技术特征:
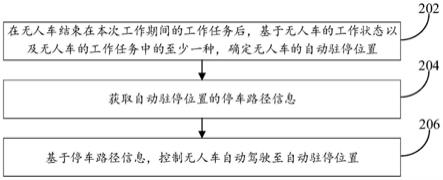
1.一种无人车的停车方法,其特征在于,所述方法包括:在所述无人车结束在本次工作期间的工作任务后,基于所述无人车的工作状态以及所述无人车的工作任务中的至少一种,确定所述无人车的自动驻停位置;获取所述自动驻停位置的停车路径信息;基于所述停车路径信息,控制所述无人车自动驾驶至所述自动驻停位置。2.根据权利要求1所述的方法,其特征在于,所述基于所述无人车的工作状态以及所述无人车的工作任务中的至少一种,确定所述无人车的自动驻停位置,包括:基于所述无人车的工作状态,在属于一个或多个停车场地中的候选停车位中确定出所述无人车的自动驻停位置;或,基于所述无人车的工作任务,在属于一个或多个停车场地中的候选停车位中确定出所述无人车的自动驻停位置;或,基于所述无人车的工作状态以及所述无人车的工作任务,在属于一个或多个停车场地中的候选停车位中确定出所述无人车的自动驻停位置。3.根据权利要求2所述的方法,其特征在于,所述工作状态包括能量剩余状态;所述基于所述无人车的工作状态,在属于一个或多个停车场地中的候选停车位中确定出所述无人车的自动驻停位置,包括:在所述无人车的所述能量剩余状态少于能量阈值的情况下,在所述候选停车位中确定具有补充能量功能的停车位作为所述无人车的自动驻停位置。4.根据权利要求2所述的方法,其特征在于,所述工作任务包括配送任务,所述配送任务是配送货物的任务;所述基于所述无人车的工作任务,在属于一个或多个停车场地中的候选停车位中确定出所述无人车的自动驻停位置,包括:在所述无人车的下个工作周期的配送任务为一个的情况下,在所述候选停车位中确定距离货物存放位置最近的停车位,作为所述无人车的自动驻停位置,所述货物存放位置是所述下个工作周期的配送任务配送的货物的存放位置;在所述下个工作周期的配送任务为多个的情况下,在所述候选停车位中根据多个货物存放位置,确定位于所述多个货物存放位置中间的停车位,作为所述无人车的自动驻停位置,所述多个货物存放位置包括所述下个工作周期的多个配送任务中每个所述配送任务配送的货物的存放位置;在所述下个工作周期的配送任务为多个的情况下,规划所述无人车在所述下个工作周期进行配送的时间最优路径或能源最省路径;在所述候选停车位中确定距离所述时间最优路径或所述能源最省路径的起点最近的停车位,作为所述无人车的自动驻停位置。5.根据权利要求2所述的方法,其特征在于,所述工作状态包括能量剩余状态,所述工作任务包括配送任务,所述配送任务是配送货物的任务;所述基于所述无人车的工作状态以及所述无人车的工作任务,在属于一个或多个停车场地中的候选停车位中确定出所述无人车的自动驻停位置,包括:在所述无人车的所述能量剩余状态不足下个工作周期需要的能量,且所述无人车的所述下个工作周期的配送任务为一个的情况下,在所述候选停车位中确定距离货物存放位置最近,且具有补充能量功能的停车位,作为所述无人车的自动驻停位置,所述货物存放位置是所述下个工作周期的配送任务配送的货物的存放位置;
在所述能量剩余状态不足所述下个工作周期需要的能量,且所述下个工作周期的配送任务为多个的情况下,在所述候选停车位中根据多个货物存放位置,确定位于所述多个货物存放位置中间,且具有补充能量功能的停车位,作为所述无人车的自动驻停位置,所述多个货物存放位置包括所述下个工作周期的多个配送任务中每个所述配送任务配送的货物的存放位置;在所述能量剩余状态不足所述下个工作周期需要的能量,且所述下个工作周期的配送任务为多个的情况下,规划所述无人车在所述下个工作周期进行配送的时间最优路径或能源最省路径;在所述候选停车位中确定距离所述时间最优路径或所述能源最省路径的起点最近,且具有补充能量功能的停车位,作为所述无人车的自动驻停位置。6.根据权利要求1至5任一所述的方法,其特征在于,所述方法还包括:向调度服务器发送所述自动驻停位置;在反馈信息反映所述自动驻停位置被占用的情况下,确定所述无人车的备用驻停位置,所述反馈信息是所述调度服务器在确定所述自动驻停位置被占用的情况下向所述无人车发送的;获取所述备用驻停位置的备用停车路径信息;基于所述备用停车路径信息,控制所述无人车自动驾驶至所述备用驻停位置。7.根据权利要求1至5任一所述的方法,其特征在于,所述无人车装备有环境感知组件,所述环境感知组件用于感知所述无人车周围的环境;所述方法还包括:在控制所述无人车自动驾驶至所述自动驻停位置的过程中,通过所述环境感知组件获取环境信息;基于所述环境信息通过同步定位与建图进行路径规划,得到局部路径信息,所述局部路径信息的局部路径用于避开根据所述环境信息确定的障碍物,所述障碍物位于所述停车路径信息的停车路径上;使用所述局部路径替换所述局部路径在所述停车路径信息的停车路径中对应的路径,得到更新路径信息;基于所述更新路径信息,控制所述无人车自动驾驶至所述自动驻停位置。8.根据权利要求1至5任一所述的方法,其特征在于,所述自动驻停位置为停车位,所述停车路径信息包括从停车起点到停车位入库点的寻库路径,和从所述停车位入库点到所述停车位的入库路径,所述无人车装备有环境感知组件,所述环境感知组件用于感知所述无人车周围的环境;所述方法还包括:响应于所述无人车自动驾驶至所述停车位入库点,通过所述环境感知组件判断所述停车位是否可用。9.根据权利要求8所述的方法,其特征在于,所述方法还包括:响应于所述停车位可用,基于所述入库路径,控制所述无人车自动驾驶至所述停车位;响应于所述停车位不可用,确定所述停车位中的障碍物的信息;上报所述障碍物的信息。10.根据权利要求8所述的方法,其特征在于,所述方法还包括:响应于所述停车位不可用,控制所述无人车以漫游的方式移动;在所述无人车进行漫游的过程中,通过所述环境感知组件搜索备用停车位;
响应于搜索到所述备用停车位,控制所述无人车自动驾驶至所述备用停车位;响应于所述无人车停入所述备用停车位,向整车控制器发送停车完成信息,所述停车完成信息用于指示所述整车控制器控制所述无人车驻车以及下电。11.根据权利要求1至10任一所述的方法,其特征在于,所述停车路径信息是采用如下方式建立的:响应于停车路径学习指令,确定学习无人车的第一当前位置作为停车起点;在所述学习无人车根据行驶控制指令行驶的过程中,根据采集的环境数据以及定位数据,持续建立所述停车路径信息;响应于停车路径学习完成指令,确定所述学习无人车的第二当前位置作为所述停车路径信息的驻停位置,并确定完成建立所述停车路径信息。12.根据权利要求11所述的方法,其特征在于,所述学习无人车装备有环境感知组件,所述环境感知组件用于感知所述学习无人车周围的环境;所述在所述学习无人车根据行驶控制指令行驶的过程中,根据采集的环境数据以及定位数据,持续建立所述停车路径信息,包括:在所述学习无人车根据所述行驶控制指令行驶的过程中,获取所述定位数据以及通过所述环境感知组件采集所述环境数据;基于所述环境数据以及所述定位数据,通过同步定位与建图建立所述停车路径信息。13.一种无人车的停车装置,其特征在于,所述装置包括:确定模块,用于在所述无人车结束在本次工作期间的工作任务后,基于所述无人车的工作状态以及所述无人车的工作任务中的至少一种,确定所述无人车的自动驻停位置;获取模块,用于获取所述自动驻停位置的停车路径信息;控制模块,用于基于所述停车路径信息,控制所述无人车自动驾驶至所述自动驻停位置。14.一种计算机设备,其特征在于,所述计算机设备包括处理器和存储器,所述存储器中存储有至少一条指令、至少一段程序、代码集或指令集,所述至少一条指令、所述至少一段程序、所述代码集或所述指令集由所述处理器加载并执行以实现如权利要求1至12任一所述的无人车的停车方法。15.一种计算机可读存储介质,其特征在于,所述可读存储介质中存储有至少一条指令、至少一段程序、代码集或指令集,所述至少一条指令、所述至少一段程序、所述代码集或指令集由处理器加载并执行以实现如权利要求1至12任一所述的无人车的停车方法。
技术总结
本申请公开了一种无人车的停车方法、装置、设备及存储介质,属于无人驾驶技术领域。所述方法包括:在无人车结束在本次工作期间的工作任务后,基于无人车的工作状态以及无人车的工作任务中的至少一种,确定无人车的自动驻停位置;获取自动驻停位置的停车路径信息;基于停车路径信息,控制无人车自动驾驶至自动驻停位置。在进行停车时,无人车能够根据确定的自动驻停位置获取停车路径信息,并基于停车路径信息自动驾驶至自动驻停位置,实现自动停车。在停车的过程中无需人工参与,能够提升无人车的停车效率。的停车效率。的停车效率。
技术研发人员:韩智强 李博 李达
受保护的技术使用者:北京三快在线科技有限公司
技术研发日:2021.10.13
技术公布日:2021/12/14
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。