1.本发明涉及立体车库驻车技术领域,尤其涉及一种用于垂直循环立体车库的车辆入出库车头方向自动控制方法及系统。
背景技术:
2.垂直循环立体车库操作简单,自动化控制程度高,作为一种存车多、占地最少、运行最简单可靠的立体停车设备,可较好的解决日益突出停车难的问题。现有的垂直循环立体车库使用中,车辆车头需对准车库的入出库门并摆直车身,才能进入车库车位,这就需要有较大的前坪场地以便车辆调整、摆正方向,并要求车技较好。当车库前坪空间较小、车辆转弯半径大、停车驾驶技术欠佳时,车辆无法在车库门前对准车头摆直车身,现有的垂直循环立体车库将不能安装使用,或较难使用,特别对新手司机停车操作难度较大,车头对准、摆直操作费时较多,停车效率大大降低。
3.目前,垂直循环立体车库在布置时,一般前坪要留足够空间,方便车辆转向调整,在车库门前将车头对准摆直,以利于高效使用停车设备。对于前坪可利用空间有限,不足以提供车辆在车库门前将车头准摆直的场合,则无法使用这种存车多、占地最少、运行最简单可靠的垂直循环立体车库。
技术实现要素:
4.为了解决上述对于前坪可利用空间有限,不足以提供车辆在车库门前将车头准摆直的场合,则无法使用这种存车多、占地最少、运行最简单可靠的垂直循环立体车库的问题,本发明提供了一种立体车库车辆入出库车头方向自动控制方法及系统,为实现上述目的,本发明提供了一种立体车库车辆入出库车头方向自动控制方法,所述立体车库包括控制器和回转台,其特征在于包括车辆入库车头方向自动检测及自动控制方法和车辆出库车头方向自动控制方法,所述车辆入库车头方向自动检测及自动控制方法包括如下步骤:s1、车辆直行驶入存车时,实时获取车辆驶入立体车库门正前方的回转台时的前轮与后轮通过回转台边缘的方位触发信号;s2、控制器根据获取方位触发信号次数,发出语音提示引导车辆完全进入回转台并正确停车;s3、控制器根据方位触发信号生成信号位置分布图像,确定车辆进入回转台的车头方向,并计算车头方向需转向正对立体车库门方向的最小回转角度和回转方向,并生成回转控制信号;s4、控制器发出回转控制指令控制回转台旋转,使车辆车头方向正对立体车库门入库方向;s5、控制器同时发出立体车库门开启控制指令,车库门开启,将车辆直行驶入载车板停车,完成入库;
所述车辆出库车头方向自动控制方法包括如下步骤:s6、根据车主将要出行方向,在控制器面板上设置回转台回转角度和回转方向;s7、控制器根据步骤s6的设置生成控制信号;s8、将车辆直行退驶入回转台,实时获取车辆驶入回转台时的前轮与后轮通过回转台边缘的触发信号;s9、控制器根据获取触发信号次数,发出语音提示引导车辆完全进入回转台并正确停车;s10、控制器发出回转控制指令自动控制回转台旋转,使车辆车头方向正对步骤s6设置的车辆驶离方向,将车辆直行驶出即可。
5.优选的,所述步骤s2和步骤s9中正确停车判定方法为:车辆前行或后退进入回转台内时,前轮每次通过回转台边缘时获取触发信号1次,后轮每次通过回转台边缘时获取触发信号1次,控制器在车辆停车后设定时间内获取累计奇数次数的触发信号,均判定为驻车异常,在车辆停车后设定时间内获取累计偶数次数的触发信号,均判定为驻车正常。
6.优选的,所述回转台包括伺服电机,步骤s3和步骤s6中控制器还将根据车头需要回转的角度计算伺服电机的回转量,所述控制信号为伺服电机的回转方向和回转量。
7.本发明还提供了一种立体车库车辆入出库车头方向自动控制系统,其特征在于,包括:回转台,所述回转台设于于立体车库的车库门正前方,包括设于顶部的回转盘和设于回转盘下部的回转动力系统,所述回转动力系统用于驱动回转盘带着停驻在回转盘上面的车辆一起旋转;方向检测模块,所述方向检测模块设于回转盘下平面上并沿回转盘外圆周边环形布置,实时检测驶入回转盘的车辆前轮和后轮通过的方位触发信号;车辆前轮和后轮每次压触方向检测模块1次,方向检测模块都将给控制器发送方位触发信号1次;控制器,所述控制器与方向检测模块通讯连接,控制器根据获取方位触发信号次数,发出语音提示引导车辆完全进入回转盘并正确停车;并根据方位信号生成信号位置分布图像,确定车辆进入回转台的车头方向,并计算车头方向需转向正对立体车库门方向的最小回转角度和回转方向,并生成回转控制信号,发出控制指令控制回转动力系统驱动回转盘按计算的最小回转角度和回转方向回转;所述控制器控制面板上设有语音提示模块,用于提示及引导汽车驾驶员在回转台上正确驻车。
8.优选的,所述回转动力系统包括伺服电机和与伺服电机相连的传动轴,所述传动轴上设有角度传感器,所述角度传感器与控制器相联,用于检测伺服电机实际旋转量和旋转方向。
9.优选的,所述回转台设于圆形地坑内,所述回转盘上平面与地面平齐,所述回转盘上平面上沿外圆周边设有彩色环形标识,所述回转盘上圆心位置设有彩色圆心标识。
10.优选的,所述回转盘上沿外圆周边设有环形凸缘板,所述方向检测模块设于环形凸缘板内侧,所述彩色环形标识设于环形凸缘板上。
11.优选的,所述回转台外周边上空四角处均设有球形反光镜,所述球形反光镜安装固定于球形反光镜固定架上,所述球形反光镜固定架设有两件,分别对称固定连接于车库
前框架左侧立柱和右侧立柱上,四件球形反光镜用于让驶入回转台的汽车驾驶员能看见车辆停放于回转台彩色环形标识内。
12.与现有技术相比,本发明的有益效果为:本发明通过系统自动方向检测次数及语音提示操作,司机可以快速、正确完成回转台驻车,通过系统自动方向检测判定并自动控制回转台按最小回转角度回转,从而提高车辆入、出库效率,减少了车辆调头、频繁转向操作,降低了存取车驾驶难度,降低了对车库前坪通行场地的要求,即使在狭窄场地,也能安装使用垂直循环立体车库,大大拓展了垂直循环立体车库应用场合。
13.1、通过实时方向检测,可自动识别来车方向,并计算出来车方向与车辆入库方向之间的夹角,自动控制回转台按最小回转角度、回转方向旋转,使来车快速旋转至正对车库门入库方向,解决了当车库前坪空间较小、车辆转弯半径大、停车驾驶技术欠佳时,车辆无法在车库门前对准车头摆直车身的问题,且回转台按最小夹角旋转更节能;2、通过设置球形反光镜、彩色环形标识和彩色圆心标识,使来车在任何驶入方向,驾驶员都可以观察到车辆是否进入彩色环形标识内;3、通过设置环形凸缘板,使驾驶员可以通过车辆的起伏次数确定车辆是否进入彩色环形标识内;4、通过角度传感器的实时检测,可以实时反馈汽车回转台旋转指令角度时伺服电机的实际旋转量,使控制器可以更好地控制伺服电机旋转量和旋转方向,从而可以更精准控制汽车回转台旋转到车头所要对正的方向。
附图说明
14.图1为本发明实施例自动控制方法逻辑原理框图;图2为本发明实施例有车辆进入回转台驻车状态俯视图;图3为本发明实施例回转台旋转后车辆入库状态俯视图;图4为本发明实施例车辆出库进入回转台驻车状态俯视图;图5为本发明实施例回转台旋转后车辆驶离状态俯视图;图6为本发明实施例立体车库左侧视图图7为回转台结构示意图;图8为本发明实施例回转盘俯视图。
15.图中:1、垂直循环立体车库,101、车库门,2、控制器,3、回转台,301、回转盘,3011、彩色环形标识,3012、彩色圆心标识,302、方向检测模块,303、环形凸缘板,304、伺服电机,305、角度传感器,4、车辆,5、球形反光镜固定架,6、球形反光镜,7、圆形地坑。
具体实施方式
16.在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”、“竖直”、“水平”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
17.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
18.本发明实施例立体车库车辆入出库车头方向自动控制方法包括车辆入库车头方向自动检测及自动控制方法和车辆出库车头方向自动控制方法。
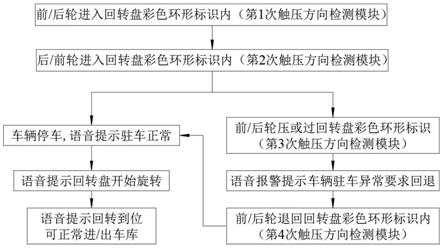
19.如图1、2、3所示,车辆4入库车头方向自动检测及自动控制方法包括如下步骤:s1、实时获取车辆4驶入立体车库门101正前方的回转台3时的前轮与后轮通过回转台3边缘的方位触发信号;s2、控制器2根据获取方位触发信号次数,发出语音提示引导车辆4完全进入回转台3并正确停车;前轮第一次通过回转台边缘时获取触发信号1次,后轮第一次通过回转台3边缘时获取触发信号2次,这时如果车辆4及时停车,此时车辆前后轮均在回转台3边缘内,控制器2在设定时间(如15s)未获取第3次触发信号,控制器2发出驻车正常的语音提示;如车辆4前轮在设定时间(如15s)内驶出了回转台3边缘,前轮第二次通过回转台3边缘时获取触发信号3次,控制器2发出驻车异常的语音警告,司机回退车辆4,前轮第三次通过回转台3边缘时获取触发信号4次,此时如果车辆4及时停车,车辆4前后轮再次回至回转台3边缘内,控制器2在设定时间(如15s)未获取第5次触发信号,控制器2发出驻车正常的语音提示;依此类推,控制器2在车辆4停车后设定时间内获取累计奇数次数的触发信号,均判定为驻车异常,在车辆4停车后设定时间内获取累计偶数次数的触发信号,均判定为驻车正常;s3、控制器2根据方位触发信号生成信号位置分布图像,确定车辆4进入回转台3的车头方向,并计算车头方向需转向正对立体车库门101方向的最小回转角度α和回转方向,并生成回转控制信号;s4、控制器2发出回转控制指令自动控制回转台2旋转,使车辆4车头方向正对立体车库门101入库方向;s5、控制器2同时发出立体车库门101开启控制指令,车库门101开启,将车辆4直行驶入载车板停车,完成入库;如图1、3、4所示,车辆4出库车头方向自动控制方法包括如下步骤:s6、根据车主将要出行方向,在控制器2面板上设置回转台3回转角度β和回转方向;s7、控制器2根据步骤s6的设置生成控制信号;s8、将车辆4直行退驶入回转台2,实时获取车辆4驶入回转台3时的前轮与后轮通过回转台3边缘的触发信号;s9、控制器2根据获取触发信号次数,发出语音提示引导车辆4完全进入回转台3并正确停车;后轮第一次通过回转台边缘时获取触发信号1次,前轮第一次通过回转台3边缘时获取触发信号2次,这时如果车辆4及时停车,此时车辆前后轮均在回转台3边缘内,控制器2在设定时间(如15s)未获取第3次触发信号,控制器2发出驻车正常的语音提示;如车辆4后轮在设定时间(如15s)内驶出了回转台3边缘,后轮第二次通过回转台3边缘时获取触发信号3次,控制器2发出驻车异常的语音警告,司机回退车辆4,后轮第三次通过回转台3边缘时获取触发信号4次,此时如果车辆4及时停车,车辆4前后轮再次回至回转台3边缘内,控制器2在设定时间(如15s)未获取第5次触发信号,控制器2发出驻车正常的
语音提示;依此类推,控制器2在车辆4停车后设定时间内获取累计奇数次数的触发信号,均判定为驻车异常,在车辆4停车后设定时间内获取累计偶数次数的触发信号,均判定为驻车正常;s10、控制器2发出回转控制指令自动控制回转台3旋转,使车辆车头方向正对步骤s6设置的车辆4驶离方向,将车辆4直行驶出即可。
20.作为优选,回转台3包括伺服电机304,步骤s3和步骤s6中控制器2还将根据车头需要回转的角度α或角度β计算伺服电机304的回转量,控制信号为伺服电机304的回转方向和回转量。
21.如图1至8所示,本发明一种立体车库车辆入出库车头方向自动控制系统实施例包括:回转台3,回转台3设于于立体车库1的车库门101正前方,包括设于顶部的回转盘301和设于回转盘301下部的回转动力系统,回转动力系统用于驱动回转盘301带着停驻在回转盘301上面的车辆4一起旋转;方向检测模块302,方向检测模块302设于回转盘301下平面上并沿回转盘301外圆周边环形布置,实时检测驶入回转盘301的车辆4前轮和后轮通过的方位触发信号;车辆4前轮和后轮每次压触方向检测模块302一次,方向检测模块302都将给控制器2发送方位触发信号1次;控制器2,控制器2与方向检测模块302通讯连接,控制器2根据获取方位触发信号次数,发出语音提示引导车辆4完全进入回转盘301并正确停车;并根据方位触发信号生成信号位置分布图像,确定车辆4进入回转台3的车头方向,并计算车头方向需转向正对立体车库门101方向的最小回转角度α和回转方向,并生成回转控制信号,发出控制指令控制回转动力系统驱动回转盘301按计算的最小回转角度和回转方向回转;控制器2控制面板上设有语音提示模块,用于提示及引导汽车驾驶员在回转台上正确驻车;回转动力系统包括伺服电机304和与伺服电机304相连的传动轴,传动轴上设有角度传感器305,角度传感器305与控制器2相联,用于检测伺服电机304实际旋转量和旋转方向。通过角度传感器304的实时检测,可以实时反馈回转台3旋转指定角度α时伺服电机304的实际旋转量,使控制器2可以更好地控制伺服电机304旋转量和旋转方向,从而可以更精准控制回转台3旋转到车头所要对正的方向。
22.作为优选,回转台3设于圆形地坑7内,回转盘301上平面与地面平齐,回转盘301上平面上沿外圆周边设有彩色环形标识3011,回转盘301上圆心位置设有彩色圆心标识3012。方便车辆4对准彩色圆心标识3012方向进入回转盘301彩色环形标识3011内正确驻车。
23.作为优选,回转盘301上沿外圆周边设有环形凸缘板303,方向检测模块302设于环形凸缘板303内侧,彩色环形标识3011设于环形凸缘板303上。 车辆4前后轮通过环形凸缘板303时都会给车辆驾驶员产生起伏感,使驾驶员能更快更好地在回转盘301上正确停车。
24.作为优选,回转台3外周边上空四角处均设有球形反光镜6,球形反光镜6安装固定于球形反光镜固定架5上,球形反光镜固定架5设有两件,分别对称固定连接于车库前框架左侧立柱和右侧立柱上,四件球形反光镜6用于让驶入回转台3的汽车驾驶员能看见车辆4停放于回转台彩色环形标识3011内。
25.作为优选,方向检测模块302采用矩阵式薄膜压力传感器,矩阵式薄膜压力传感器可将车辆4前轮与后轮压触该传感器的位置信号发送至控制器2,并通过控制器2生成信号位置分布图像实时显示,从而计算出车辆4驶入车头方向与正对车库门101方向之间的夹角α。
26.作为优选,角度传感器305采用绝对值编码器。
27.本发明使各向来车均通过回转台3简单快捷地将车头旋转至对准车库门101存车,取车时能将车头自动旋转至司机所选方向直接驶离,减少了车辆4调头、频繁转向操作,降低了存取车驾驶难度,大大提高了车库的存取车综合效率,降低了对车库前坪通行场地的要求,即使在狭窄场地,也能安装使用垂直循环立体车库,大大拓展了垂直循环立体车库应用场合。
28.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。