轮廓传输到弯曲装置的控制器,该弯曲装置的控制器可以被构造成操作弯曲装置的弯曲单元(例如,诸如上文参照图8a
‑
图8e描述的弯曲单元710)以基于长形元件90的期望的弯曲轮廓来使长形元件90弯曲。
236.在一些实施例中,关于目标区域70的位置的数据可以被传输到弯曲装置的控制器,并且弯曲装置的控制器可以进一步被构造成基于其数据来确定期望的弯曲轮廓。
237.在一些实施例中,控制器1400可以生成包括关于弯曲装置(例如,诸如上文参照图7a
‑
图7e描述的弯曲装置600)的弯曲单元的手动操作的指令的输出。
238.根据一些实施例,装置1000可以是用于使长形元件90弯曲的系统(例如,诸如上文参照图10a
‑
图10c描述的系统900)的一部分。
239.可替代地或补充地,长形元件90的期望的弯曲轮廓可以在操作程序之前和/或期间由任何成像系统(诸如,例如计算机断层摄影(ct)、磁共振成像(mri)、x光、导航系统等)确定。
240.可替代地或补充地,可形变的模板可以用于确定长形元件90的期望的弯曲轮廓。可形变的模板可以例如具有可以与长形元件90的形状和尺寸相似的形状和尺寸。模板可以由使用者手动形变以穿过目标区域70并适配解剖区域70。然后,已形变的模板可以定位在弯曲装置中,然后可以根据已形变的模板操作弯曲装置的弯曲单元。
241.现在参考图12,该图12是根据本发明的一些实施例的使长形组件弯曲的方法的流程图。
242.应当注意,该方法不限于图12中图示的流程图和相应的描述。例如,在各种实施例中,该方法不需要行进经过每个所图示的框或阶段,或者以与所图示和所描述的完全相同的顺序行进。
243.一些实施例可以包括提供长形组件,该长形组件可以包括至少部分地被横向横截面轮廓保持装置环绕的长形元件(阶段1202)。
244.长形组件可以类似于上文描述的长形组件80。长形元件可以类似于上文描述的长形元件90。例如,长形元件可以是长形矫形植入物。横向横截面轮廓保持装置可以类似于例如上文参照图1a
‑
图1e、图2a
‑
图2f描述的装置100和上文参照图3a
‑
图3b描述的装置200。
245.一些实施例可以包括使用加热装置加热长形组件以提供已加热的长形组件(阶段1204)。加热装置可以类似于上文参照图5描述的加热装置400。
246.一些实施例可以包括根据长形元件的期望的弯曲轮廓来构造弯曲装置(阶段1206)。
247.弯曲装置可以类似于例如上文参照图6a
‑
图6c描述的弯曲装置500、上文参照图
7a
‑
图7e描述的弯曲装置600、上文参照图8a
‑
图8e描述的弯曲装置700以及上文参照图9a
‑
图9b描述的弯曲装置800。
248.可以使用例如上文参照图11描述的装置1000、成像系统(例如,ct、mri、x光等)或可形变的模板来预先确定期望的弯曲轮廓。
249.一些实施例可以包括通过弯曲装置使已加热的长形组件弯曲以提供已弯曲的长形组件,该已弯曲的长形组件包括具有期望的弯曲轮廓的已弯曲的长形元件(阶段1208)。例如,如上文参照图6a
‑
图6c、图7a
‑
图7e、图8a
‑
图8e和图9a
‑
图9b中的任何一个所描述的。
250.一些实施例可以包括冷却已弯曲的长形组件(阶段1210)。冷却可以是例如主动的。在另一个示例中,冷却可以是被动的。
251.一些实施例可以包括从已弯曲的长形元件释放横向横截面轮廓保持装置(阶段1212)。例如,如上文参照图1a
‑
图1e、图2a
‑
图2f和图3a
‑
图3b中的任何一个所描述的。
252.在一些实施例中,长形组件、加热装置和弯曲装置可以是无菌的和可杀菌的。例如,加热装置可以包括加热封套(例如,诸如上文参照图5描述的加热封套430),并且弯曲装置可以是诸如上文参照图7a
‑
图7e描述的弯曲装置600或上文参照图8b
‑
图8e描述的弯曲装置700。
253.在一些实施例中,加热装置和弯曲装置中的至少一个可以不是无菌的。在这种情况下,长形组件可以包括封套(例如,诸如上文分别参照图4a、图4b和图4c描述的封套330、340、350),该封套至少部分地包封无菌的长形矫形植入物,该无菌的长形矫形植入物至少部分地被无菌的横向横截面轮廓保持装置环绕。
254.有利的是,所公开的用于使包含热塑性聚合物的长形元件成形的装置、组件、套件、系统和方法可以实现包含热塑性元件的长形元件的成形,同时防止在成形区域中横截面轮廓的形状变形。此外,所公开的装置和系统可以位于手术室中,并且可以在手术程序期间实现所公开的装置和系统的长形元件在手术室中的成形。
255.在上文的描述中,实施例为本发明的示例或实施方式。“一个实施例”、“实施例”、“某些实施例”或“一些实施例”的各种呈现不一定都指代相同的实施例。尽管可以在单个实施例的上下文中描述本发明的各种特征,但是这些特征也可以单独地提供或以任何合适的组合提供。相反,尽管为了清楚起见,可以在本文中在单独的实施例的上下文中描述本发明,但是本发明也可以在单个实施例中实现。本发明的某些实施例可以包括来自上文公开的不同实施例的特征,并且某些实施例可以包含来自上文公开的其他实施例的元件。在特定实施例的上下文中公开的本发明的元件不应被视为将这些元件的使用仅限制在特定实施例中。此外,应当理解,本发明可以以各种方式实施或实践,并且本发明可以在除了上文的描述中概述的实施例之外的某些实施例中实现。
256.本发明不限于那些附图或相应的描述。例如,流程不需要行进经过每个所图示的框或状态,或者以与所图示和所描述的完全相同的顺序行进。除非另外定义,否则本文使用的技术和科学术语的含义应如本发明所属领域的普通技术人员通常所理解的。虽然已经参照有限数量的实施例描述了本发明,但是这些实施例不应该被解释为对本发明的范围的限制,而是作为一些优选实施例的范例。其他可能的变化、修改和应用也在本发明的范围内。因此,本发明的范围不应受到迄今为止所描述的内容的限制,而应受所附权利要求及其合法等同物的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。